一种智能激光清洗控制系统的制作方法
本发明涉及激光清洗,尤其涉及一种智能激光清洗控制系统。
背景技术:
1、用于地铁车辆的转向构架在大修时需要进行清洗和无损探伤,目前转向构架零部件的清洗大多以人工方式为主,转向构架焊缝常用的探伤采方式为磁粉探伤,而在进行磁粉探伤工作前,需将转向构架焊缝表面的油漆清除。目前转向构架常用的脱漆方式有化学试剂除漆和喷砂除漆。
2、现有的化学试剂除漆方法中,工人首先用毛刷将脱漆剂涂抹在部件上,等待一段时间后(约半小时),在用工业吸油布擦拭或化学试剂清洗。但目前的化学试剂除漆方式存在着以下的问题:
3、(1)人工成本高,需要工人拿毛刷将脱漆剂涂在需要脱漆的地方,需要耗费大量人工成本。
4、(2)耗时高,脱漆剂涂抹完毕后需要放置一段时间(至少半小时)才能实现脱漆,而未清理干净部分需采用手工机械打磨,针对锈迹、油污等非油漆类污物,脱漆剂对其无效,影响探伤及再上漆,因此需额外增加清洗步骤,使清洗时间进一步增加。
5、(3)废液处理成本高,使用脱漆剂造成的废液(包含油漆、脱漆剂等物质)不易处理。
6、(4)脱漆产生的气味很大,对操作工的健康有极大的威胁,同时废液对环境有较大污染。
7、喷砂除漆需要将磨料用高速喷向转向构架表面,利用磨料对转向构架表面的冲击和切削作用,使转向构架表面获得一定的清洁度和不同的粗糙度,从而清除转向构架表面的油漆。但目前喷砂除漆存在着以下的问题:
8、(1)由于喷砂采用压缩空气为动力,以形成高速喷射束将喷料(铜矿砂、石英砂、金刚砂、铁砂、海砂)高速喷射到转向构架表面表面,使转向构架表面的外表或形状发生变化,因此对转向构架尺寸和表面粗糙度有影响。
9、(2)喷砂会产生大量的粉尘和噪音,对操作工的健康有极大的威胁,同时对环境有较大污染。
10、(3)构架探伤工序中仅需对焊缝进行除漆后探伤,喷砂工艺对构架外表面所有油漆进行清除,产生了大面积无效清洗区,浪费了大量油漆,增加了制造成本。
11、(4)喷砂设备由于长期高压高流速高磨损工作,设备需两年更新一次,设备使用寿命短,设备成本高。
12、激光除漆是一种全自动、高效无污染的除漆方式,有效解决了上述污染大、人工成本高以及效率低的问题,申请号为cn202210878746.7,名称为一种地铁车辆段结构及其转向架检修工艺公开了使用激光来去除转向架表面油漆。但是在该申请中,对于转向架表面的清洗是通过设置构架清洗工位,利用构架清洗工位上的自动化清洗设备对构架进行水清洗,然后再对转向架进行修复、除漆操作。该种清洗方式中转向架的清洗和除漆分步进行,导致转向架的清洁效率不高。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种智能激光清洗控制系统,用于同步进行对转向架的清洗和除漆操作,显著提升转向架的清洁效率。
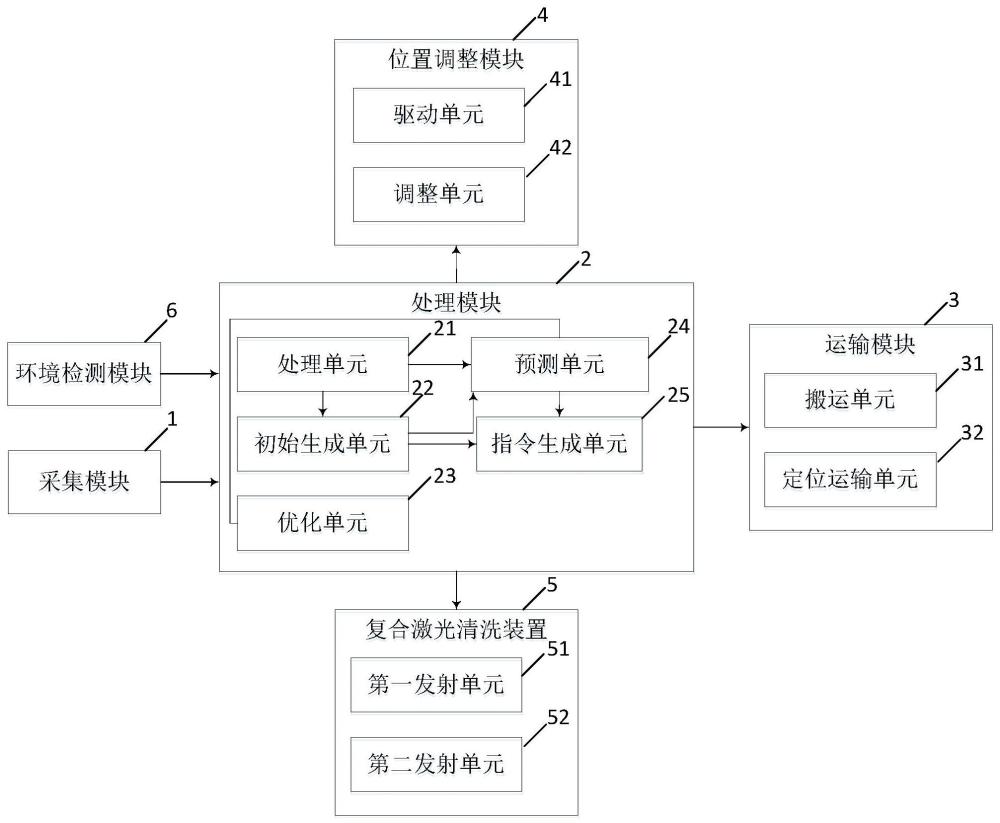
2、为实现上述目的,本发明提供了如下技术方案:一种智能激光清洗控制系统,包括:
3、采集模块,用于实时采集转向构架的三维点云数据;
