一种结合目标检测算法的高压微雾除尘系统的制作方法
本发明属于人工智能,涉及一种结合目标检测算法的高压微雾除尘系统。
背景技术:
1、在储存转运粉料或含有粉尘较多的料场中很容易出现大量扬尘,不仅影响料场的运作还会对现场工作人员的身体健康造成损害,因此需要使用降尘设备进行降尘从而净化环境。但是现有很多料场在工作时间需要频繁进行物料的运输、下料,因此,物料传输过程这种也会导致不同程度的灰尘状态,人工操控设备难以即时喷雾降尘。现有的自动化降尘设备,成本高,设备投入大,还由于粉尘本身属于较难准确识别的微小目标,现有的目标检测方法难以实现粉尘的定位检测,也就不能精准降尘,为了达到降尘效果只能扩大喷雾范围,造成喷洒范围不精准,浪费资源,使用的成本也难以降低。
技术实现思路
1、本发明的目的是提供一种结合目标检测算法的高压微雾除尘系统,用于解决现有技术中自动化降尘设备难以实现粉尘的定位检测、不能精准降尘、浪费资源、使用成本难以降低的技术问题。
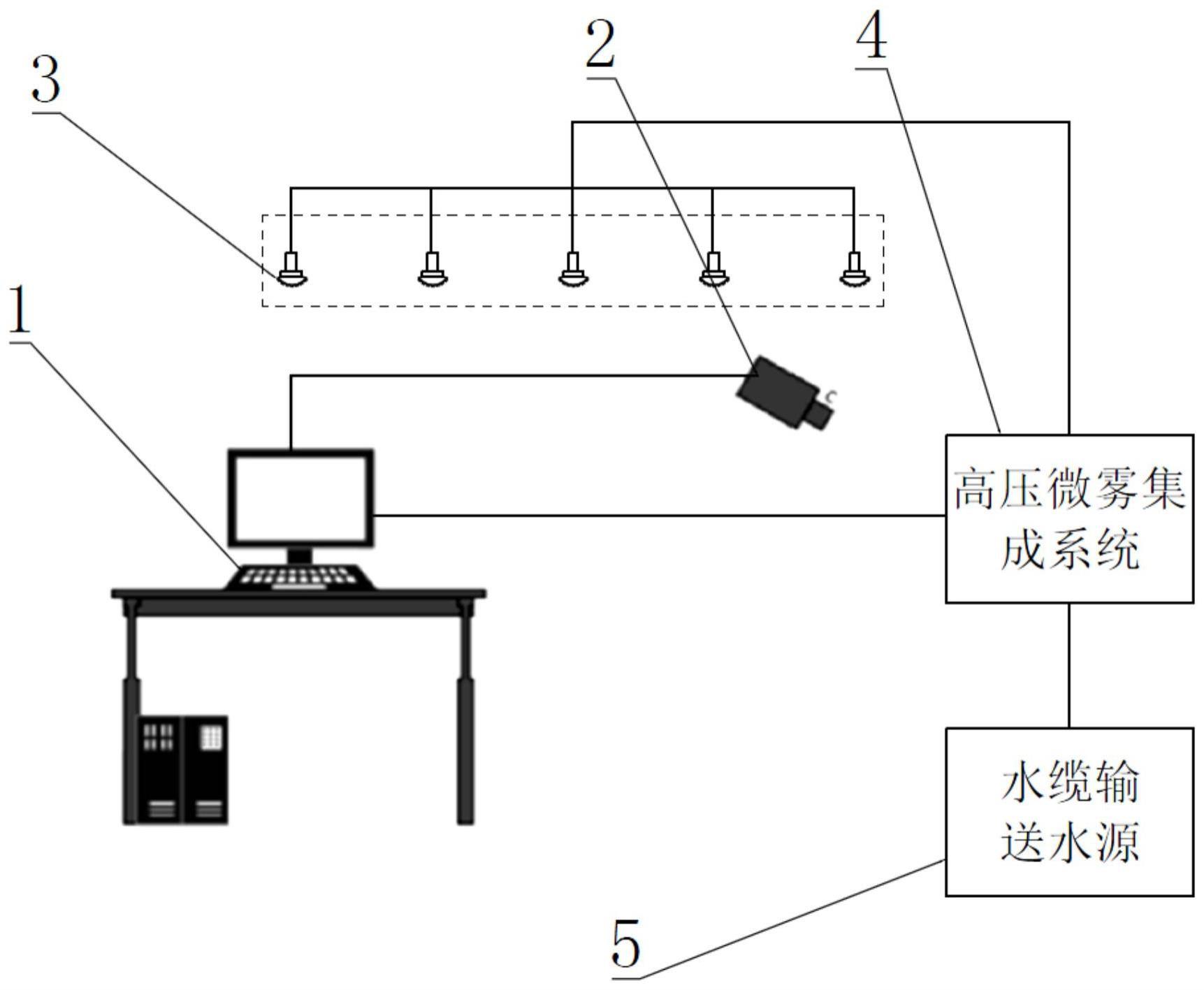
2、所述的结合目标检测算法的高压微雾除尘系统,包括检测平台、水缆输送水源、高压微雾集成系统与高压雾化喷头,所述水缆输送水源用于供水,水流经高压微雾集成系统输送到相应高压雾化喷头,所述检测平台通过图像采集模块采集现场图像,并通过现场灰尘定位检测算法检测灰尘的位置和范围,进而控制对应所述位置的高压雾化喷头进行喷雾,喷雾范围依据检测所得的灰尘范围进行控制。
3、所述现场灰尘定位检测算法采用轻量级的网络yolox模型作为目标检测模型,所述网络yolox模型包括主干部分、瓶颈网络和目标检测头,主干部分为cspdarknet结构,操作是不同程度的卷积,提取输入图像的低维与高维的特征信息;该模型采用带有残差结构的卷积层;瓶颈网络采用spp结构,使用不同大小的池化核进行最大池化;特征信息送入yolohead模块后,通过卷积的方式实现类别预测与锚框回归任务。
4、优选的,在特征提取阶段,所述spp模块将残差边转换为全局上下文感知模型。
5、优选的,目标检测模型使用特征融合模块,所述特征融合模块采用反卷积与下采样方式连接不同尺寸与维度的特征信息,最后将前述处理所得的特征信息送入yolohead模块。
6、优选的,所述高压微雾除尘系统的使用方法包括下列步骤:
7、步骤一、采集堆料现场在下料过程中不同程度灰尘状况的图像,并制作为相应图像数据集;
8、步骤二、对图像数据集进行打标签操作,标注图像对应的待测灰尘的位置范围及种类信息;
9、步骤三、将标注后的图像数据集随机划分为训练集与测试集,将训练集用于训练目标检测模型;
10、步骤四、观察训练过程中目标检测模型的损失函数是否收敛,如收敛到最佳则进行下一步,否则继续用训练集中其他已标注的图像进行训练;
11、步骤五、保存训练得到的最佳权重参数,得到训练好的目标检测模型;
12、步骤六、使用训练好的现场灰尘定位检测算法进行灰尘检测,打开摄像机的实时画面的同时加载目标检测模型,检测摄像机实时传输的现场画面;
13、步骤七、若下料机口产生灰尘,检测平台测出灰尘的位置和范围,基于测定的灰尘位置打开对应的高压雾化喷头,准确控制喷洒范围实现精准除尘。
14、优选的,所述步骤六中,将安装在堆料现场的摄像机作为图形采集模块,检测平台搭配摄像机的开放系统,将现场灰尘定位检测算法部署到摄像机的开发框架中。
