自适应曲面屋盖的空间钢结构喷涂变轮距机器人及应用的制作方法
本发明属于机器人,尤其涉及自适应曲面屋盖的空间钢结构喷涂变轮距机器人及应用。
背景技术:
1、由于钢檩条具有导磁性,有研究人员尝试通过设计磁吸式机器人以檩条为导轨进行喷涂作业,但是磁吸式机器人在檩条上行走时会遇到以下两个问题:第一个是檩条沿曲面布置问题,因机器人沿两条檩条轨道行进,檩条所形成的轨面呈现单曲面,造成机器人轮子必须沿曲面行驶,出现了轮子轨面适应性问题;另一方面,檩条间距因设计或施工等原因,形成一定误差,出现了变檩距问题。正因为檩条布置呈曲面、变轨距的现象,导致通过机器人实现檩条喷涂依旧是亟待解决的技术难题。
2、通过上述分析,现有技术存在的问题及缺陷为:现有技术机器人再适应檩条轨道宽度、及曲面的变化作业中稳定性差。而且不能够适应檩条轨道宽度的变化及檩条曲面布置的变化需求。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了自适应曲面屋盖的空间钢结构喷涂变轮距机器人及应用。
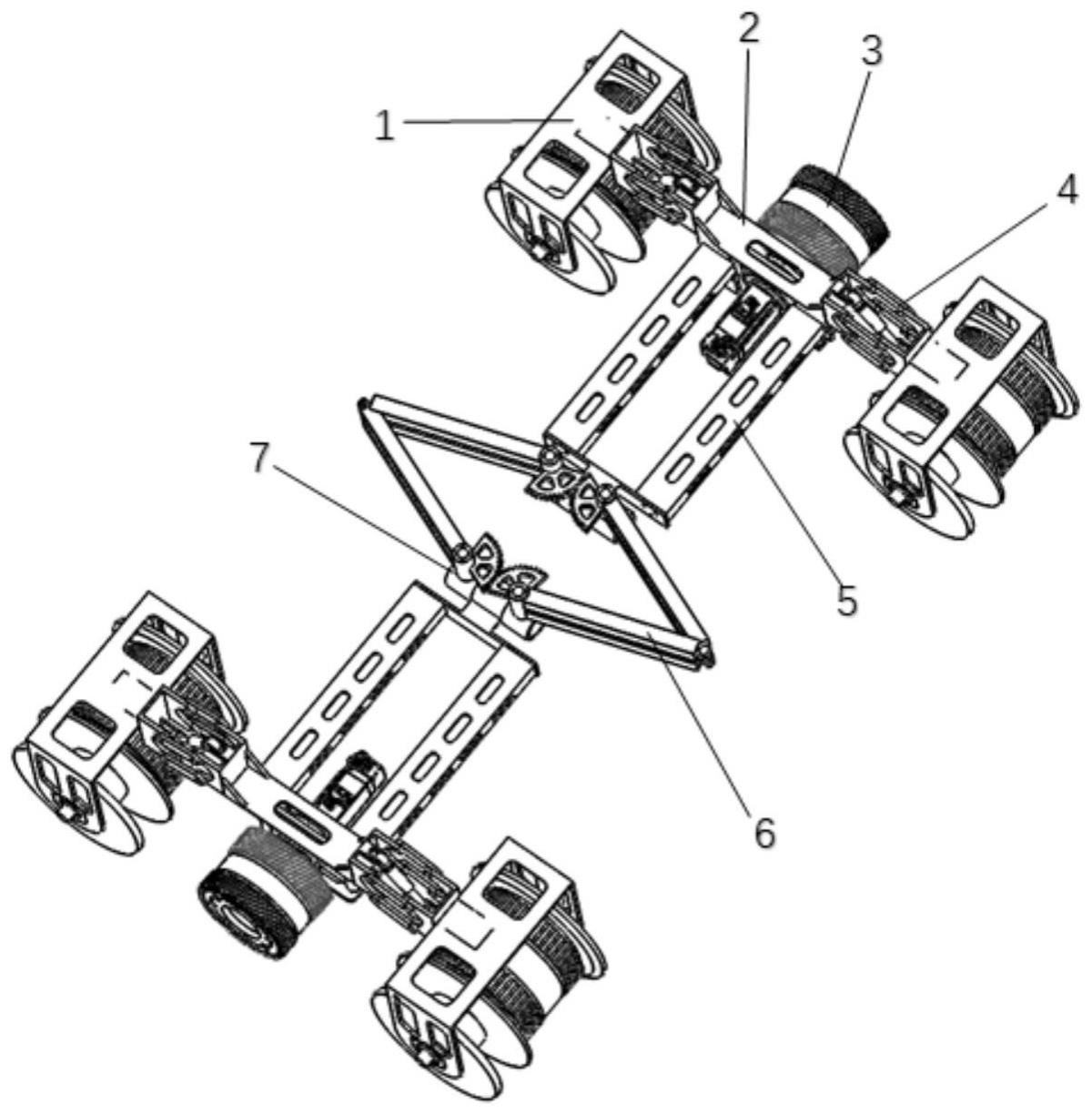
2、所述技术方案如下:一种自适应曲面屋盖的空间钢结构喷涂变轮距机器人,所述自适应曲面屋盖的空间钢结构喷涂变轮距机器人的车体沿轨道横截面分为左右对称的两部分,所述左右两部分均设置有被动轮部件、动力电机支撑平台、带磁动力轮部件、带减振平行四边形机构、横向开合机构、转动铰轴;
3、左右两部分之间设置有横向开合机构,使车体随檩条间距变化相应开合;
4、所述被动轮部件用于被动在导轨上磁吸行走;
5、所述动力电机支撑平台用于根据喷涂作业需求进行多被动轮部件带磁动力轮部件悬挂;
6、所述带磁动力轮部件用于主动为在导轨上主动磁吸行走通过动力;
7、所述带减振平行四边形机构用于为被动轮部件适应导轨曲面行走提供不同的角度;
8、所述横向开合机构,用于通过集成的同步转动月牙齿轮进行横向同步齿轮开合;
9、所述转动铰轴用于匹配导轨曲面曲度,进行适应调整。
10、在一个实施例中,所述被动轮部件包括:被动磁轮马鞍架;所述被动磁轮马鞍架通过轮轴依次套装有被动磁轮外封板、被动磁轮橡胶轮a、被动磁轮轭铁a;被动磁轮磁环及外包轭铁、被动磁轮轭铁b、被动磁轮橡胶轮b、被动磁轮可沿轮轴滑动封板、被动磁轮外侧限位板。
11、在一个实施例中,所述被动轮部件通过被动磁轮马鞍架与平行四边形机构连接;
12、被动磁轮可沿轮轴滑动封板与被动磁轮外侧限位板之间压有弹簧,用于使被动磁轮可沿轮轴滑动封板在轨宽变化时随轮轴滑动。
13、在一个实施例中,所述动力电机支撑平台包括:动力轮支撑架、动力轮驱动电机带减振固定架;所述动力轮驱动电机带减振固定架套装在动力轮支撑架上;
14、所述动力轮支撑架上通过带减振平行四边形机构连接被动轮部件;所述动力轮驱动电机带减振固定架通过开设的孔套装带磁动力轮部件。
15、在一个实施例中,所述带磁动力轮部件包括:动力轮磁环外包轭铁、伺服电机、谐波减速机、法兰盘、内侧橡胶轮、外侧橡胶轮、第一轭铁、环形磁铁、第二轭铁、轮芯;伺服电机输出端接谐波减速机,谐波减速机通过法兰盘与动力电机支撑平台的动力轮驱动电机带减振固定架连接,谐波减速机输出端与轮芯固定连接;
16、外侧橡胶轮与内侧橡胶轮之间依次连接第一轭铁、环形磁铁、第二轭铁。
17、在一个实施例中,所述带磁动力轮部件一侧设有沿轮芯被动滑动的被动磁轮可沿轮轴滑动封板,用于带磁动力轮部件随轨宽进行变化。
