一种全方位可升降的多功能自动作业集成装置的制作方法
本技术属于涂装,具体涉及一种全方位可升降的多功能自动作业集成装置。
背景技术:
1、现阶段,在对类似于桥梁、船舶、海工平台、大型钢构等大型工件表面进行打磨、喷砂、喷漆作业时,作业设备必须移动才能完成整个作业面的工作,作业不便利、工作效率低、打磨、喷砂、喷漆作业质量不稳定且损害工人身体健康。
2、而这类工件作业面积大、位置高,传统的方式是人工操作,人工作业时需要爬高、登高,存在安全隐患,劳动强度极大、工作效率极低,而且,在移动作业时,经常比较费时费力而且不安全等情况。
技术实现思路
1、本实用新型的目的在于提供一种全方位可升降的多功能自动作业集成装置,旨在解决现有技术中的因喷漆面位置高不安全、作业面积大劳动强度大的问题,同时解决了人工频繁配漆等待作业的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
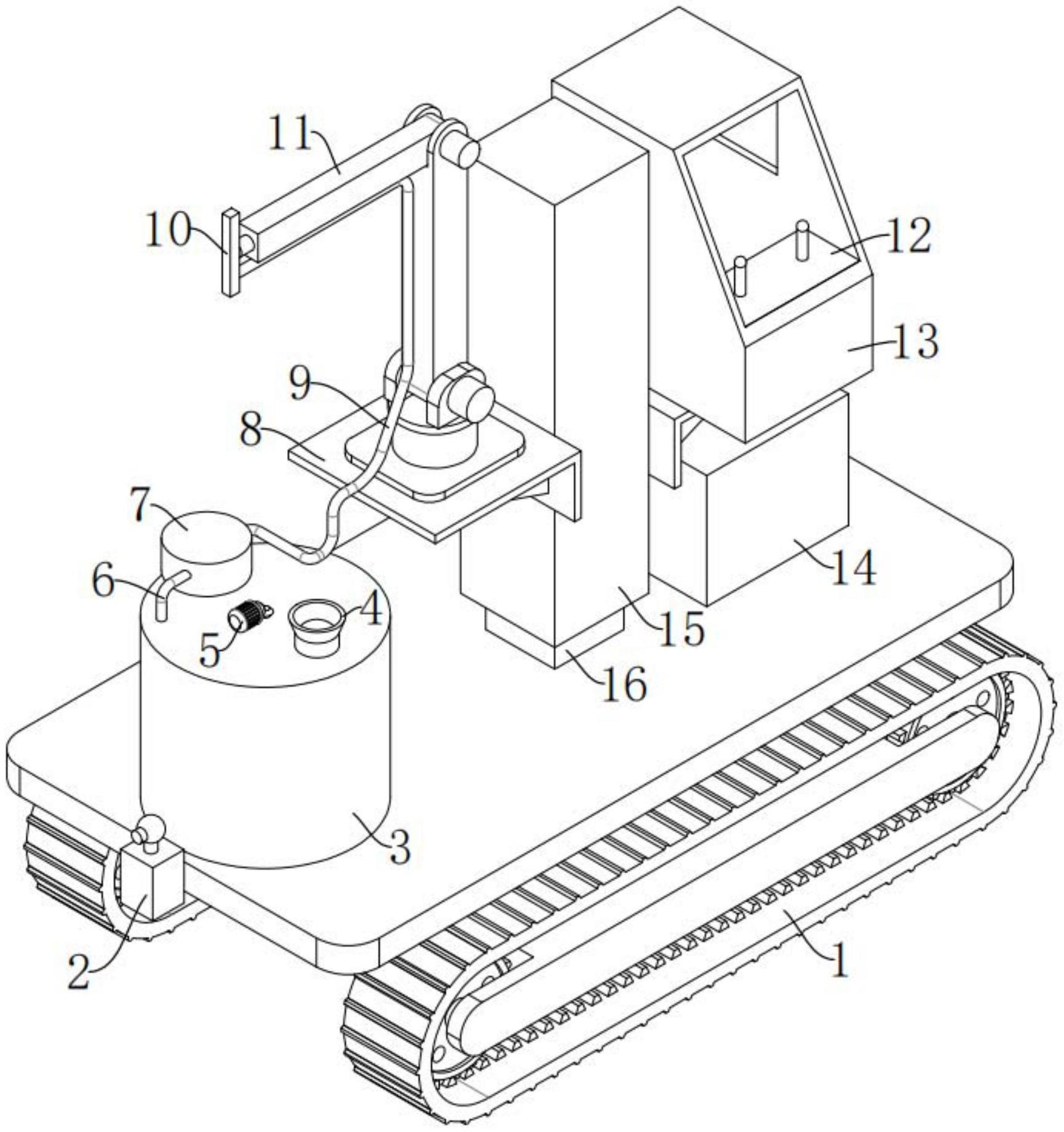
3、一种全方位可升降的多功能自动作业集成装置,包括:
4、履带车;
5、喷枪夹持机构,所述喷枪夹持机构设置于履带车的上侧;
6、物料容器,所述物料容器固定连接于履带车的上端,所述物料容器的上端固定连接有输料斗,所述输料斗与物料容器相连通;
7、升降移动机构,所述升降移动机构设置于履带车上,所述升降移动机构上设置有关节机械臂,所述关节机械臂与喷枪夹持机构连接以实现喷枪夹持机构移动;
8、供漆机构,所述供漆机构设置于物料容器上,所述供漆机构用于控制油漆输送至喷枪夹持机构内;以及
9、搅拌机构,所述搅拌机构设置于物料容器上,所述搅拌机构用于搅拌油漆。
10、作为本实用新型一种优选的方案,所述升降移动机构包括升降部件、安装部件和操作部件,所述操作部件设置于履带车的上侧,所述操作部件用于控制装置,所述安装部件设置于履带车的上侧,所述安装部件与喷枪夹持机构连接以实现喷枪夹持机构移动,所述升降部件设置于履带车上,所述升降部件与安装部件连接以实现安装部件升降,且升降部件还与操作部件连接以实现操作部件升降。
11、作为本实用新型一种优选的方案,所述升降部件包括支撑底座、升降驱动机构和升降套,所述支撑底座固定连接于履带车的上端,所述升降驱动机构固定连接于支撑底座的下内壁,所述升降套固定连接于升降驱动机构的伸长端,且升降套套设于支撑底座的表面上。
12、作为本实用新型一种优选的方案,所述安装部件包括机器人支架,所述机器人支架固定连接于升降套的左端。
13、作为本实用新型一种优选的方案,所述操作部件包括驾驶室支架、人工操控设备和驾驶室,所述驾驶室支架固定连接于升降套的右端,所述驾驶室固定连接于驾驶室支架的上端,所述人工操控设备固定连接于驾驶室的下内壁。
14、作为本实用新型一种优选的方案,所述供漆机构包括连接硬管、过滤头、涂料泵和连接软管,所述涂料泵固定连接于物料容器的上端,所述涂料泵的输出端与喷枪夹持机构之间通过连接软管连通,所述物料容器的输入端与物料容器之间通过连接硬管连通,所述连接硬管的其中一个一端延伸至物料容器内,所述过滤头固定连接于连接硬管的其中一端,且过滤头位于物料容器内。