4、处理模块,连接所述采集模块,用于根据所述三维点云数据生成所述转向构架的构架三维坐标和表面颜色数据,根据所述表面颜色数据处理得到激光输出指令;
5、运输模块,连接所述处理模块,用于根据所述构架三维坐标将所述转向构架运输至清洗工位,所述清洗工位处设有复合激光清洗装置;
6、位置调整模块,连接所述处理模块,用于根据所述构架三维坐标调节所述复合激光清洗装置的三维空间位置,以使所述复合激光清洗装置朝向所述转向构架;
7、所述复合激光清洗装置连接所述处理模块,并包括:
8、第一发射单元,用于根据所述激光输出指令向所述转向构架输出半导体激光,以减小所述转向构架的金属材料与表面附着物之间的结合力;
9、第二发射单元,用于根据所述激光输出指令向所述转向构架输出脉冲激光,以使表面附着物脱离金属材料。
10、进一步地,所述清洗工位位于清洗工作站内,所述构架三维坐标包括第一三维坐标和第二三维坐标,所述第一三维坐标和所述第二三维坐标分别为所述转向构架在所述清洗工作站内外时的三维坐标,所述运输模块包括搬运单元,用于根据所述第二三维坐标将所述转向构架搬运至所述清洗工作站内。
11、进一步地,所述运输模块还包括定位运输单元,用于根据所述第一三维坐标将所述转向构架搬运至所述清洗工位。
12、进一步地,还包括环境检测模块,连接所述处理模块,用于实时检测所述清洗工位处的温度数据、湿度数据和空气浑浊指数,所述采集模块还用于采集所述复合激光清洗装置的装置三维坐标和激光当前输出参数。
13、进一步地,所述处理模块包括:
14、处理单元,用于根据所述所述装置三维坐标和所述第一三维坐标处理得到所述复合激光清洗装置与所述转向构架之间的实时相对距离和实时相对角度;
15、优化单元,用于根据所述温度数据、所述湿度数据和所述空气浑浊指数调整预设的清洁预测模型的权重参数并重新训练,得到优化清洁预测模型。
16、进一步地,所述处理模块还包括预测单元,连接所述优化单元和所述处理单元,用于将所述实时相对距离、所述实时相对角度、所述当前清洁面积和所述激光当前输出参数输入所述优化清洁预测模型中,得到下一时刻的预测清洁面积。
17、进一步地,所述处理模块还包括:
18、初始生成单元,用于根据所述表面颜色数据处理得到所述转向构架表面氧化膜的目标种类以及所述转向构架表面的当前清洁面积,进而根据所述目标种类生成初始激光指令;
19、指令优化单元,连接所述预测单元和所述初始生成单元,用于根据所述预测清洁面积生成激光调整指令和位置调整指令,根据所述激光调整指令调整所述初始激光指令得到所述激光输出指令。
20、进一步地,所述位置调整模块包括驱动单元,用于根据所述第一三维坐标驱动所述复合激光清洗装置运动至所述清洗工位。
21、进一步地,所述位置调整模块还包括调整单元,用于根据所述位置调整指令调整所述复合激光清洗装置与所述转向构架之间的距离和角度。
22、本发明的有益效果:
