一种电池壳自动喷胶工作站的制作方法
本发明涉及扭矩检测校正,具体为一种电池壳自动喷胶工作站。
背景技术:
1、在人工喷涂过程中,需要人工搬运电池包壳体,到喷涂位置进行喷涂,电池包壳体自身的重量及面积较大,人工搬运需要大量的人力资源,不仅费时费力,而且提高了喷涂前的作业成本,而在进行加工的过程中会产生一些少量的有害气体。
技术实现思路
1、针对现有技术的不足,本发明提供了一种电池壳自动喷胶工作站,解决了目前需要人工进行电池壳的搬运,且会有害气体自由扩散的问题。
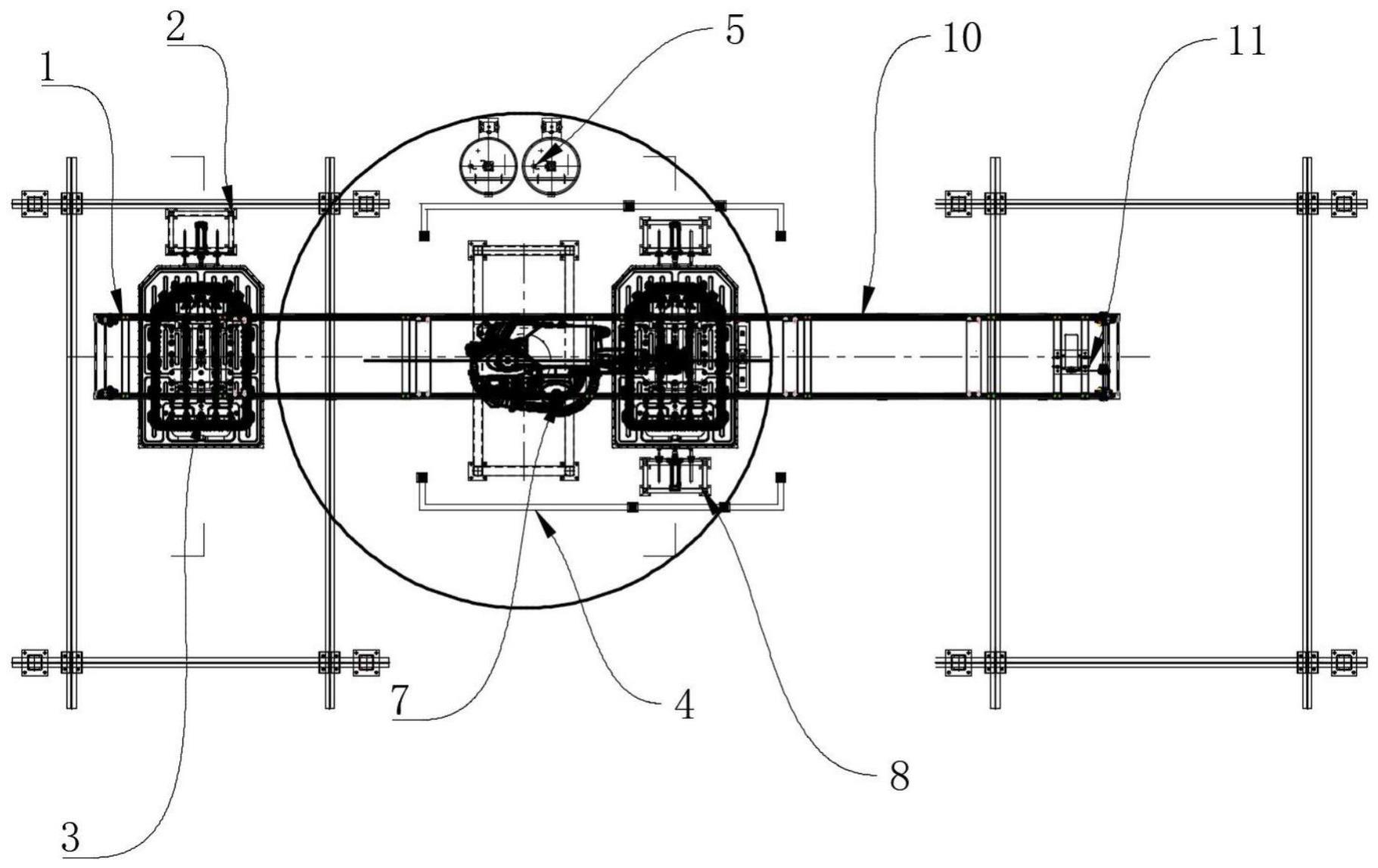
2、为实现以上目的,本发明通过以下技术方案予以实现:一种电池壳自动喷胶工作站,包括电池包壳体、电池包上线工位以及电池包下线工位,电池包上线工位与电池包下线工位之间设置喷涂区,喷涂区的外侧设置机器人区域安全护栏,电池包上线工位安装上线侧顶机,电池包上线工位与电池包下线区域用于运输电池包壳体的路径上设置输送线体,喷涂区包括喷涂机器人以及对电池包壳体形成定位的喷胶侧顶机、阻挡机构以及顶升机构,三者形成对电池包壳体位置的调整,机器人区域安全护栏的顶部位置设置喷头,喷头安装端设置喷气管。
3、进一步的,喷胶机器人的底部设置机器人框架,机器人框架用于将涂胶机器人支撑在安装地面上方,喷胶机器人能够延伸至顶升机构的上方。
4、进一步的,机器人区域安全护栏的外侧设置胶泵,胶泵出胶端连通喷胶机器人,用于输送喷涂材料。
5、进一步的,喷涂侧顶机为两侧对称设置,电池包壳体在喷涂时位于喷涂侧顶机的中间位置,顶升机构位于其底部,阻挡机构位于其向电池包下线工位运动的一侧。
6、进一步的,顶升机构的上方设置导风板,导风板固定于机器人区域安全护栏的顶部,且导风板为锥形设置。
7、进一步的,顶升机构的外侧设置集气箱,集气箱顶部开口,且位于导向板的空气流动方向。
8、进一步的,喷头朝向导风板,且喷头与导向板的倾斜面形成夹角。
9、有益效果
10、本发明提供了一种电池壳自动喷胶工作站。与现有技术相比具备以下有益效果:
11、1、电池包壳体由输送线体运行到喷涂区域,喷涂区域左右二端分别布置的二台喷涂侧顶机定位,防止在喷涂作业中电池包壳体出现位置偏差,到达喷涂区域后喷涂机器人会自动进行喷涂作业,并在喷涂结束后,喷涂机器人回到安全位,电池包壳体继续向前输送,其中减少工作环境对人员的伤害,机器人喷涂和人工喷涂相比提升了30%的产量,减少了生产时间,降低了生产成本。
12、2、利用所设置的喷头,在使用的过程中能够利用喷气管的输气来进行一定范围内部的防护,避免在使用的过程中有害气体的扩散,从而能够使有害气体向下沉降进入到集齐箱的内部,经过集气箱的过滤来使有害气体进行初步过滤。
