一种移液装置以及移液工作站的制作方法
本发明涉及生化检测,特别涉及一种移液装置以及移液工作站。
背景技术:
1、生物化学检测通常涉及多反应、多工位协作,例如时空组学,涉及透化、抽废液、逆转录、组织去除、产物回收、清洗等多中生化反应,因此,将各反应、各工位集成于自动化系统中具有重要的应用价值。自动化系统中最为核心的部件就是移液装置,现有移液装置要么只有移液功能,自动化进程中仍需要人为干预转换工位,要么移液清洗等多功能共用,交替工作,自动化进程耗时长,不能同时进行多个反应,即,目前的移液装置会导致自动化进程效率低、生化反应通量低,无法满足生化检测,尤其是时空组学发展的需要。
技术实现思路
1、本发明的目的之一在于提供一种移液装置,以提高自动化进程效率,缩短自动化进程耗时,满足执行需求。
2、本发明的另一目的在于提供一种包括上述移液装置的移液工作站。
3、为实现上述目的,本发明提供如下技术方案:
4、一种移液装置,包括:
5、能够沿三维方向移动的移液模块,所述移液模块用于取放tip头并将样本液体从第一容器转移至第二容器中以进行生化反应;
6、能够沿三维方向移动的抽废液模块,所述抽废液模块用于抽取所述第二容器中反应后的废液;
7、能够沿三维方向移动的抓取功能模块,所述抓取功能模块能够抓取所述第二容器和/或第二容器盛放的载体。
8、可选地,所述移液模块与所述抽废液模块相互独立地设置,所述抓取功能模块设置于所述抽废液模块。
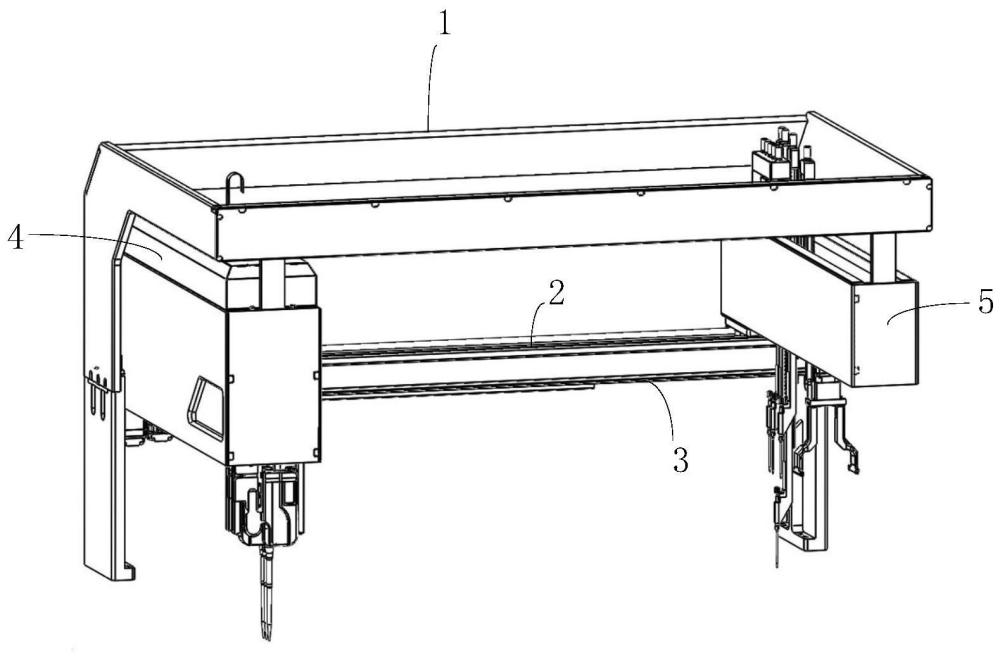
9、可选地,还包括框架,所述移液模块可沿三维方向移动地设置于所述框架的第一端,所述抽废液模块可沿三维方向移动地设置于所述框架的第二端。
10、可选地,所述框架设置第一三维驱动机构以及第二三维驱动机构;
11、所述第一三维驱动机构包括第一横向驱动机构、第一纵向驱动机构以及第一竖向驱动机构,所述第一横向驱动机构用于驱动第一壳架沿所述框架长度方向往复移动,所述第一纵向驱动机构以及所述第一竖向驱动机构设置于所述第一壳架,所述第一纵向驱动机构用于驱动所述移液模块沿所述第一壳架的长度方向往复移动,所述第一竖向驱动机构用于驱动所述移液模块升降;
12、所述第二三维驱动机构包括第二横向驱动机构、第二纵向驱动机构以及第二竖向驱动机构,所述第二横向驱动机构用于驱动第二壳架沿所述框架长度方向往复移动,所述第二纵向驱动机构以及所述第二竖向驱动机构设置于所述第二壳架,所述第二纵向驱动机构用于驱动所述抽废液模块沿所述第二壳架的长度方向往复移动,所述第二竖向驱动机构用于驱动所述抽废液模块升降。
13、可选地,所述第一竖向驱动机构的各个驱动端分别与所述移液模块的各个移液枪头连接以使各个所述移液枪头相互独立地升降;
14、所述第二竖向驱动机构的各个驱动端分别与所述抽废液模块的各个抽取件连接以使各个所述抽取件相互独立地升降。
15、可选地,所述移液模块的移液枪头的数量大于或等于所述第二容器一排的反应孔位数;
16、所述抽废液模块的抽取件的数量大于或等于所述第二容器一排的反应孔位数。
17、可选地,所述第一横向驱动机构包括第一横向驱动电机以及第一同步带机构,所述第一同步带机构包括第一主动轮、第一从动轮以及第一同步带,所述第一主动轮与所述第一从动轮分别可转动地设置于所述框架的两端,所述第一主动轮与所述第一横向驱动电机传动连接,所述第一同步带绕设于所述第一主动轮以及所述第一从动轮,所述第一壳架与所述第一同步带连接;
18、所述第二横向驱动机构包括第二横向驱动电机以及第二同步带机构,所述第二同步带机构包括第二主动轮、第二从动轮以及第二同步带,所述第二主动轮与所述第二从动轮分别可转动地设置于所述框架的两端,所述第二主动轮与所述第二横向驱动电机传动连接,所述第二同步带绕设于所述第二主动轮以及所述第二从动轮,所述第二壳架与所述第二同步带连接。
19、可选地,所述抽废液模块移动一个行程的耗时少于所述移液模块移动一个行程的耗时。
20、可选地,所述抓取功能模块包括夹爪模块和/或吸附模块。
21、可选地,所述夹爪模块包括夹爪以及夹爪驱动装置,所述夹爪包括多个可相互聚拢或散开的爪部,各所述爪部设置于所述夹爪驱动装置的驱动端,所述夹爪驱动装置驱动各所述爪部相互聚拢或散开。