23、本发明通过采集得到转向构架的三维点云数据,然后通过对三维点云数据的处理得到构架三维坐标和激光输出指令,根据构架三维坐标将转向构架运输到清洗工位,同时调整复合激光清洗装置与转向构架之间的相对位置,最终复合激光清洗装置中的第一发射单元和第二发射单元同步向转向构架输出半导体激光和脉冲激光,在利用半导体激光减小转向构架的金属材料与表面附着物之间的结合力的同时利用脉冲激光使表面附着物脱离金属材料,同步进行对转向构架的清洗和除漆操作,显著提升了转向构架的清洁效率。
技术特征:
1.一种智能激光清洗控制系统,其特征在于,包括:
2.根据权利要求1所述的智能激光清洗控制系统,其特征在于:所述清洗工位位于清洗工作站内,所述构架三维坐标包括第一三维坐标和第二三维坐标,所述第一三维坐标和所述第二三维坐标分别为所述转向构架在所述清洗工作站内外时的三维坐标,所述运输模块包括搬运单元,用于根据所述第二三维坐标将所述转向构架搬运至所述清洗工作站内。
3.根据权利要求2所述的智能激光清洗控制系统,其特征在于:所述运输模块还包括定位运输单元,用于根据所述第一三维坐标将所述转向构架搬运至所述清洗工位。
4.根据权利要求2所述的智能激光清洗控制系统,其特征在于:还包括环境检测模块,连接所述处理模块,用于实时检测所述清洗工位处的温度数据、湿度数据和空气浑浊指数,所述采集模块还用于采集所述复合激光清洗装置的装置三维坐标和激光当前输出参数。
5.根据权利要求4所述的智能激光清洗控制系统,其特征在于:所述处理模块包括:
6.根据权利要求5所述的智能激光清洗控制系统,其特征在于:所述处理模块还包括预测单元,连接所述优化单元和所述处理单元,用于将所述实时相对距离、所述实时相对角度、所述当前清洁面积和所述激光当前输出参数输入所述优化清洁预测模型中,得到下一时刻的预测清洁面积。
7.根据权利要求6所述的智能激光清洗控制系统,其特征在于:所述处理模块还包括:
8.根据权利要求2所述的智能激光清洗控制系统,其特征在于:所述位置调整模块包括驱动单元,用于根据所述第一三维坐标驱动所述复合激光清洗装置运动至所述清洗工位。
9.根据权利要求7所述的智能激光清洗控制系统,其特征在于:所述位置调整模块还包括调整单元,用于根据所述位置调整指令调整所述复合激光清洗装置与所述转向构架之间的距离和角度。
技术总结
本发明公开了一种智能激光清洗控制系统,包括采集模块实时采集转向构架的三维点云数据;处理模块根据三维点云数据生成转向构架的构架三维坐标、偏转角度和表面颜色数据,根据表面颜色数据处理得到激光输出指令;运输模块根据构架三维坐标将转向构架运输至清洗工位,清洗工位处设有复合激光清洗装置;位置调整模块根据构架三维坐标和偏转角度调节复合激光清洗装置的三维空间位置;第一发射单元根据激光输出指令向转向构架输出半导体激光,以减小转向构架的金属材料与表面附着物之间的结合力;第二发射单元根据激光输出指令向转向构架输出脉冲激光,以使表面附着物脱离金属材料。本发明显著提升转向架清洁效率。
技术研发人员:张伟丰,黄慧建,金健,方紫玲,赵明,段佳伟,杜强,祁永刚
受保护的技术使用者:浙江中数激光装备有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!