18、在一个实施例中,所述带减振平行四边形机构包括:平行四边形机构平台侧连接件、平行四边形机构连杆、平行四边形机构轮侧连接件、平行四边形机构减振簧;
19、所述平行四边形机构平台侧连接件与动力电机支撑平台的动力轮支撑架连接;平行四边形机构轮侧连接件通过平行四边形机构连杆与平行四边形机构平台侧连接件铰接;
20、平行四边形机构减振簧一端与平行四边形机构平台侧连接件连接,另一端与平行四边形机构轮侧连接件;通过平行四边形机构减振簧改变伸出的长度调整平行四边形机构平台侧连接件与平行四边形机构轮侧连接件的角度;平行四边形机构轮侧连接件沿轨道长度方向设置有轴杆,与被动轮部件中的被动磁轮马鞍架连接。
21、在一个实施例中,所述横向开合机构包括:横向开合机构连杆、横向水平转动轴套、同步转动月牙齿轮;
22、通过横向开合机构水平转轴及同步转动月牙齿轮随轨距变化开合;
23、所述沿檩条长向的转动铰轴包括:平台沿檩条长度方向转动轴套、开合沿檩条长度方向转动轴套、开合机构水平转动轴;
24、所述开合机构水平转动轴为两个,分别固定在平台沿檩条长度方向转动轴套、开合沿檩条长度方向转动轴套上;
25、所述横向开合机构水平转轴活动套装在开合机构水平转动轴上。
26、在一个实施例中,所述平台沿檩条长度方向转动轴套与平台连接杆固定连接;平台连接杆与动力电机支撑平台的动力轮支撑架固定连接。
27、本发明的另一目的在于提供一种所述自适应曲面屋盖的空间钢结构喷涂变轮距机器人在变檩距屋盖的空间钢结构喷涂上的应用。
28、结合上述的所有技术方案,本发明所具备的优点及积极效果为:
29、第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果,具体描述如下:本发明提供的自适应曲面屋盖的空间钢结构喷涂变轮距机器人可应用于高空作业钢结构喷涂领域。现有技术没有较成熟的针对高空波形屋盖钢结构檩条进行喷涂的机器人装备。本发明提供的带磁动力轮及带磁被动轮能够适应檩条轨道宽度、及曲面的变化,为机器人稳定作业提供可靠平台。
30、第二、把技术方案看作一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:本发明实施例提供的自适应曲面屋盖的空间钢结构喷涂变轮距机器人通过一对横向开合机构,及2套转动铰轴机构,能够适应檩条轨道宽度的变化及檩条曲面布置的变化,通过动力电机支撑平台中动力轮驱动电机带减振固定架的设计,实现了多带磁动力轮部件及被动轮部件的自适应悬挂。本发明方便实施例提供的自适应曲面屋盖的空间钢结构喷涂变轮距机器人在檩条上稳定行走,避免发生卡死或者脱轨的问题,方便后续进行喷涂等檩条作业,为屋面屋盖檩条高空作业提供了良好的基础。
31、第三、作为本发明的权利要求的创造性辅助证据,还体现在以下几个重要方面:本发明极大的提高了作业效率,喷涂质量得以量化,降低了作业风险。
技术特征:
1.一种自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述自适应曲面屋盖的空间钢结构喷涂变轮距机器人的车体沿轨道横截面分为左右对称的两部分,左右两部分均设置有被动轮部件、动力电机支撑平台、带磁动力轮部件、带减振平行四边形机构、横向开合机构、转动铰轴;
2.根据权利要求1所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述被动轮部件包括:被动磁轮马鞍架(1),所述被动磁轮马鞍架(1)通过轮轴依次套装有被动磁轮外封板(11)、被动磁轮橡胶轮a(12)、被动磁轮轭铁a(13);被动磁轮磁环及外包轭铁(14)、被动磁轮轭铁b(15)、被动磁轮橡胶轮b(16)、被动磁轮可沿轮轴滑动封板(17)、被动磁轮外侧限位板(18)。
