一种智能机器人用零部件清洗设备
本发明属于零部件清洗,具体是一种智能机器人用零部件清洗设备。
背景技术:
1、目前,智能机器人的结构较为复杂,其包括诸多的环状以及筒状构件,例如轴承以及气缸等,在智能机器人组装时,需要预先对组成轴承的钢圈以及气缸的缸筒进行清洗,以去除钢圈以及缸筒表面的杂物以及油污,进而提高后续的装配精度。
2、现有技术中,轴承钢圈以及气缸筒的清洗大致可分为人工手动清洗以及依靠清洗设备清洗,前者存在清洗效率低下的缺陷,后者则是将钢圈以及气缸筒投放至装有清洗液的容器中并配以搅拌机构对清洗液进行搅动,使得清洗液与钢圈以及气缸筒充分接触,然而虽然清洗液搅动时与钢圈以及气缸筒的接触更加充分,但是钢圈以及气缸筒上的一些较为顽固的杂物以及油污还是难以有效清洗,导致清洗效果仍旧不理想。
技术实现思路
1、针对上述现有技术的不足,本发明实施例要解决的技术问题是提供一种智能机器人用零部件清洗设备。
2、为解决上述技术问题,本发明提供了如下技术方案:
3、一种智能机器人用零部件清洗设备,包括底座、第一清洗组件、第二清洗组件、第一驱动组件、限位组件以及第二驱动组件,
4、所述底座一侧开设有清洗液槽,
5、所述第一驱动组件以及第二驱动组件设置在所述底座一侧,
6、所述第一驱动组件用于带动所述第一清洗组件转动,
7、所述第二驱动组件用于带动所述第一清洗组件以及所述第二清洗组件圆周运动,
8、待清洗的筒状或者环状零部件能够套设于所述第一清洗组件外部,当待清洗的筒状或者环状零部件套设于所述第一清洗组件外部后,所述第二清洗组件接触待清洗的筒状或者环状零部件外壁,
9、所述第一清洗组件以及所述第二清洗组件转动时可将待清洗的筒状或者环状零部件自所述清洗液槽右侧转入,并从所述清洗液槽左侧转出,
10、当待清洗的筒状或者环状零部件沿所述清洗液槽内部右侧半区移动时,所述限位组件用于将所述第一清洗组件与待清洗的筒状或者环状零部件之间限定为一体,
11、当待清洗的筒状或者环状零部件沿所述清洗液槽内部左侧半区移动时,所述限位组件用于将所述第二清洗组件与待清洗的筒状或者环状零部件之间限定为一体。
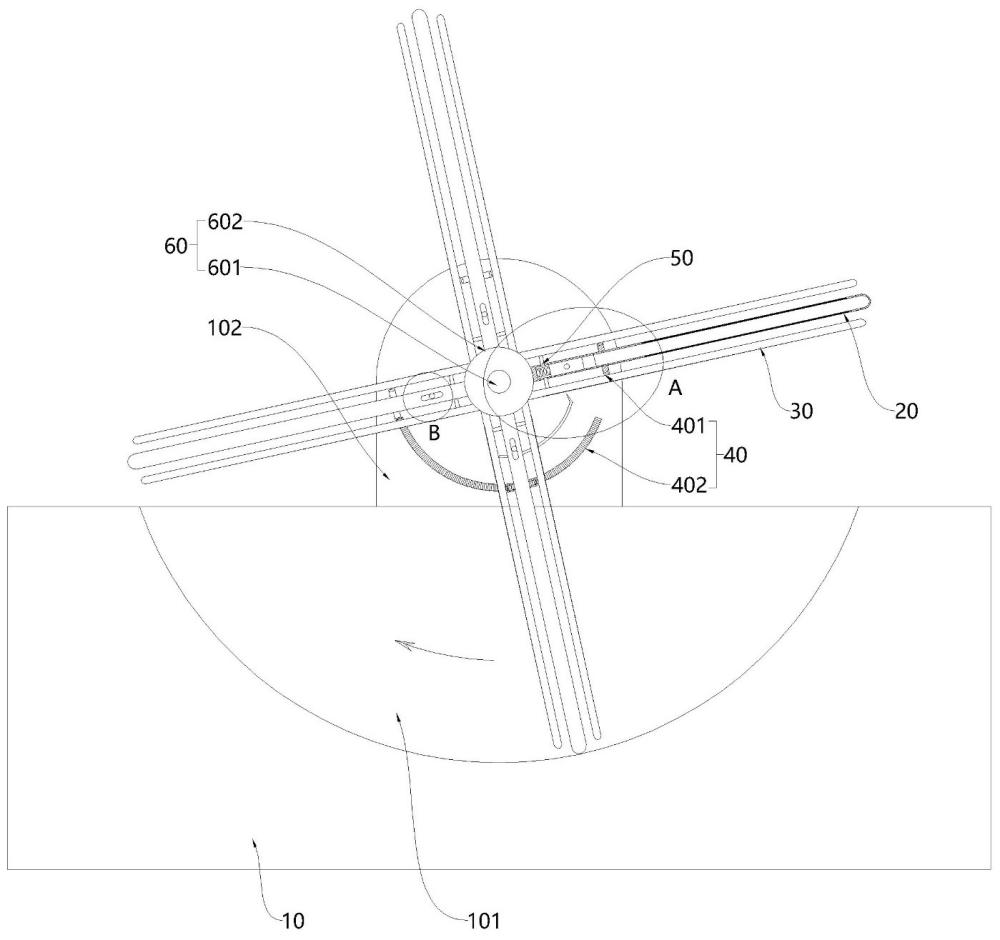
12、作为本发明进一步的改进方案:所述底座位于所述清洗液槽边缘一侧固定设置有支撑板,
13、所述第二驱动组件包括电机以及转轮,所述电机固定安装在所述支撑板一侧,所述转轮一侧通过转轴与所述电机的输出端相连,
14、所述第一清洗组件包括第一管体,所述第一管体一端与所述转轮圆周侧壁相连,
