一种光伏组件自动镀膜装置控制方法与流程
1.本发明属于光伏材料技术领域,尤其涉及一种光伏组件自动镀膜装置控制方法。
背景技术:
2.太阳能是一种重要的清洁能源,光伏组件是光伏发电系统中的重要组成部件,可将太阳能转化为电能进行利用。入射到光伏组件内的太阳光能量的强度和光伏组件的光电转换效率极大程度地决定了光伏系统的发电量及效率。为了提升光伏组件的太阳能吸收效率,同时维持光伏玻璃组件在户外环境下的增透效果,光伏玻璃组件在出厂前都会喷涂带有减反射及抗污功能的光学膜层。光伏组件一般设置于较为恶劣的环境,存在高温、高湿、盐雾、紫外辐射等不利因素,经过多年的使用,镀膜会由于破损、老化等原因,其减反射性能和自清洁能力大大降低,导致光伏电站的发电效益降低。因此,光伏组件需要定期镀膜维护,以提升光伏系统的工作效率和整体效益。
3.现有光伏组件户外镀膜方式主要包括人工、半自动化装置、喷洒车等方式,镀膜工艺主要包括辊涂法和喷涂法。人工和半自动化装置的镀膜方式操作复杂,对镀膜工作的技术要求较高,工作强度大、成本较高、效率较低,且镀膜厚度不均,镀膜液利用率也不高。喷洒车镀膜方式能提高镀膜效率,但是对施工场地要求较高,不利于山区或沙漠地区,使用施工成本也较高,实施条件受限。
技术实现要素:
4.本发明的目的是克服现有技术中的不足,提供一种光伏组件自动镀膜装置控制方法。
5.这种光伏组件自动镀膜装置,包括控制器、喷涂模组、横梁支架、直线驱动单元和行走机构;行走机构设置在光伏发电组件两端,行走机构包括从动轮和主动轮,从动轮和主动轮通过运动平台连接;光伏发电组件两端的行走机构之间搭建有横梁支架;横梁支架滑动连接直线驱动单元和喷涂模组;运动平台上设有控制器,控制器连接喷涂模组、行走机构和直线驱动单元。
6.作为优选:主动轮连接轮毂电机;从动轮处设有限位轮。
7.作为优选:直线驱动单元包括直线驱动单元运动机构和直线驱动单元电机;直线驱动单元运动机构连接直线驱动单元电机,直线驱动单元运动机构下方与喷涂模组固定连接。
8.作为优选:喷涂模组连接有储液罐,喷涂模组设有多个喷口。
9.作为优选:每套光伏阵列内存在n个光伏发电组件,每个光伏发电组件的宽度均为w;横梁支架位于光伏发电组件的中心。
10.作为优选:控制器内还设有无线通讯和遥控模块。
11.这种光伏组件自动镀膜装置的控制方法,包括以下步骤:
12.s1、在储液罐中盛放适量镀膜液,通过限位轮将镀膜装置固定在光伏组件起始位
置,横梁支架位于光伏组件中心线;
13.s2、系统上电,镀膜装置开始工作;通过控制器命令直线驱动单元与喷涂模组沿横梁支架直线移动,对光伏发电组件喷涂镀膜液;
14.s3、计算已喷涂的光伏发电组件的数量,判断喷涂镀膜流程是否完成。
15.作为优选,步骤s2中:完成当前光伏发电组件的喷涂后,通过控制器命令喷涂模组停止工作,直线驱动单元电机反转,直线驱动单元和喷涂模组沿横梁支架反向移动直至复位;且在直线驱动单元带动喷涂模组沿横梁支架移动的过程中,始终通过传感器检测直线驱动单元与光伏发电组件的相对位置。
16.作为优选,步骤s3具体为:比较已喷涂的光伏发电组件的数量与光伏发电组件的总数量n的大小关系,存在两种情况,分别为:
17.已喷涂的光伏发电组件的数量小于光伏发电组件的总数量n:喷涂镀膜流程未结束,通过控制器命令行走机构发送启动命令,行走机构移动距离w,移动至下一光伏发电组件的中心线,并通过限位轮固定;重复步骤s2~步骤s3,直至已喷涂的光伏发电组件的数量等于光伏组件的总数量n;
18.已喷涂的光伏发电组件的数量等于光伏组件的总数量n:喷涂镀膜流程结束,通过控制器命令喷涂模组、直线驱动单元、行走机构停止工作。
19.本发明的有益效果是:
20.1)本发明通过嵌入式控制系统,并配合直线驱动单元和行走机构,控制设备在光伏组件上自动定位、自动移动,在喷涂过程中无需人为干预,可以自动完成光伏组件自动喷涂,以解决工人通过手动方式移动装置而导致的工作强度大、工作效率低下的问题。
21.2)通过控制器控制喷涂模组,可对喷雾时间、电子喷枪速度、喷枪工作周期等参数进行精确控制,以解决镀膜厚度不均、镀膜液利用率不高的问题。
22.3)控制器内设有无线通讯和遥控模块,使本发明具备可远程监控的特点,可以远程控制镀膜装置启动、停止,同时能接收控制系统上传的上传状态信息、报警信息等数据,以便后台监控和数据统计;也可以分别控制直线驱动单元和行走机构单独移动特定长度的距离。
