一种具有类人工作模式的双臂涂胶机器人的制作方法
本发明涉及机器人,特别是涉及一种具有类人工作模式的双臂涂胶机器人。
背景技术:
1、随着我国经济建设的迅速发展,涂胶行业有定制化、多样化、智能化需要的特点。由于人工成本提高,工作质量重复难度大,工人劳动强度大,厂房配置变化大,而且涂胶物料味道对人的身体有伤害,因此,从经济性和安全性考虑,需要一种涂胶机器人。
2、而现有的涂胶机器人均为单臂机器人,如专利号为201880087315.0的中国专利公开的一种涂胶机器人。单臂的涂胶机器人在工作时,不能像人一样,灵活的利用双手对工件进行转动、移动、按压固定等操作,均需要用夹具对工件进行固定。且在涂胶的过程中,涂胶方式单一,基本只能沿前后、左右等平面上的轨迹进行涂胶。
3、因此,需要一种拟人化、能适应不同涂胶工作的机器人。
技术实现思路
1、本发明所要解决的技术问题,就是提供一种具有类人工作模式的双臂涂胶机器人,其适应能力强、运动灵活,具有类人工作业模式。
2、解决上述技术问题,本发明采用的技术方案如下:
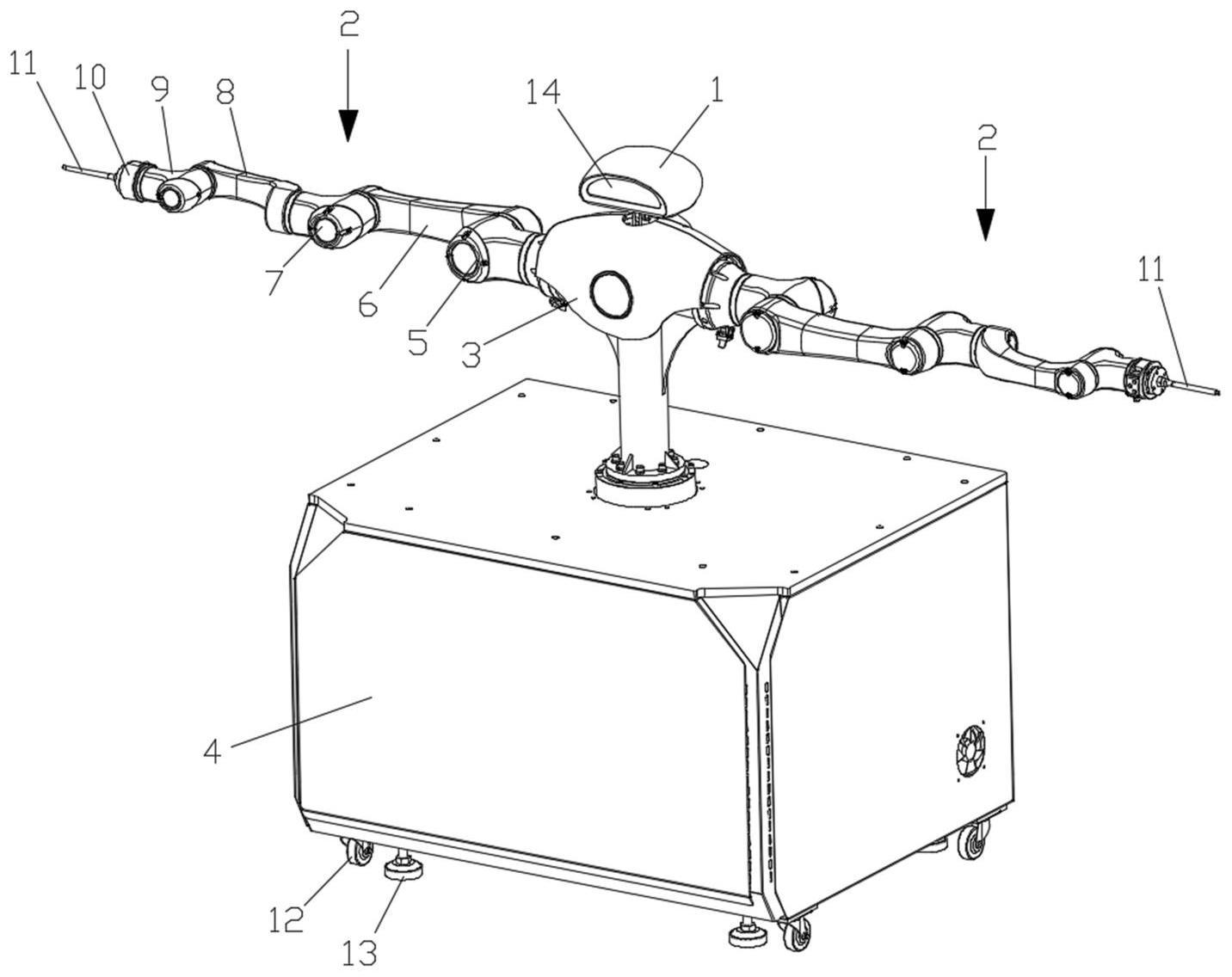
3、一种具有类人工作模式的双臂涂胶机器人,其特征在于:包括移动台和设在移动台上面的机器人本体,机器人本体包括躯干、头部和两条机械臂,躯干转动设在移动台的上面,头部转动设在躯干的上端,两条机械臂分别连接在躯干的左右两侧,机械臂的前端用于安装工具;
4、双臂涂胶机器还包括视觉系统和力矩保护系统;视觉系统的摄像机设在头部,视觉系统将摄像机拍摄的工件照片进行处理,获得空间模型,从而得到涂胶的轨迹和每条涂胶边的长度;力矩保护系统实时监测机械臂的转轴的力矩,通过力矩判断机械臂与外物的碰撞情况,当与外物发生碰撞时,机械臂停止运动;
5、双臂涂胶机器人通过其中一条机械臂提起工件、另一条机械臂进行涂胶的方式进行涂胶工作,或者其中一条机械臂按压工件、另一条机械臂进行涂胶的方式进行涂胶工作,或者两条机械臂同时进行涂胶的方式进行涂胶工作。
6、可选的,机械臂为六轴机械臂。
7、可选的,机械臂包括第一直角臂、第一臂杆、第二直角臂、第二臂杆、第三直角臂和六个转轴,第一直角臂、第一臂杆、第二直角臂、第二臂杆和第三直角臂通过转轴依次转动连接,第一直角臂还通过转轴与躯干连接,第三直角臂的前端通过转轴安装有工具连接头,所示工具连接头用于安装工具。
8、可选的,双臂涂胶机器还包括示教系统,示教系统将人手拖动机械臂行进的路线转为涂胶轨迹。
9、可选的,示教系统启动后,当人手拖动机械臂行进时,示教系统控制克服机械臂的关节转动时的阻力,以达到零阻力示教。
10、可选的,双臂涂胶机器设有断电锁定机构,当双臂涂胶机器在运行过程中断电时,断电锁定机构锁定两条机械臂。
11、可选的,双臂涂胶机器人的控制总成设在移动台内。
12、可选的,移动台的下面设有脚轮和脚杯。
13、与现有技术相比,本发明具有以下有益效果:
14、本发明的涂胶机器人设置了两条机械臂,其通过其中一条机械臂提起工件、另一条机械臂进行涂胶的方式进行涂胶工作,或者其中一条机械臂按压工件、另一条机械臂进行涂胶的方式进行涂胶工作,或者两条机械臂同时进行涂胶的方式进行涂胶工作。本发明的涂胶机器人通过两条机械臂的协调,能更好的像人一样进行涂胶工作,适应能力强、运动灵活。本发明的涂胶机器人适应混产工况,解决了现有的单臂机器人只有单一工作方式,无法举高工件对底部进行涂胶,或者需要借用外部装具固定或举高工件,而且在混合生产时,对不同尺寸的工件和涂胶方式的切换,只能停下来更换装具。