15、所述第二清洗组件包括两组第二管体,两组所述第二管体分别设置在所述第一管体相对两侧,两组所述第二管体一端均与所述转轮圆周侧壁相连。
16、作为本发明进一步的改进方案:所述转轮圆周侧壁固定设置有储气筒,所述第一管体设置在所述储气筒远离所述转轮的一端并与所述储气筒转动配合,
17、所述第一管体侧壁沿长度方向设置有第一柔性层,两组所述第二管体侧壁沿长度方向设置有第二柔性层,
18、所述第一驱动组件包括齿轮以及弧形齿条,所述弧形齿条固定设置在所述支撑板一侧,所述齿轮固定设置在所述第一管体外部并能够与所述弧形齿条啮合,
19、所述限位组件活动设置在所述储气筒内部,当筒状或者环状零部件沿所述清洗液槽内部右侧半区移动时,所述限位组件沿所述储气筒内部移动,以向所述第一管体内部进行压气动作,同时对所述第二管体内部进行抽气动作,
20、当筒状或者环状零部件沿所述清洗液槽内部左侧半区移动时,所述限位组件沿所述储气筒内部反向移动,以向所述第二管体内部进行压气动作,同时对所述第一管体内部进行抽气动作。
21、作为本发明进一步的改进方案:所述储气筒侧壁沿长度方向开设有滑槽,两组所述第二管体一侧均通过连接管与所述储气筒相连,
22、所述限位组件包括弹性件以及活塞杆,
23、所述活塞杆活动设置在所述储气筒内部,所述弹性件一端与所述储气筒内壁相连,另一端与所述活塞杆相连,所述活塞杆侧壁固定设置有延伸杆,所述延伸杆远离所述活塞杆的一端自所述滑槽延伸至所述储气筒外部,所述支撑板一侧固定设置有弧形限位板,所述弧形限位板一端设置有呈倾斜分布的导向板。
24、作为本发明再进一步的改进方案:所述第一柔性层以及所述第二柔性层为橡胶层或硅胶层。
25、作为本发明再进一步的改进方案:所述弹性件为弹簧或金属弹片。
26、作为本发明再进一步的改进方案:所述清洗液槽呈弧形结构。
27、与现有技术相比,本发明的有益效果是:
28、本发明实施例中,当需要对智能机器人的筒状或者环状零部件进行清洗时,可将筒状或者环状零部件套设于第一清洗组件外部,此时第一清洗组件与筒状或者环状零部件内壁接触,第二清洗组件与筒状或者环状零部件外壁接触,随后通过第二驱动组件带动第一清洗组件以及第二清洗组件圆周运动,进而将筒状或者环状零部件自清洗液槽右侧转入清洗液槽内部,再从清洗液槽左侧转出至清洗液槽外部,使得筒状或者环状零部件浸没于清洗液槽内部的清洗液中,实现筒状或者环状零部件的清洗;上述过程中,第一驱动组件始终带动第一清洗组件转动,当筒状或者环状零部件沿清洗液槽内部右侧半区移动时,限位组件将第一清洗组件与筒状或者环状零部件限定为一体,使得当第一清