一种天车喷涂机器人操作平台的制作方法
1.本实用新型涉及喷涂机器人领域,具体涉及一种天车喷涂机器人操作平台。
背景技术:
2.一些大型工件在制造过程中需要进行喷漆作业,由于工件尺寸大,长达几十米,甚至上百米,造成喷涂工作量大,传统的方式为人工喷涂,效率低下。
技术实现要素:
3.本实用新型的目的是提供一种天车喷涂机器人操作平台。
4.本实用新型通过如下技术方案实现上述目的:一种天车喷涂机器人操作平台,包括两个平行的机器人桥架、位于机器人桥架两端的两个大车驱动梁,两个大车驱动梁的顶部均设有滑轨,滑轨上设有机器人驱动横梁,机器人驱动横梁沿滑轨运动,机器人驱动横梁安装有z轴伸缩立柱,z轴伸缩立柱安装有机器人操作室和喷涂机器人。
5.进一步的,所述驱动横梁包括横梁框架、安装在横梁框架上的两个伺服电机和两个减速器,伺服电机通过减速器与主动滑轮连接,主动滑轮通过传动带与从动滑轮连接。
6.进一步的,所述z轴伸缩立柱采用电机带动齿轮齿条机构运动。
7.进一步的,所述天车喷涂机器人操作平台还包括两个挂载于机器人桥架上的供漆系统,两个供漆系统分别位于喷涂机器人的两侧。
8.进一步的,所述供漆系统连接有升降机构,升降机构连接有随动机构。
9.与现有技术相比,本实用新型一种天车喷涂机器人操作平台的有益效果是:通过天车移动加上多自由度喷涂机器人的形式,实现了多角度多位置的喷涂,提高了喷涂效率。
附图说明
10.图1是本实用新型的使用场景示意图。
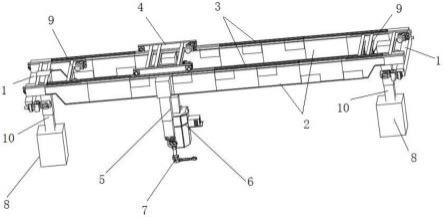
11.图2是本实用新型的结构示意图。
12.图3是本实用新型的俯视示意图。
13.图4是横梁框架的结构示意图。
具体实施方式
14.请参阅图1至图4,一种天车喷涂机器人操作平台100,包括两个平行的机器人桥架2、位于机器人桥架两端的两个大车驱动梁1,两个大车驱动梁1的顶部均设有滑轨3,滑轨3上设有机器人驱动横梁4,机器人驱动横梁4沿滑轨3运动,机器人驱动横梁4安装有z轴伸缩立柱5,z轴伸缩立柱5安装有机器人操作室6和喷涂机器人7。
15.驱动横梁4包括横梁框架45、安装在横梁框架上的两个伺服电机41和两个减速器43,伺服电机41通过减速器43与主动滑轮43连接,主动滑轮43通过传动带(图未示)与从动滑轮44连接,传动带隐藏于横梁框架45内部。通过伺服电机和减速器带动主动滑轮和从动
滑轮运动,从而带动横梁框架沿天车y轴方向的移动。
16.两个大车驱动梁带动天车喷涂机器人操作平台沿天车x轴方向移动,大车驱动梁的结构与驱动横梁类似,不再赘述。
17.z轴伸缩立柱采用电机带动齿轮齿条机构运动的形式,实现机器人操作室和喷涂机器人的升降。
18.天车喷涂机器人操作平台100还包括两个挂载于机器人桥架上的供漆系统8,两个供漆系统8分别位于喷涂机器人7的两侧,供漆系统8连接有升降机构10,升降机构10结构与z轴伸缩立柱5相同,不再赘述,升降机构10连接有随动机构9,随动机构9结构与驱动横梁4相同,不再赘述,随动机构9沿着位于机器人桥架2内的隐藏滑轨(图未示)在天车y轴方向移动,实现随动供漆。这种设置,利用操作人员对供漆系统进行维护,对有利于保证喷漆系统的使用可靠性,防止出现气压不足等情况。进行喷漆作业时,供漆系统上升到安全高度;需要进行加漆作业时,可降低到人工作业高度进行操作。
19.喷涂机器人7为七自由度喷漆机器人,其可沿天车的x、y、z三个轴进行水平的移动,其自身具有七个自由度,可进行空间六自由度的姿态运动。七自由度机器人有更加灵活的运动形式,对被喷涂工件的死角实现90%以上的覆盖喷涂,可大大减少后续人工的补喷工作量,提高工件表面喷涂的一致性,提高喷涂效率。
20.机器人采用倒吊的结构形式,采用全封闭式护罩构造,实现了ip67的环境耐受度,可有效的防水和防尘;在实际应用中,采用耐磨的防护罩进行辅助。
21.本实用新型通过天车移动加上多自由度喷涂机器人的形式,实现了多角度多位置的喷涂,提高了喷涂效率。
22.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
23.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种天车喷涂机器人操作平台,其特征在于:包括两个平行的机器人桥架、位于机器人桥架两端的两个大车驱动梁,两个大车驱动梁的顶部均设有滑轨,滑轨上设有机器人驱动横梁,机器人驱动横梁沿滑轨运动,机器人驱动横梁安装有z轴伸缩立柱,z轴伸缩立柱安装有机器人操作室和喷涂机器人。2.根据权利要求1所述的一种天车喷涂机器人操作平台,其特征在于:所述驱动横梁包括横梁框架、安装在横梁框架上的两个伺服电机和两个减速器,伺服电机通过减速器与主动滑轮连接,主动滑轮通过传动带与从动滑轮连接。3.根据权利要求1所述的一种天车喷涂机器人操作平台,其特征在于:所述z轴伸缩立柱采用电机带动齿轮齿条机构运动。4.根据权利要求1所述的一种天车喷涂机器人操作平台,其特征在于:所述天车喷涂机器人操作平台还包括两个挂载于机器人桥架上的供漆系统,两个供漆系统分别位于喷涂机器人的两侧。5.根据权利要求4所述的一种天车喷涂机器人操作平台,其特征在于:所述供漆系统连接有升降机构,升降机构连接有随动机构。
技术总结
本实用新型一种天车喷涂机器人操作平台,包括两个平行的机器人桥架、位于机器人桥架两端的两个大车驱动梁,两个大车驱动梁的顶部均设有滑轨,滑轨上设有机器人驱动横梁,机器人驱动横梁沿滑轨运动,机器人驱动横梁安装有Z轴伸缩立柱,Z轴伸缩立柱安装有机器人操作室和喷涂机器人。本实用新型通过天车移动加上多自由度喷涂机器人的形式,实现了多角度多位置的喷涂,提高了喷涂效率。提高了喷涂效率。提高了喷涂效率。
技术研发人员:王丹 王玉珍 侯立果
受保护的技术使用者:华东至正工业自动化(常熟)有限公司
技术研发日:2022.04.21
技术公布日:2022/11/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1