3.根据权利要求2所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述被动轮部件通过被动磁轮马鞍架(1)与平行四边形机构连接;
4.根据权利要求1所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述动力电机支撑平台包括:动力轮支撑架(2)、动力轮驱动电机带减振固定架(21);所述动力轮驱动电机带减振固定架(21)套装在动力轮支撑架(2)上;
5.根据权利要求1所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述带磁动力轮部件包括:动力轮磁环外包轭铁(3)、伺服电机(31)、谐波减速机(32)、法兰盘(33)、内侧橡胶轮(34)、外侧橡胶轮(35)、第一轭铁(36)、环形磁铁(37)、第二轭铁(38)、轮芯(39);伺服电机(31)输出端接谐波减速机(32),谐波减速机(32)通过法兰盘(33)与动力电机支撑平台的动力轮驱动电机带减振固定架(21)连接,谐波减速机(32)输出端与轮芯(39)固定连接;
6.根据权利要求5所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述带磁动力轮部件一侧设有沿轮芯(39)被动滑动的被动磁轮可沿轮轴滑动封板(17),用于带磁动力轮部件随轨宽进行变化。
7.根据权利要求1所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述带减振平行四边形机构包括:平行四边形机构平台侧连接件(4)、平行四边形机构连杆(41)、平行四边形机构轮侧连接件(42)、平行四边形机构减振簧(43);
8.根据权利要求1所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述横向开合机构包括:横向开合机构连杆(6)、横向水平转动轴套(61)、同步转动月牙齿轮(62);
9.根据权利要求8所述的自适应曲面屋盖的空间钢结构喷涂变轮距机器人,其特征在于,所述平台沿檩条长度方向转动轴套(7)与平台连接杆(5)固定连接;平台连接杆(5)与动力电机支撑平台的动力轮支撑架(2)固定连接。
10.一种如权利要求1-9任意一项所述自适应曲面屋盖的空间钢结构喷涂变轮距机器人在变檩距屋盖的空间钢结构喷涂上的应用。
技术总结
本发明属于机器人技术领域,公开了自适应曲面屋盖的空间钢结构喷涂变轮距机器人及应用。所述机器人的车体沿轨道横截面分为左右对称的两部分,左右两部分均设置有被动轮部件、动力电机支撑平台、带磁动力轮部件、带减振平行四边形机构、横向开合机构、转动铰轴;左右两部分之间设置有横向开合机构,使车体随檩条间距变化相应开合。本发明实现了多带磁动力轮部件及被动轮部件的自适应悬挂。本发明方便实施例提供的自适应曲面屋盖的空间钢结构喷涂变轮距机器人在檩条上稳定行走,避免发生卡死或者脱轨的问题,方便后续进行喷涂等檩条作业,为屋面屋盖檩条高空作业提供了良好的基础。
技术研发人员:田承昊,赵光伟,余洋,陶然,张鹏,刘明,韩春梅
受保护的技术使用者:中国铁路设计集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!