一种除尘系统、卸灰控制方法和装置与流程
本申请涉及卸灰控制的,尤其涉及一种除尘系统、卸灰控制方法和装置。
背景技术:
1、炼钢工艺中需要将含尘气体除尘后再排放,以防止对环境造成破坏。例如转炉炼钢中的二次除尘系统是其重要组成部分,对转炉正常冶炼周期和环境指标具有较大影响,因而需要除尘系统长期稳定运行。二次除尘系统的主要设备有斗提机、刮板、卸灰阀等设备组成。炼钢厂投入二次除尘系统以来,由于环保形式的严峻性和生产节奏的紧张性,对于二次除尘的稳定运行要求越来越严格。但是目前在日常生产过程中,操作人员只能通过手动操作设备,操作较为繁琐,导致操作故障的频次较多。主要是操作人员需逐个手动启停除尘系统设备,并由于操作工手动操作不熟,导致现场设备频繁堵灰或卸灰阀操作失效等情况,影响正常除尘系统的使用。
2、因此,如何提高除尘系统上卸灰控制的可靠性,是目前亟待解决的技术问题。
技术实现思路
1、本发明的一种除尘系统、卸灰控制方法和装置,能够提高除尘系统上卸灰控制的可靠性。
2、本发明实施例提供了以下方案:
3、第一方面,本发明实施例提供了一种卸灰控制方法,应用于除尘系统上的卸灰控制,所述除尘系统包括多个并列安装的除尘器,所述方法包括:
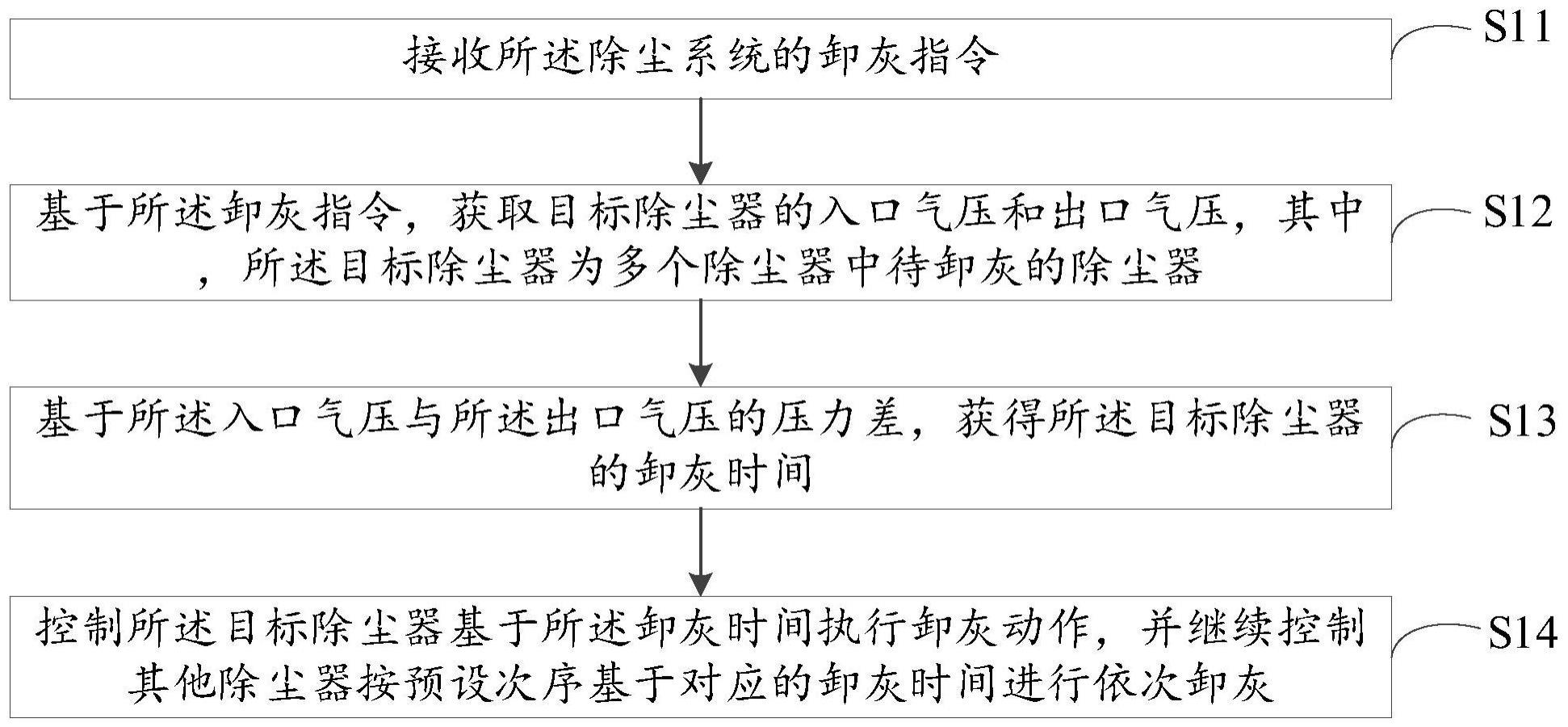
4、接收所述除尘系统的卸灰指令;
5、基于所述卸灰指令,获取目标除尘器的入口气压和出口气压,其中,所述目标除尘器为多个除尘器中待卸灰的除尘器;
6、基于所述入口气压与所述出口气压的压力差,获得所述目标除尘器的卸灰时间;
7、控制所述目标除尘器基于所述卸灰时间执行卸灰动作,并继续控制其他除尘器按预设次序基于对应的卸灰时间进行依次卸灰。
8、在一种可选的实施例中,所述基于所述入口气压与所述出口气压的压力差,获得所述目标除尘器的卸灰时间,包括:
9、根据所述压力差和预设的多个压力区间,确定所述压力差的目标压力区间;
10、将所述目标压力区间对应的设定时间,确定为所述卸灰时间。
11、在一种可选的实施例中,所述控制所述目标除尘器基于所述卸灰时间执行卸灰动作之前,还包括:
12、判断所述压力差是否大于设定限值;
13、若是,则输出所述目标除尘器的第一告警信息。
14、在一种可选的实施例中,所述除尘系统还包括斗提机、集合刮板机和至少一台卸灰刮板机,所述卸灰刮板机用于收集多个除尘器排出的灰尘,所述集合刮板机用于将至少一台所述卸灰刮板机的收集灰尘输出至所述斗提机的输入口,所述斗提机用于将所述集合刮板机输出的灰尘输送至预设的目标位置;所述接收所述除尘系统的卸灰指令之后,所述方法还包括:
15、基于所述卸灰指令启动所述斗提机,并确定是否接收到所述斗提机输出的第一反馈信号;
