一种鞋底自动取点喷涂设备及其喷涂路径规划算法的制作方法
本发明涉及鞋加工,具体为一种鞋底自动取点喷涂设备,还包括一种鞋底自动取点喷涂设备的路径规划算法。
背景技术:
1、鞋子是人们保护脚不受伤的一种工具,在生产活动中十分重要。
2、目前,现有的生产技术大部分还是以人工为主,现有的设备技术无法离开工厂的流水线而进行款式更换,每更换一个鞋子的款式,流水线至少需要停线半天,适应鞋底复杂曲面表面的喷涂作业,使得工厂生产效率无法得到保障。
3、为此,发明人提出一种鞋底自动取点喷涂设备及其喷涂路径规划算法。
技术实现思路
1、本发明的目的在于提供一种鞋底自动取点喷涂设备及其喷涂路径规划算法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种鞋底自动取点喷涂设备,包括:
3、机箱,箱壁上部由透明玻璃制成,密闭箱内空间,箱内空间与外界隔离;
4、输送台,对称布置有两个,分别位于机箱内,并设置两个输送台上分别安装有左右脚模具,用来分别盛放左右脚底;
5、抓取机器人,位于机箱外部,所述抓取机器人顶端的抓盘自动抓取鞋底,通过机箱的侧部窗口来回递送鞋底在输送台上;
6、喷涂机器人,安装在机箱内,通过内置的喷涂路径规划算法获取行动轨迹,通过喷涂机器人顶部的喷枪对鞋底进行喷胶加工。
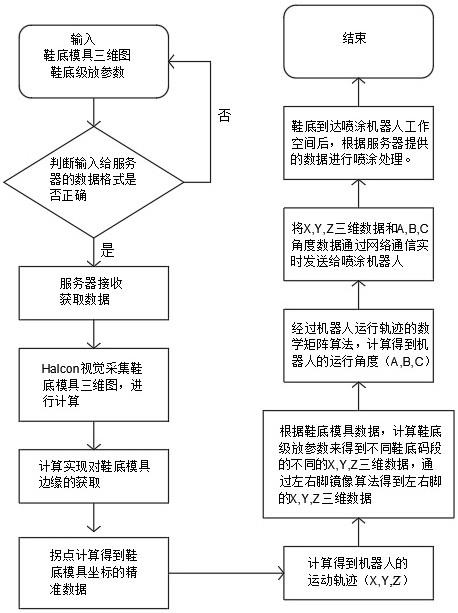
7、一种鞋底自动取点喷涂设备的路径规划算法,算法包括以下步骤:
8、1)输入:鞋底模具三维图和鞋底级放参数;
9、2)判断输入给服务器的数据格式是否正确,正确则进行下一步,不正确则返回步骤1),重新输入正确内容的数据;
10、3)服务器接收获取数据;
11、4)halcon视觉采集鞋底模具三维图,进行计算;
12、5)计算实现对鞋底模具边缘的获取;
13、6)拐点计算得到鞋底模具坐标的精准数据;
14、7)计算得到机器人的运动轨迹(x,y,z);
15、8)根据鞋底模具数据,计算鞋底级放参数来得到不同鞋底码段的不同的x,y,z三维数据,通过左右脚镜像算法得到左右脚的x,y,z三维数据;
16、9)经过机器人运行轨迹的数学矩阵算法,计算得到机器人的运行角度(a,b,c);
17、10)将x,y,z三维数据和a,b,c角度数据通过网络通信实时发送给喷涂机器人;
18、11)鞋底到达喷涂机器人工作空间后,根据服务器提供的数据进行喷涂处理。
19、作为本发明所述鞋底自动取点喷涂设备的喷涂路径规划算法的一种可选方案,其中:所述网络通信采取tcp/ip方式,数据连接喷涂机器人。
20、与现有技术相比,本发明的有益效果:
21、1、该鞋底自动取点喷涂设备及其喷涂路径规划算法,在更换鞋型时,能够快速获取鞋底的三维坐标数数据,对应鞋底款式计算生成机器人的喷涂运动轨迹,从而达到不停线、不停机来进行换款换型的目的;
22、2、该鞋底自动取点喷涂设备,通过机器人进行高效安全的密闭加工,效率高密封好,改善人工喷涂的健康隐患。
技术特征:
1.一种鞋底自动取点喷涂设备,其特征在于,包括:
2.一种使用权利要求1的设备的喷涂路径规划算法,其特征在于,算法包括以下步骤:
3.根据权利要求2所述的喷涂路径规划算法,其特征在于:所述网络通信采取tcp/ip方式,数据连接喷涂机器人(5)。
技术总结
本发明涉及鞋加工技术领域,公开了一种鞋底自动取点喷涂设备及其喷涂路径规划算法,包括:机箱;输送台;抓取机器人;喷涂机器人。还公开了一种鞋底自动取点喷涂的路径规划算法,根据鞋底模具数据,计算鞋底级放参数来得到左右脚的X,Y,Z三维数据,再计算得到机器人的运行角度(A,B,C),并将X,Y,Z三维数据和A,B,C角度数据通过网络通信实时发送给喷涂机器人,进行喷涂工作处理。本发明,在更换鞋型时,能够快速获取鞋底的三维坐标数数据,对应鞋底款式计算生成机器人的喷涂运动轨迹,从而达到不停线、不停机来进行换款换型的目的;通过机器人进行高效安全的密闭加工,效率高密封好,改善人工喷涂的健康隐患。
技术研发人员:陈旻,陈昱延,陈文辉
受保护的技术使用者:福建博璋智能科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!