15、作为本实用新型一种优选的方案,所述搅拌机构包括驱动电机、第二锥形齿轮、第一锥形齿轮、转轴和扇叶,所述驱动电机固定连接于物料容器的上端,所述第二锥形齿轮固定连接于驱动电机的输出端,所述转轴转动连接于物料容器的上端,且转轴活动贯穿物料容器并延伸至物料容器内,所述第一锥形齿轮固定连接于转轴的上端,且第一锥形齿轮与第二锥形齿轮相互啮合,所述扇叶设置有多个,多个所述扇叶均固定连接于转轴的圆周表面上,且多个所述扇叶均位于物料容器内。
16、作为本实用新型一种优选的方案,所述履带车的左端固定连接有导航设备。
17、作为本实用新型一种优选的方案,所述履带车的上端固定连接有电控设备。
18、与现有技术相比,本实用新型的有益效果是:
19、1、本方案中,通过导航设备的协作下导航到指定地点,完成自动作业或远程操作,可替代人工作业,通过关节机械臂的设置可以很好的解决因喷漆面位置高不安全、作业面积大劳动强度大的问题,而且可以大大地增加工作效率,通过升降驱动机构和升降套的设置可以控制关节机械臂的升降,从而喷枪夹持机构可以喷至更高的喷漆面。
20、2、本方案中,通过物料容器的设置可以储存大量的油漆,通过涂料泵的设置,可以将物料容器内的油漆输送喷枪夹持机构内,使得可以进行长时间的喷漆作业,解决了频繁配漆等待作业的问题,通过扇叶的设置可以防止油漆凝固。
技术特征:
1.一种全方位可升降的多功能自动作业集成装置,其特征在于,包括:
2.根据权利要求1所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述升降移动机构包括升降部件、安装部件和操作部件,所述操作部件设置于履带车(1)的上侧,所述操作部件用于控制装置,所述安装部件设置于履带车(1)的上侧,所述安装部件与喷枪夹持机构(10)连接以实现喷枪夹持机构(10)移动,所述升降部件设置于履带车(1)上,所述升降部件与安装部件连接以实现安装部件升降,且升降部件还与操作部件连接以实现操作部件升降。
3.根据权利要求2所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述升降部件包括支撑底座(16)、升降驱动机构(18)和升降套(15),所述支撑底座(16)固定连接于履带车(1)的上端,所述升降驱动机构(18)固定连接于支撑底座(16)的下内壁,所述升降套(15)固定连接于升降驱动机构(18)的伸长端,且升降套(15)套设于支撑底座(16)的表面上。
4.根据权利要求3所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述安装部件包括机器人支架(8),所述机器人支架(8)固定连接于升降套(15)的左端。