16、在接收到所述第一反馈信号时控制所述集合刮板机启动,并确定是否接收到所述集合刮板机输出的第二反馈信号;
17、在接收到所述第二反馈信号时控制所述卸灰刮板机启动。
18、在一种可选的实施例中,所述控制所述卸灰刮板机启动之后,还包括:
19、获取运行设备的单圈标定时长和单圈运行时长,其中,所述运行设备为所述斗提机、所述集合刮板机和所述卸灰刮板机中的任一设备;
20、在所述单圈标定时长与所述单圈运行时长的差值大于预设差值时,输出所述运行设备的第二告警信息。
21、在一种可选的实施例中,所述运行设备上设有检测其链轨循环转动的位置传感器,所述获取运行设备的单圈标定时长,包括:
22、获取所述位置传感器的一次触发信号;
23、基于所述一次触发信号对时间寄存器清零处理并进行计时;
24、基于所述位置传感器的二次触发信号提取所述时间寄存器的计时时长,将所述计时时长确定为所述单圈标定时长。
25、第二方面,本发明实施例还提供了一种除尘系统,所述除尘系统经第一方面中任一所述的方法进行卸灰控制。
26、第三方面,本发明实施例还提供了一种卸灰控制装置,应用于除尘系统上的卸灰控制,所述除尘系统包括多个并列安装的除尘器,所述装置包括:
27、接收模块,用于接收所述除尘系统的卸灰指令;
28、第一获取模块,用于基于所述卸灰指令,获取目标除尘器的入口气压和出口气压,其中,所述目标除尘器为多个除尘器中待卸灰的除尘器;
29、获得模块,用于基于所述入口气压与所述出口气压的压力差,获得所述目标除尘器的卸灰时间;
30、第一控制模块,用于控制所述目标除尘器基于所述卸灰时间执行卸灰动作,并继续控制其他除尘器按预设次序基于对应的卸灰时间进行依次卸灰。
31、第四方面,本发明实施例还提供了一种电子设备,包括处理器和存储器,所述存储器耦接到所述处理器,所述存储器存储指令,当所述指令由所述处理器执行时使所述电子设备执行第一方面中任一项所述方法的步骤。
32、第五方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面中任一项所述方法的步骤。
33、本发明的一种除尘系统、卸灰控制方法和装置与现有技术相比,具有以下优点:
34、本发明的卸灰控制方法,应用于除尘系统上的卸灰控制,除尘系统包括多个并列安装的除尘器,控制方法通过接收除尘系统的卸灰指令,基于所述卸灰指令,获取目标除尘器的入口气压和出口气压,基于所述入口气压与所述出口气压的压力差,可以准确获得目标除尘器的卸灰时间,再控制所述目标除尘器基于所述卸灰时间执行卸灰动作,并继续控制其他除尘器按预设次序基于对应的卸灰时间进行依次卸灰,使除尘系统可以自动高效的执行卸灰,进而提高了除尘系统卸灰控制的可靠性。
