点胶机视觉定位方法、装置、设备及存储介质与流程
本发明涉及定位,尤其涉及一种点胶机视觉定位方法、装置、设备及存储介质。
背景技术:
1、随着行业的快速发展,点胶技术的运用越来越普遍,为了适应点胶工业生产的发展,点胶机不断向自动化方向发展,越来越多的人对视觉定位系统进行研究,现有点胶机视觉定位方法是通过3d相机获取图像点云数据,再对图像点云数据光照识别矫正和特征增强处理,从而进行视觉定位,但此方法基于定位特征与匹配计算相结合的图像特征配准模型在处理速度上也比较耗时,且成本较高,因此,如何提高点胶机视觉定位的效率成为了亟待解决的问题。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种点胶机视觉定位方法、装置、设备及存储介质,旨在解决现有技术点胶机视觉定位效率低的技术问题。
2、为实现上述目的,本发明提供了一种点胶机视觉定位方法,所述方法包括以下步骤:
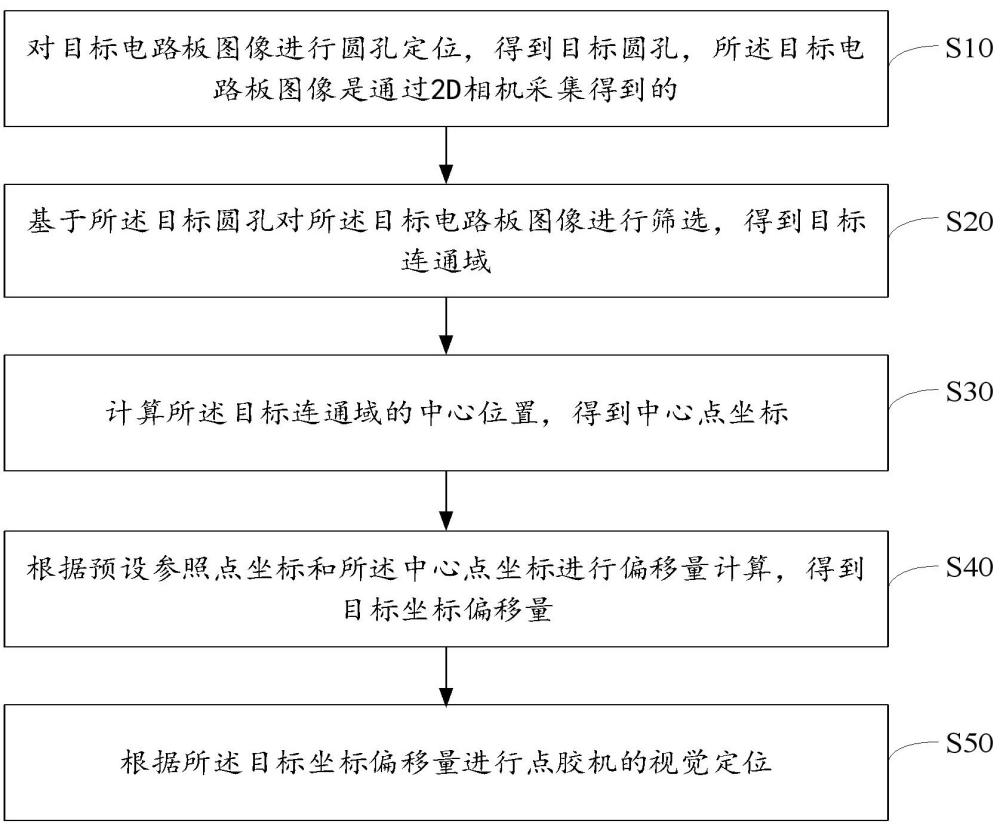
3、对目标电路板图像进行圆孔定位,得到目标圆孔,所述目标电路板图像是通过2d相机采集得到的;
4、基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域;
5、计算所述目标连通域的中心位置,得到中心点坐标;
6、根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量;
7、根据所述目标坐标偏移量进行点胶机的视觉定位。
8、可选地,所述对目标电路板图像进行圆孔定位,得到目标圆孔,包括:
9、根据预设阈值算法对目标电路板图像进行二值化处理,得到二值化电路板图像;
10、根据所述二值化电路板图像得到多个图像连通域;
11、对多个图像连通域进行椭圆拟合处理,得到各图像连通域的椭圆拟合参数;
12、根据预设尺寸参数对各图像连通域的椭圆拟合参数进行筛选,确定目标圆孔。
13、可选地,所述基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域,包括:
14、根据预设图像范围对目标圆孔进行图像截取,得到特征区域图像;
15、对所述特征区域图像进行二值化处理,得到二值化特征图像;
16、根据所述二值化特征图像得到多个特征连通域;
17、对多个特征连通域的预设连通域数据进行打分;
18、根据打分结果确定与目标得分对应的特征连通域为目标连通域。
19、可选地,所述对多个特征连通域的预设连通域数据进行打分,包括:
20、根据预设距离得分公式对多个特征连通域的距离进行计算,得到多个距离得分;
21、根据预设半径得分公式对多个特征连通域的半径进行计算,得到多个半径得分;
22、根据预设圆形度得分公式对多个特征连通域的圆形度进行计算,得到多个圆形度得分;
23、基于预设加权计算方式对多个距离得分、多个半径得分以及多个圆形度得分进行打分。
24、可选地,所述计算所述目标连通域的中心位置,得到中心点坐标,包括:
25、根据目标连通域得到目标起点坐标和连通域边界;
26、基于所述连通域边界对所述目标起点坐标进行更新,得到起点更新坐标;
27、根据所述起点更新坐标确定中心点坐标。
28、可选地,所述基于所述连通域边界对所述目标起点坐标进行更新,得到起点更新坐标,包括:
29、根据连通域边界和第一预设方向对目标起点坐标的横坐标进行更新,得到更新横坐标;
30、根据连通域边界和第二预设方向对目标起点坐标的纵坐标进行更新,得到更新纵坐标;
31、根据所述更新横坐标和所述更新纵坐标得到起点更新坐标。
32、可选地,所述根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量,包括:
33、根据预设偏移量计算方式对预设参照点坐标和中心点坐标进行计算;
34、根据计算结果得到像素坐标偏移量;
35、基于预设转换方式对所述像素坐标偏移量进行格式转换,得到目标坐标偏移量。
36、此外,为实现上述目的,本发明还提出一种点胶机视觉定位装置,所述点胶机视觉定位装置包括:
37、定位模块,用于对目标电路板图像进行圆孔定位,得到目标圆孔,所述目标电路板图像是通过2d相机采集得到的;