技术特征:
1.一种电池壳自动喷胶工作站,包括电池包壳体、电池包上线工位以及电池包下线工位,电池包上线工位与电池包下线工位之间设置喷涂区,喷涂区的外侧设置机器人区域安全护栏,电池包上线工位安装上线侧顶机,其特征在于:电池包上线工位与电池包下线区域用于运输电池包壳体的路径上设置输送线体,喷涂区包括喷涂机器人以及对电池包壳体形成定位的喷胶侧顶机、阻挡机构以及顶升机构,三者形成对电池包壳体位置的调整,机器人区域安全护栏的顶部位置设置喷头,喷头安装端设置喷气管。
2.根据权利要求1所述的一种电池壳自动喷胶工作站,其特征在于:喷胶机器人的底部设置机器人框架,机器人框架用于将涂胶机器人支撑在安装地面上方,喷胶机器人能够延伸至顶升机构的上方。
3.根据权利要求1所述的一种电池壳自动喷胶工作站,其特征在于:机器人区域安全护栏的外侧设置胶泵,胶泵出胶端连通喷胶机器人,用于输送喷涂材料。
4.根据权利要求1所述的一种电池壳自动喷胶工作站,其特征在于:喷涂侧顶机为两侧对称设置,电池包壳体在喷涂时位于喷涂侧顶机的中间位置,顶升机构位于其底部,阻挡机构位于其向电池包下线工位运动的一侧。
5.根据权利要求1所述的一种电池壳自动喷胶工作站,其特征在于:顶升机构的上方设置导风板,导风板固定于机器人区域安全护栏的顶部,且导风板为锥形设置。
6.根据权利要求5所述的一种电池壳自动喷胶工作站,其特征在于:顶升机构的外侧设置集气箱,集气箱顶部开口,且位于导向板的空气流动方向。
7.根据权利要求5所述的一种电池壳自动喷胶工作站,其特征在于:喷头朝向导风板,且喷头与导向板的倾斜面形成夹角。
技术总结
本发明公开了一种电池壳自动喷胶工作站,包括电池包壳体、电池包上线工位以及电池包下线工位,电池包上线工位与电池包下线工位之间设置喷涂区,喷涂区的外侧设置机器人区域安全护栏,电池包上线工位安装上线侧顶机,电池包上线工位与电池包下线区域用于运输电池包壳体的路径上设置输送线体,喷涂区包括喷涂机器人以及对电池包壳体形成定位的喷胶侧顶机、阻挡机构以及顶升机构,电池包壳体由输送线体运行到喷涂区域,喷涂区域左右二端分别布置的二台喷涂侧顶机定位,防止在喷涂作业中电池包壳体出现位置偏差,到达喷涂区域后喷涂机器人会自动进行喷涂作业,并在喷涂结束后,喷涂机器人回到安全位。
技术研发人员:丁加松,赵伟豪,余油油,马凯
受保护的技术使用者:安徽哈工道一智能制造技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!