技术特征:
1.一种卸灰控制方法,其特征在于,应用于除尘系统上的卸灰控制,所述除尘系统包括多个并列安装的除尘器,所述方法包括:
2.根据权利要求1所述的除尘系统的控制方法,其特征在于,所述基于所述入口气压与所述出口气压的压力差,获得所述目标除尘器的卸灰时间,包括:
3.根据权利要求1所述的除尘系统的控制方法,其特征在于,所述控制所述目标除尘器基于所述卸灰时间执行卸灰动作之前,还包括:
4.根据权利要求1所述的除尘系统的控制方法,其特征在于,所述除尘系统还包括斗提机、集合刮板机和至少一台卸灰刮板机,所述卸灰刮板机用于收集多个除尘器排出的灰尘,所述集合刮板机用于将至少一台所述卸灰刮板机的收集灰尘输出至所述斗提机的输入口,所述斗提机用于将所述集合刮板机输出的灰尘输送至预设的目标位置;所述接收所述除尘系统的卸灰指令之后,所述方法还包括:
5.根据权利要求4所述的除尘系统的控制方法,其特征在于,所述控制所述卸灰刮板机启动之后,还包括:
6.根据权利要求5所述的除尘系统的控制方法,其特征在于,所述运行设备上设有检测其链轨循环转动的位置传感器,所述获取运行设备的单圈标定时长,包括:
7.一种除尘系统,其特征在于,所述除尘系统经权利要求1-6任一所述的方法进行卸灰控制。
8.一种卸灰控制装置,其特征在于,应用于除尘系统上的卸灰控制,所述除尘系统包括多个并列安装的除尘器,所述装置包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器耦接到所述处理器,所述存储器存储指令,当所述指令由所述处理器执行时使所述电子设备执行权利要求1-6中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。
技术总结
本发明公开了一种除尘系统、卸灰控制方法和装置,卸灰控制方法应用于除尘系统上的卸灰控制,除尘系统包括多个并列安装的除尘器,控制方法通过接收除尘系统的卸灰指令,基于所述卸灰指令,获取目标除尘器的入口气压和出口气压,基于所述入口气压与所述出口气压的压力差,可以准确获得目标除尘器的卸灰时间,再控制所述目标除尘器基于所述卸灰时间执行卸灰动作,并继续控制其他除尘器按预设次序基于对应的卸灰时间进行依次卸灰,使除尘系统可以自动高效的执行卸灰,进而提高了除尘系统卸灰控制的可靠性。
技术研发人员:王瑞华,王海龙,李自强,赵嘉华,柏树望,李浩源,刘亚盛,赵红纺,石磊磊,赵大伟
受保护的技术使用者:北京首钢自动化信息技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!