22、可选地,所述吸附模块包括负压装置以及吸盘,所述吸盘设置于所述负压装置的输出端。
23、一种移液工作站,包括如上任意一项所述的移液装置。
24、由以上技术方案可以看出,本发明中公开了一种移液装置包括移液模块、抽废液模块以及抓取功能模块,其中,移液模块、抽废液模块以及抓取功能模块这三者均能够沿三维方向移动,三维方向包括水平面内的横向和纵向以及垂直于地面的竖向,移液模块用于取放tip头并将样本液体从第一容器转移至第二容器中以进行生化反应,抽废液模块用于抽取第二容器中反应后的废液,抓取功能模块能够抓取第二容器和/或第二容器盛放的载体;可见上述移液装置的移液模块、抽废液模块以及抓取功能模块均可以实现三维移动,移液模块进行样本液体的转移,抽废液模块用于抽取反应后的废液,抓取功能模块可以转移第二容器和/或第二容器盛放的载体,三者互不干扰,可以在转移样本液体的同时,进行抽废液或者第二容器和/或载体的转移,从而提高自动化进程效率,能够大大缩短自动化进程耗时,进而满足执行需求。
25、本发明还提供了一种移液工作站,该移液工作站包括如上所述的移液装置,由于该移液工作站采用了上述移液装置,因此移液工作站理应具有相同的有益效果,在此不再赘述。
技术特征:
1.一种移液装置,其特征在于,包括:
2.根据权利要求1所述的移液装置,其特征在于,所述移液模块与所述抽废液模块相互独立地设置,所述抓取功能模块设置于所述抽废液模块。
3.根据权利要求1或2所述的移液装置,其特征在于,还包括框架,所述移液模块可沿三维方向移动地设置于所述框架的第一端,所述抽废液模块可沿三维方向移动地设置于所述框架的第二端。
4.根据权利要求3所述的移液装置,其特征在于,所述框架设置第一三维驱动机构以及第二三维驱动机构;
5.根据权利要求4所述的移液装置,其特征在于,所述第一竖向驱动机构的各个驱动端分别与所述移液模块的各个移液枪头连接以使各个所述移液枪头相互独立地升降;
6.根据权利要求5所述的移液装置,其特征在于,所述移液模块的移液枪头的数量大于或等于所述第二容器一排的反应孔位数;
7.根据权利要求4所述的移液装置,其特征在于,所述第一横向驱动机构包括第一横向驱动电机以及第一同步带机构,所述第一同步带机构包括第一主动轮、第一从动轮以及第一同步带,所述第一主动轮与所述第一从动轮分别可转动地设置于所述框架的两端,所述第一主动轮与所述第一横向驱动电机传动连接,所述第一同步带绕设于所述第一主动轮以及所述第一从动轮,所述第一壳架与所述第一同步带连接;
8.根据权利要求3所述的移液装置,其特征在于,所述抽废液模块移动一个行程的耗时少于所述移液模块移动一个行程的耗时。
9.根据权利要求1、2及4-8任意一项所述的移液装置,其特征在于,所述抓取功能模块包括夹爪模块和/或吸附模块。
10.根据权利要求9所述的移液装置,其特征在于,所述夹爪模块包括夹爪以及夹爪驱动装置,所述夹爪包括多个可相互聚拢或散开的爪部,各所述爪部设置于所述夹爪驱动装置的驱动端,所述夹爪驱动装置驱动各所述爪部相互聚拢或散开。
11.根据权利要求10所述的移液装置,其特征在于,所述吸附模块包括负压装置以及吸盘,所述吸盘设置于所述负压装置的输出端。
12.一种移液工作站,其特征在于,包括如权利要求1-11任意一项所述的移液装置。
技术总结
本发明涉及一种移液装置以及移液工作站,该移液装置包括移液模块、抽废液模块以及抓取功能模块,其中,移液模块、抽废液模块以及抓取功能模块这三者均能够沿三维方向移动,三维方向包括水平面内的横向和纵向以及垂直于地面的竖向,移液模块用于取放TIP头并将样本液体从第一容器转移至第二容器中以进行生化反应,抽废液模块用于抽取第二容器中反应后的废液,抓取功能模块能够抓取第二容器和/或第二容器盛放的载体;可见上述移液装置的三个模块互不干扰,可以在转移样本液体的同时,进行抽废液或者第二容器及载体的转移,从而提高自动化进程效率,能够大大缩短自动化进程耗时,进而满足执行需求。
技术研发人员:雷睿鸣,邝皓妍,洪艳,于群,黎宇翔,陈奥
受保护的技术使用者:深圳华大生命科学研究院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!