15、优选的,所述步骤七中,检测平台在检测到灰尘后会开启高压微雾集成系统,并基于测定的灰尘位置打开对应的高压雾化喷头,并基于测得的灰尘范围准确控制喷洒范围,从而实现较为精准除尘。
16、本发明具有以下优点:本发明提供的高压微雾除尘系统,一方面使用改进的目标检测模型,实时检测物料传输过程中各个位置的灰尘情况;有效提高了对灰尘位置范围的检测准确性,从而能定位灰尘的具体位置,指导喷雾的工作位置与范围;另一方面利用高压微雾集成系统与现场布置的多个高压雾化喷头,准确选定相应喷头的数量、位置和喷洒范围,实现精准降尘,节约设备资源,降低了除尘所用成本。
技术特征:
1.一种结合目标检测算法的高压微雾除尘系统,其特征在于:包括检测平台(1)、水缆输送水源(5)、高压微雾集成系统(4)与高压雾化喷头(3),所述水缆输送水源(5)用于供水,水流经高压微雾集成系统(4)输送到相应高压雾化喷头(3),所述检测平台(1)通过图像采集模块采集现场图像,并通过现场灰尘定位检测算法检测灰尘的位置和范围,进而控制对应所述位置的高压雾化喷头(3)进行喷雾,喷雾范围依据检测所得的灰尘范围进行控制;
2.根据权利要求1所述的一种结合目标检测算法的高压微雾除尘系统,其特征在于:在特征提取阶段,所述spp模块将残差边转换为全局上下文感知模型。
3.根据权利要求1或2所述的一种结合目标检测算法的高压微雾除尘系统,其特征在于:目标检测模型使用特征融合模块,所述特征融合模块采用反卷积与下采样方式连接不同尺寸与维度的特征信息,最后将前述处理所得的特征信息送入yolohead模块。
4.根据权利要求3所述的一种结合目标检测算法的高压微雾除尘系统,其特征在于:所述高压微雾除尘系统的使用方法包括下列步骤:
5.根据权利要求4所述的一种结合目标检测算法的高压微雾除尘系统,其特征在于:所述步骤六中,将安装在堆料现场的摄像机(2)作为图形采集模块,检测平台(1)搭配摄像机(2)的开放系统,将现场灰尘定位检测算法部署到摄像机(2)的开发框架中。
6.根据权利要求5所述的一种结合目标检测算法的高压微雾除尘系统,其特征在于:所述步骤七中,检测平台(1)在检测到灰尘后会开启高压微雾集成系统(4),并基于测定的灰尘位置打开对应的高压雾化喷头(3),并基于测得的灰尘范围准确控制喷洒范围,从而实现较为精准除尘。
技术总结
本发明属于故障诊断技术领域,公开了一种结合目标检测算法的高压微雾除尘系统,包括检测平台、水缆输送水源、高压微雾集成系统与高压雾化喷头,所述水缆输送水源用于供水,水流经高压微雾集成系统输送到相应高压雾化喷头,所述检测平台通过图像采集模块采集现场图像,并通过现场灰尘定位检测算法检测灰尘的位置和范围,进而控制对应所述位置的高压雾化喷头进行喷雾,喷雾范围依据检测所得的灰尘范围进行控制。本发明有效提高了对灰尘位置范围的检测准确性,从而能定位灰尘的具体位置,指导喷雾的工作位置与范围;并能准确选定相应喷头的数量、位置和喷洒范围,实现精准降尘,节约设备资源。
技术研发人员:吴铁军,范警卫,陆凡凡,周立,汪诚,陈洋,张晓光
受保护的技术使用者:安徽智质工程技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!