23.4)本设备安装于光伏组件上,占用空间少,对实施场地的空间要求较低,容易实施。
附图说明
24.图1为光伏组件自动镀膜装置的结构图;
25.图2为控制器连接各硬件的结构图;
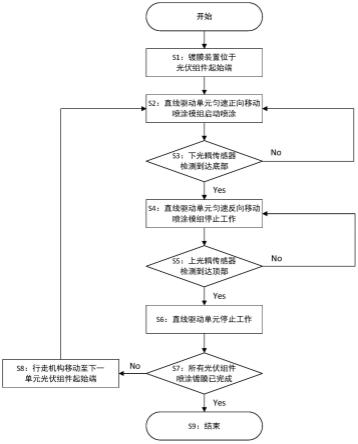
26.图3为光伏组件自动镀膜装置的自动工作流程图;
27.图4为位置-速度双闭环控制原理图;
28.图5为光伏组件自动镀膜装置的另一种自动工作流程图;
29.图6为后台通讯流程图。
30.附图标记说明:从动轮1、运动平台2、主动轮3、横梁支架4、直线驱动单元运动机构5、直线驱动单元电机6、喷涂模组7、限位轮8、控制器9、光伏发电组件10。
具体实施方式
31.下面结合实施例对本发明做进一步描述。下述实施例的说明只是用于帮助理解本发明。应当指出,对于本技术领域的普通人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
32.实施例一
33.作为一种实施例,如图1所示,一种光伏组件自动镀膜装置,主要安装在光伏发电组件10表面,包括控制器9、喷涂模组7、横梁支架4、直线驱动单元和行走机构;每套光伏阵列内存在n个光伏发电组件10,每个光伏发电组件10的宽度均为w;横梁支架4位于光伏发电组件10的中心。行走机构设置在光伏发电组件10两端,行走机构包括从动轮1和主动轮3,从动轮1和主动轮3通过运动平台2连接;主动轮3连接轮毂电机,从动轮1处设有限位轮8。
34.光伏发电组件10两端的行走机构之间搭建有横梁支架4;横梁支架4滑动连接直线驱动单元和喷涂模组7,并采用激光传感器或雷达超声波传感器等传感器进行测距定位;直线驱动单元包括直线驱动单元运动机构5和直线驱动单元电机6;直线驱动单元运动机构5连接直线驱动单元电机6,直线驱动单元运动机构5下方与喷涂模组7固定连接。直线驱动单元的速度为0~5m/s。喷涂模组7连接有储液罐,喷涂模组7设有一组经过优化设计的超声雾化喷头,可以独立控制开关状态,且每个超声雾化喷头都可在支撑支架上移动及固定,实现喷头之间间距可调节、喷涂面积大、喷涂区域可变化的功能,可用于户外大面积光伏组件镀膜。
35.运动平台2上设有控制器9,如图2所示,控制器9内含一控制电路板,控制电路板上安有单片机,单片机通过硬件电路分别控制喷涂模组7、行走机构、直线驱动单元,并可设置工作模式为自动模式或半自动模式。通过wifi模块与pc上位机通讯,接收上位机控制指令,上传相关工作数据、状态数据、报警信息等。
36.实施例二
37.实施例一所给出的光伏组件自动镀膜装置的控制方法,如图3所示,包含以下步骤:
38.s1:开始前,在储液罐中盛放适量镀膜液,将镀膜装置放置并固定在光伏阵列的第一块光伏发电组件10起始位置,横梁支架4位于光伏发电组件10中心线;并选择工作模式为自动模式。
39.s2:对系统上电;系统上电后,首先进行自检流程,检测项如下:
40.a)检测控制器9电源电压是否满足9-16v,如果检测到电压低于正常电压,则红色告警灯亮,并记录控制器电压异常故障码;
41.b)检测行走机构的轮毂电机报警状态,读取轮毂电机报警状态信息并记录故障码,自检流程中检测到任一异常状况,都不会执行遥控设备发布的指令或自动运行的指令,装置亮告警灯和告警音;
42.镀膜装置开始工作,控制器分别给直线驱动单元电机6、喷涂模组7发送启动命令;直线驱动单元搭载在横梁支架4上,沿着横梁支架4直线移动;直线驱动单元搭载喷涂模组7同步移动。
43.其中喷涂模组7所用的喷枪为单流体喷枪、二流体喷枪或者超声喷枪。喷枪口距光伏发电组件10表面15cm,喷枪间距12cm,膜层厚度在20-500nm,膜厚均匀性在10%以内;每
个喷枪的喷幅在10cm以上,雾化直径为20~50μm,喷嘴的出口直径为1~2mm,喷雾角度为45~90
°
。直线驱动单元移动速度可以通过控制器进行分档控制,速度在0.05m/s、0.3m/s、0.5m/s、0.75m/s、1m/s、1.5m/s、2m/s共七档间调节。单个喷嘴的流量也可通过控制器9进行控制。当直线驱动单元移动速度为0.05~1m/s时,单个喷嘴的流量为0.1l/min;移动速度为1~2m/s时单个喷嘴的流量为0.05l/min。喷涂模组配有微型液滴回收装置,可以通过抽风方式把喷洒在空气中的镀膜液富集回收,提高镀膜液使用率。