15、本发明的涂胶机器人在工作过程中,如果与工人相撞,通过力矩保护系统控制机械臂停止,使用更安全,所以可以与工人在同一个安全协作区域交叠工作,与工人一同工作,使得本发明的涂胶机器人能更好的嵌入到不同工位中。本发明的涂胶机器人解决了现有涂胶机器人需要将工人和机器人的活动区完全分离,需要烦琐的加装护栏等问题。
16、本发明的涂胶机器人的躯干为转动设置,使得两条机械臂的可达范围更广,也即提高了涂胶的范围。
17、本发明的涂胶机器人的头部为转动设置,使得视觉系统的摄像机将可以360度随意拍摄,更加灵活。
技术特征:
1.一种具有类人工作模式的双臂涂胶机器人,其特征在于:包括移动台和设在所述移动台上面的机器人本体,所述机器人本体包括躯干、头部和两条机械臂,所述躯干转动设在所述移动台的上面,所述头部转动设在所述躯干的上端,两条所述机械臂分别连接在所述躯干的左右两侧,所述机械臂的前端用于安装工具;
2.根据权利要求1所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述机械臂为六轴机械臂。
3.根据权利要求2所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述机械臂包括第一直角臂、第一臂杆、第二直角臂、第二臂杆、第三直角臂和六个转轴,所述第一直角臂、第一臂杆、第二直角臂、第二臂杆和第三直角臂通过所述转轴依次转动连接,所述第一直角臂还通过所述转轴与所述躯干连接,所述第三直角臂的前端通过所述转轴安装有工具连接头,所示工具连接头用于安装工具。
4.根据权利要求1所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述双臂涂胶机器还包括示教系统,所述示教系统将人手拖动所述机械臂行进的路线转为涂胶轨迹。
5.根据权利要求4所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述示教系统启动后,当人手拖动所述机械臂行进时,所述示教系统控制克服所述机械臂的关节转动时的阻力,以达到零阻力示教。
6.根据权利要求1所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述双臂涂胶机器设有断电锁定机构,当所述双臂涂胶机器在运行过程中断电时,所述断电锁定机构锁定两条所述机械臂。
7.根据权利要求1所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述双臂涂胶机器人的控制总成设在所述移动台内。
8.根据权利要求1所述的具有类人工作模式的双臂涂胶机器人,其特征在于:所述移动台的下面设有脚轮和脚杯。
技术总结
本发明公开了一种具有类人工作模式的双臂涂胶机器人,其包括移动台、机器人本体、视觉系统和力矩保护系统,机器人本体包括躯干、头部和两条机械臂,机械臂的前端用于安装工具;视觉系统的摄像机设在头部,视觉系统将摄像机拍摄的工件照片进行处理,获得空间模型,从而得到涂胶的轨迹和每条涂胶边的长度;力矩保护系统实时监测机械臂的转轴的力矩,通过力矩判断机械臂与外物的碰撞情况,当与外物发生碰撞时,机械臂停止运动。本发明具有类人工作模式的双臂涂胶机器人,其适应能力强、运动灵活,具有类人工作业模式。
技术研发人员:江子杰,陆宏杰,王宏宽,叶金培,徐琴峰
受保护的技术使用者:中国电器科学研究院股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!