5.根据权利要求4所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述操作部件包括驾驶室支架(17)、人工操控设备(12)和驾驶室(13),所述驾驶室支架(17)固定连接于升降套(15)的右端,所述驾驶室(13)固定连接于驾驶室支架(17)的上端,所述人工操控设备(12)固定连接于驾驶室(13)的下内壁。
6.根据权利要求5所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述供漆机构包括连接硬管(6)、过滤头(21)、涂料泵(7)和连接软管(9),所述涂料泵(7)固定连接于物料容器(3)的上端,所述涂料泵(7)的输出端与喷枪夹持机构(10)之间通过连接软管(9)连通,所述物料容器(3)的输入端与物料容器(3)之间通过连接硬管(6)连通,所述连接硬管(6)的其中一个一端延伸至物料容器(3)内,所述过滤头(21)固定连接于连接硬管(6)的其中一端,且过滤头(21)位于物料容器(3)内。
7.根据权利要求6所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述搅拌机构包括驱动电机(5)、第二锥形齿轮(20)、第一锥形齿轮(19)、转轴(22)和扇叶(23),所述驱动电机(5)固定连接于物料容器(3)的上端,所述第二锥形齿轮(20)固定连接于驱动电机(5)的输出端,所述转轴(22)转动连接于物料容器(3)的上端,且转轴(22)活动贯穿物料容器(3)并延伸至物料容器(3)内,所述第一锥形齿轮(19)固定连接于转轴(22)的上端,且第一锥形齿轮(19)与第二锥形齿轮(20)相互啮合,所述扇叶(23)设置有多个,多个所述扇叶(23)均固定连接于转轴(22)的圆周表面上,且多个所述扇叶(23)均位于物料容器(3)内。
8.根据权利要求7所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述履带车(1)的左端固定连接有导航设备(2)。
9.根据权利要求8所述的一种全方位可升降的多功能自动作业集成装置,其特征在于:所述履带车(1)的上端固定连接有电控设备(14)。
技术总结
本技术提供一种全方位可升降的多功能自动作业集成装置,属于涂装技术领域,包括:履带车;喷枪夹持机构,喷枪夹持机构设置于履带车的上侧;物料容器,物料容器固定连接于履带车的上端,本技术通过导航设备的协作下导航到指定地点,完成自动作业或远程操作,可替代人工作业,通过关节机械臂的设置可以很好的解决因喷漆面位置高不安全、作业面积大劳动强度大的问题,而且可以大大地增加工作效率,通过升降驱动机构和升降套的设置可以控制关节机械臂的升降,从而喷枪夹持机构可以喷至更高的喷漆面,可以解决现有技术中的因喷漆面位置高不安全、作业面积大劳动强度大的问题,同时解决了人工频繁配漆等待作业的问题。
技术研发人员:彭建国,彭文浩,彭诗伟
受保护的技术使用者:北京东方昊为工业装备有限公司
技术研发日:20210622
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!