44.s3:通过下光耦传感器,控制器9持续检测到是否已到达光伏发电组件10底部。
45.s4:检测到已到达光伏发电组件10底部后,即认为当前单元组件喷伏完成,控制器9给喷涂模组7发送停止工作命令,同时给直线驱动单元电机6发送反转命令,直线驱动单元搭载喷涂模组7,沿着横梁支架4反向移动,直至返回起始位置。
46.s5:通过上光耦传感器,控制器9持续检测到是否已到达光伏发电组件10顶部。
47.s6:检测到已到达光伏发电组件10顶部后,控制器9向直线驱动单元电机6发送停止转动命令。
48.s7:如果已完成喷涂的组件数量小于光伏发电组件10数量n,则进行s8;如果已完成喷涂的组件数量达到光伏发电组件10数量n,则整个光伏阵列喷涂镀膜流程完成。
49.s8:行走机构搭载整个装置,由控制器给轮毂电机发送启动命令,移动距离为w,移动至下一单元光伏发电组件10中心线,然后返回s2,重复上述流程,直至整个光伏阵列喷涂镀膜流程完成;
50.如图4所示,轮毂电机和直线驱动单元电机6采用位置-速度双闭环pid算法进行控制。通过控制器9中的电机编码器检测电机速度,通过积分运算获得直线驱动单元电机6的位置信息。位置外环控制器,求出控制输出量,作为速度内环的控制目标值。速度内环控制器求出速度控制输出量,作为直线驱动单元电机6驱动器的输入。
51.s9:整个镀膜流程结束,控制器9给喷涂模组7、直线驱动单元、行走机构发送停止工作命令。每次喷涂施工结束后,需要将系统电源断电,收回电缆、气管,将剩余镀膜液倒回原桶并放到指定区间。将施工物品分类、整理、装箱,分门别类,整齐摆放。
52.在喷涂作业过程中,作业人员要不断、仔细观察喷枪运行以及出液状态,发现异常后要在喷涂台移动到最近喷涂节点时,再停掉喷涂台及气源,处理异常状况,恢复正常后对异常喷涂区域重新喷涂。如出现异常时,可以按下紧急停止按钮。异常状况解决后,重新启动系统,机器人会启动断点续航功能,根据之前的作业记录,判断未完成喷涂的光伏发电组件10的数量,从上次紧急停止处继续作业,直至完成整个光伏阵列的喷涂作业。
53.实施例三
54.如图5所示,基于实施例一所提出的一种光伏发电组件10自动镀膜装置,和实施例二提出的这种光伏发电组件10自动镀膜装置的控制方法,本实施例还给出了这种光伏发电组件10自动镀膜装置的另一种控制方法:
55.采用激光传感器或雷达超声波传感器等传感器进行测距定位,当直线驱动单元运行到光伏发电组件10下边沿时,即认为当前单元组件喷涂完成,直线驱动单元停止,行走机构平移至下一单元光伏发电组件10末端,再使直线驱动单元反向移动工作,继续喷涂;当激光传感器检测到上边沿时,直线驱动单元停止;行走机构再次平移至下一单元光伏发电组件10顶端;重复以上流程工作,直线驱动单元带动喷涂模组7呈z字移动喷涂,直至整个光伏
阵列喷涂完成。
56.实施例四
57.作为另一种实施例,实施例一提出的光伏发电组件10自动镀膜装置,还可以进行半自动的远程遥控喷涂。
58.通过控制器9连接的无线通讯与遥控模块,可通过无线遥控装置控制系统执行相关操作,具体步骤为:配置系统工作模式为半自动工作模式,然后系统等待接收遥控装置指令,接收到指令后,再执行对应的操作。
59.无线遥控装置包括带有摇杆的无线遥控装置和与所述无线遥控装置相匹配的无线接收装置,所述无线接收装置与控制器相连。可通过无线遥控装置对机器人进行启动、停止、前、后、左、右方向及运行速度控制。控制器接收并执行无线遥控装置发送的相关指令。不再通过光耦传感器检测直线驱动单元是否到达横梁支架4的顶端或底端,而是由工程作业人员直接控制直线驱动单元的运行方向。
60.同时控制器9把相关数据上传至后台,方便后台工作人员进行状态监测、数据统计和分析;控制器9与后台服务器之间采用wifi通讯模块作为传输媒介,利用网络透传模式进行数据交互。
61.本系统硬件和云平台之间的数据交互主要分为云平台命令下发、镀膜装置数据上传两大类。
62.镀膜装置数据上传:镀膜装置控制器把设备参数、故障信息、定位信息、作业信息,按照“命令,字段1,字段2
···
字段n,校验码”的形式,将需要发送的数据进行封装上传至云平台,平台数据库把相关数据存储至数据库。
63.云平台命令下发,也按照“命令,字段1,字段2
···
字段n,校验码”的形式,把控制命令发送给控制器9,并执行相关控制动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1