38、筛选模块,用于基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域;
39、计算模块,用于计算所述目标连通域的中心位置,得到中心点坐标;
40、所述计算模块,还用于根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量;
41、控制模块,用于根据所述目标坐标偏移量进行点胶机的视觉定位。
42、此外,为实现上述目的,本发明还提出一种点胶机视觉定位设备,所述点胶机视觉定位设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的点胶机视觉定位程序,所述点胶机视觉定位程序配置为实现如上文所述的点胶机视觉定位方法的步骤。
43、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有点胶机视觉定位程序,所述点胶机视觉定位程序被处理器执行时实现如上文所述的点胶机视觉定位方法的步骤。
44、本发明通过对目标电路板图像进行圆孔定位,得到目标圆孔,所述目标电路板图像是通过2d相机采集得到的;基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域;计算所述目标连通域的中心位置,得到中心点坐标;根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量;根据所述目标坐标偏移量进行点胶机的视觉定位。通过对目标电路板图像进行定位得到目标圆孔,再筛选目标电路板图像得到目标连通域,根据目标连通域的中心点坐标和参照点坐标计算偏移量,根据目标坐标偏移量控制点胶机进行定位,提高了视觉定位的效率并降低了成本。
技术特征:
1.一种点胶机视觉定位方法,其特征在于,所述点胶机视觉定位方法包括:
2.如权利要求1所述的方法,其特征在于,所述对目标电路板图像进行圆孔定位,得到目标圆孔,包括:
3.如权利要求1所述的方法,其特征在于,所述基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域,包括:
4.如权利要求3所述的方法,其特征在于,所述对多个特征连通域的预设连通域数据进行打分,包括:
5.如权利要求1所述的方法,其特征在于,所述计算所述目标连通域的中心位置,得到中心点坐标,包括:
6.如权利要求5所述的方法,其特征在于,所述基于所述连通域边界对所述目标起点坐标进行更新,得到起点更新坐标,包括:
7.如权利要求1所述的方法,其特征在于,所述根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量,包括:
8.一种点胶机视觉定位装置,其特征在于,所述点胶机视觉定位装置包括:
9.一种点胶机视觉定位设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的点胶机视觉定位程序,所述点胶机视觉定位程序配置为实现如权利要求1至7中任一项所述的点胶机视觉定位方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有点胶机视觉定位程序,所述点胶机视觉定位程序被处理器执行时实现如权利要求1至7任一项所述的点胶机视觉定位方法的步骤。
技术总结
本发明属于定位技术领域,公开了一种点胶机视觉定位方法、装置、设备及存储介质。本发明通过对目标电路板图像进行圆孔定位,得到目标圆孔,所述目标电路板图像是通过2D相机采集得到的;基于所述目标圆孔对所述目标电路板图像进行筛选,得到目标连通域;计算所述目标连通域的中心位置,得到中心点坐标;根据预设参照点坐标和所述中心点坐标进行偏移量计算,得到目标坐标偏移量;根据所述目标坐标偏移量进行点胶机的视觉定位。通过对目标电路板图像进行定位得到目标圆孔,再筛选目标电路板图像得到目标连通域,根据目标连通域的中心点坐标和参照点坐标计算偏移量,根据目标坐标偏移量控制点胶机进行定位,提高了视觉定位的效率并降低了成本。
技术研发人员:李林峰,汪杨刚,毛红运
受保护的技术使用者:武汉海微科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!