光伏板清洗机器人的制作方法
本公开涉及光伏板清洁,尤其是一种光伏板清洗机器人。
背景技术:
1、光伏板在长期使用过程中,表面容易沉积大量灰尘,光伏板的能量转化能力下降,因此,需要定期对光伏板进行清理,以提高光伏板的工作效率。
2、目前清洗光伏板采用的方法大致分为人工清洗和自动化机械清洗两种。人工清洁耗时耗力且具有人员安全危险。自动化机械通常包括带喷水或毛刷的工程车、导轨式光伏清洁机器、爬虫式履带光伏清洗机器人和门架式光伏清洗机器人。带喷水或毛刷的工程车适合在地面集中式光伏站,且需要较宽的光伏板安装间距用于行车,这样会影响光伏场站的利用率。导轨式光伏清洁机器因安装在光伏板上,只能清洁同排一段距离的光伏板,且因长期暴露在户外,受户外温度变化等影响,容易老化失能,寿命较短。爬虫式履带光伏清洗机器人在光伏板上行走清洁光伏,对光伏板安装角度有限制,若安装倾斜角度超过30°,则一般无法适应,且在光伏板上行走,速度较慢,无法适应大规模光伏站场的清洁要求。门架式光伏清洗机器人对地面的平整程度要求较高,遇到地面坑洼起伏时,容易倾倒,压到光伏板上产生隐裂,对光伏板造成破坏。
技术实现思路
1、本公开实施例提供一种光伏板清洗机器人,以解决现有技术中光伏板清洗机器人在坑洼起伏的路面行走容易倾倒的问题。
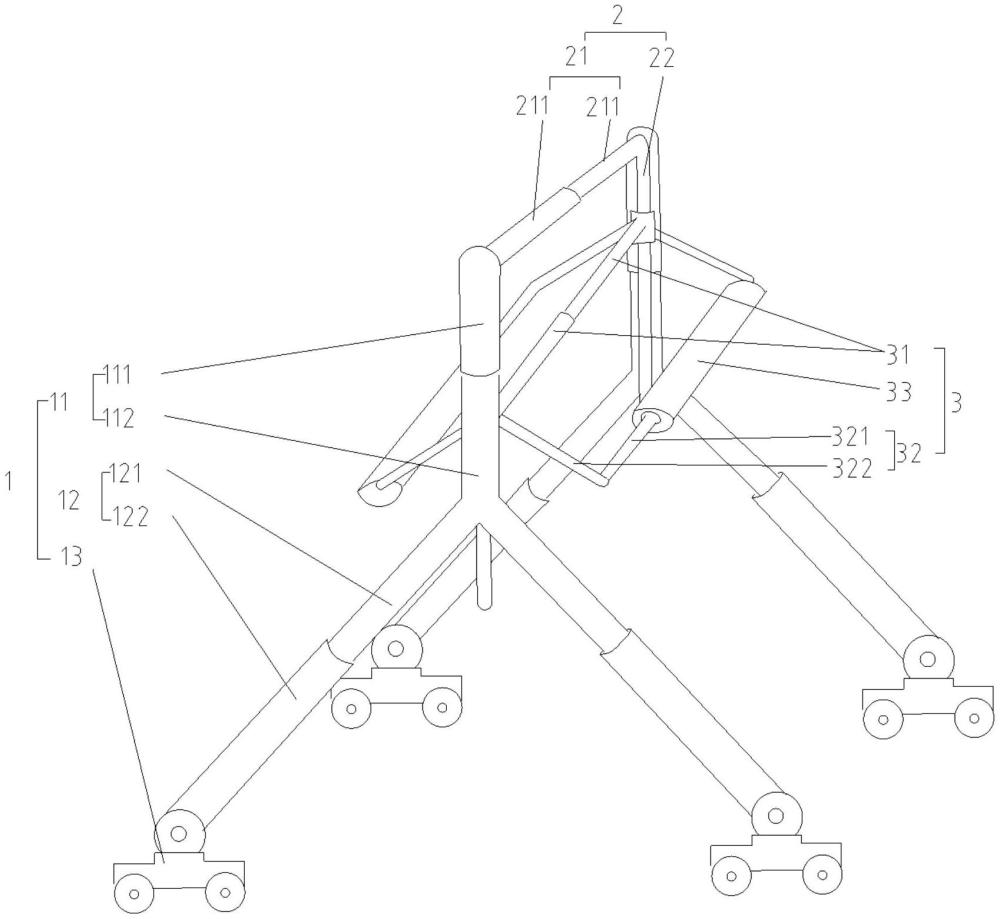
2、本公开提供一种光伏板清洗机器人,包括:
3、两个支架,两个所述支架间隔设置,所述支架上设置行走装置;
4、活动架,所述活动架设置于两个所述支架之间,且所述活动架分别与两个所述支架可转动地连接;
5、清扫组件,所述清扫组件设置于两个所述支架之间,所述清扫组件连接于所述活动架,所述清扫组件具有至少两个滚刷,各所述滚刷沿光伏板清洗机器人的行走方向依次设置。
6、可选的,所述活动架包括横梁和两个竖杆;
7、两个所述竖杆分别连接于所述横梁,两个所述竖杆间隔设置;
8、所述横梁或所述竖杆可转动地连接于所述支架;
9、所述清扫组件分别连接于两个所述竖杆。
10、可选的,所述清扫组件的两端能分别能沿相应的竖杆平移以调节所述清扫组件的倾斜角度。
11、可选的,所述清扫组件包括两个端部件和至少两个滚刷架;
12、两个所述端部件分别可活动地设置于所述竖杆;
13、各所述滚刷架的两端分别连接于两个所述端部件;
14、各所述滚刷分别设置于相应的滚刷架。
15、可选的,所述滚刷架包括安装杆和设置于所述安装杆两端的连杆;
16、两端的连杆分别连接于相应的端部件;
17、所述滚刷设置于所述安装杆。
18、可选的,所述活动架包括加强梁,所述加强梁分别连接两个所述竖杆。
19、可选的,所述横梁包括两个梁体,两个所述梁体分别连接于相应的支架;
20、两个所述竖杆分别连接于两个所述梁体;
21、两个所述梁体中一者可滑动地套设于另一者,两个所述梁体能相对移动以调节两者的重合长度。
22、可选的,所述清扫组件能沿所述两个所述支架的排列方向伸缩,以调节延伸长度。
23、可选的,所述支架包括立柱和两个斜撑;
24、两个所述斜撑相对的一端相靠拢,且分别连接于所述立柱;
25、两个所述斜撑的另一端相分离,且端部连接有行走装置;
26、所述活动架连接于所述立柱。
27、可选的,所述斜撑包括第一斜撑段和第二斜撑段;