洗组件转动时能够带动筒状或者环状零部件同步转动,而第二清洗组件接触筒状或者环状零部件外壁并与筒状或者环状零部件产生相对转动,进而对筒状或者环状零部件外壁进行擦拭,当筒状或者环状零部件沿清洗液槽内部左侧半区移动时,限位组件将第二清洗组件与筒状或者环状零部件限定为一体,使得第一清洗组件与筒状或者环状零部件内壁发生相对转动,进而对筒状或者环状零部件内壁进行擦拭。相较于现有技术,在待清洗的筒状或者环状零部件移动至清洗液槽内部时能够实现筒状或者环状零部件内外壁的双重擦拭,从而提高了筒状或者环状零部件的清洗效果以及清洗效率。
技术特征:
1.一种智能机器人用零部件清洗设备,其特征在于,包括底座、第一清洗组件、第二清洗组件、第一驱动组件、限位组件以及第二驱动组件,
2.根据权利要求1所述的一种智能机器人用零部件清洗设备,其特征在于,所述底座位于所述清洗液槽边缘一侧固定设置有支撑板,
3.根据权利要求2所述的一种智能机器人用零部件清洗设备,其特征在于,所述转轮圆周侧壁固定设置有储气筒,所述第一管体设置在所述储气筒远离所述转轮的一端并与所述储气筒转动配合,
4.根据权利要求3所述的一种智能机器人用零部件清洗设备,其特征在于,所述储气筒侧壁沿长度方向开设有滑槽,两组所述第二管体一侧均通过连接管与所述储气筒相连,
5.根据权利要求3所述的一种智能机器人用零部件清洗设备,其特征在于,所述第一柔性层以及所述第二柔性层为橡胶层或硅胶层。
6.根据权利要求4所述的一种智能机器人用零部件清洗设备,其特征在于,所述弹性件为弹簧或金属弹片。
7.根据权利要求1所述的一种智能机器人用零部件清洗设备,其特征在于,所述清洗液槽呈弧形结构。
技术总结
本发明提供了一种智能机器人用零部件清洗设备,属于零部件清洗技术领域,包括底座、第一清洗组件、第二清洗组件、第一驱动组件、限位组件以及第二驱动组件,所述底座一侧开设有清洗液槽,所述第一驱动组件以及第二驱动组件设置在所述底座一侧,所述第一驱动组件用于带动所述第一清洗组件转动,所述第二驱动组件用于带动所述第一清洗组件以及所述第二清洗组件圆周运动,待清洗的筒状或者环状零部件能够套设于所述第一清洗组件外部。本发明实施例相较于现有技术,在待清洗的筒状或者环状零部件移动至清洗液槽内部时能够实现筒状或者环状零部件内外壁的双重擦拭,从而提高了筒状或者环状零部件的清洗效果以及清洗效率。
技术研发人员:唐小洁,李元林
受保护的技术使用者:四川大学锦江学院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!