28、所述第一斜撑段和所述第二斜撑段中,一者可滑动地套设于另一者,两者能相对移动以调节两者的重合长度;
29、所述第一斜撑段连接于所述立柱,所述第二斜撑段背离所述第一斜撑段的一端连接所述行走装置。
30、可选的,所述立柱包括第一立柱和第二立柱;
31、所述第一立柱和所述第二立柱中,一者可滑动地套设于另一者,两者能相对移动以调节两者的重合长度;
32、所述活动架连接于所述第一立柱,所述斜撑连接于所述第二立柱。
33、可选的,所述行走装置包括车体和连接所述车体的车轮;
34、所述车体铰接于所述斜撑。
35、通过采用上述技术方案,使得本公开具有如下有益效果:
36、当支架存在倾斜趋势时,倾斜力通过支架和活动架传递至清扫组件,并最终分担至清扫组件上的多条滚刷上,清扫组件在光伏板上受到反作用力可抵消支架的倾斜力,避免支架出现更大幅度的倾斜。
37、下面通过附图和实施例,对本公开的技术方案做进一步的详细描述。
技术特征:
1.一种光伏板清洗机器人,其特征在于,包括:
2.根据权利要求1所述的光伏板清洗机器人,其特征在于,所述活动架包括横梁和两个竖杆;
3.根据权利要求2所述的光伏板清洗机器人,其特征在于,所述清扫组件的两端能分别能沿相应的竖杆平移以调节所述清扫组件的倾斜角度。
4.根据权利要求2所述的光伏板清洗机器人,其特征在于,所述清扫组件包括两个端部件和至少两个滚刷架;
5.根据权利要求4所述的光伏板清洗机器人,其特征在于,所述滚刷架包括安装杆和设置于所述安装杆两端的连杆;
6.根据权利要求2所述的光伏板清洗机器人,其特征在于,所述活动架包括加强梁,所述加强梁分别连接两个所述竖杆。
7.根据权利要求2所述的光伏板清洗机器人,其特征在于,所述横梁包括两个梁体,两个所述梁体分别连接于相应的支架;
8.根据权利要求1-7任一所述的光伏板清洗机器人,其特征在于,所述清扫组件能沿所述两个所述支架的排列方向伸缩,以调节延伸长度。
9.根据权利要求1-7任一所述的光伏板清洗机器人,其特征在于,所述支架包括立柱和两个斜撑;
10.根据权利要求9所述的光伏板清洗机器人,其特征在于,所述斜撑包括第一斜撑段和第二斜撑段;
11.根据权利要求9所述的光伏板清洗机器人,其特征在于,所述立柱包括第一立柱和第二立柱;
12.根据权利要求9所述的光伏板清洗机器人,其特征在于,所述行走装置包括车体和连接所述车体的车轮;
技术总结
本公开实施例提供一种光伏板清洗机器人,包括活动架、清扫组件和两个支架,两个支架间隔设置。活动架设置于两个支架之间,且活动架分别与两个支架可转动地连接。清扫组件设置于两个支架之间,清扫组件连接于活动架,清扫组件具有至少两个滚刷,各滚刷沿光伏板清洗机器人的行走方向依次设置。本公开的活动架可转动地连接于支架,活动架可依赖重力下垂,清扫组件与光伏板始终保持一定压力的接触,减少对光伏板震动冲击。当支架存在倾斜趋势时,倾斜力通过支架和活动架传递至清扫组件,并最终分担至清扫组件上的多条滚刷上,清扫组件在光伏板上受到反作用力可抵消支架的倾斜力,避免支架出现更大幅度的倾斜,利于光伏板清洗机器人顺利完成清洁任务。
技术研发人员:邹文豪
受保护的技术使用者:南京后摩智能科技有限公司
技术研发日:20230726
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!