自动回温柜的制作方法
本技术涉及自动化设备,特别是涉及一种自动回温柜。
背景技术:
1、胶水被普遍运用于对电子电器元器件进行粘接、密封、灌封、涂覆、结构粘接、共形覆膜和smt贴片。
2、在生产过程中,该胶水主要存放于零下环境。在使用时,需要取出该胶水进行回温后再进行使用。在胶水回温时,需要控制胶水的回温时间,回温时间过长或过短都会影响胶水的使用质量。回温时间过长,胶水会产生气泡;回温时间过短,胶水起不到所需的粘度。
3、目前现有的回温装置,只设定了定时功能来控制胶水的回温时间,需要人工操作来取放胶水。在整个回温流程中,存在着大量重复性、机械性的工作。由于胶水回温所需的时间较长,当胶水数量较多时,人工操作会发生失误,容易搞错胶水回温的先后顺序,难以准确控制每个胶水的回温时间。
技术实现思路
1、本实用新型的一个优势在于提供了一种自动回温柜,其能够自动地从进出料盘将盛有需要回温的物料的容器从进出料盘夹取至回温盘,经过预设的回温时间后,再将盛有完成回温的物料的容器从所述回温盘夹取至进出料盘,减少人工操作,防止搞错胶水回温先后顺序。
2、本实用新型的另一个优势在于提供了一种自动回温柜,其能够同时放置多种直径的容器来回温物料。
3、本实用新型的另一个优势在于提供了一种自动回温柜,其能够提供恒定的回温环境,不受外界环境温度影响,以降低物料回温过程中的损失率。
4、基于此,为了实现本实用新型的上述至少一个优势或其他优点和目的,本实用新型提供了一种自动回温柜,用于回温物料,包括:
5、柜体;
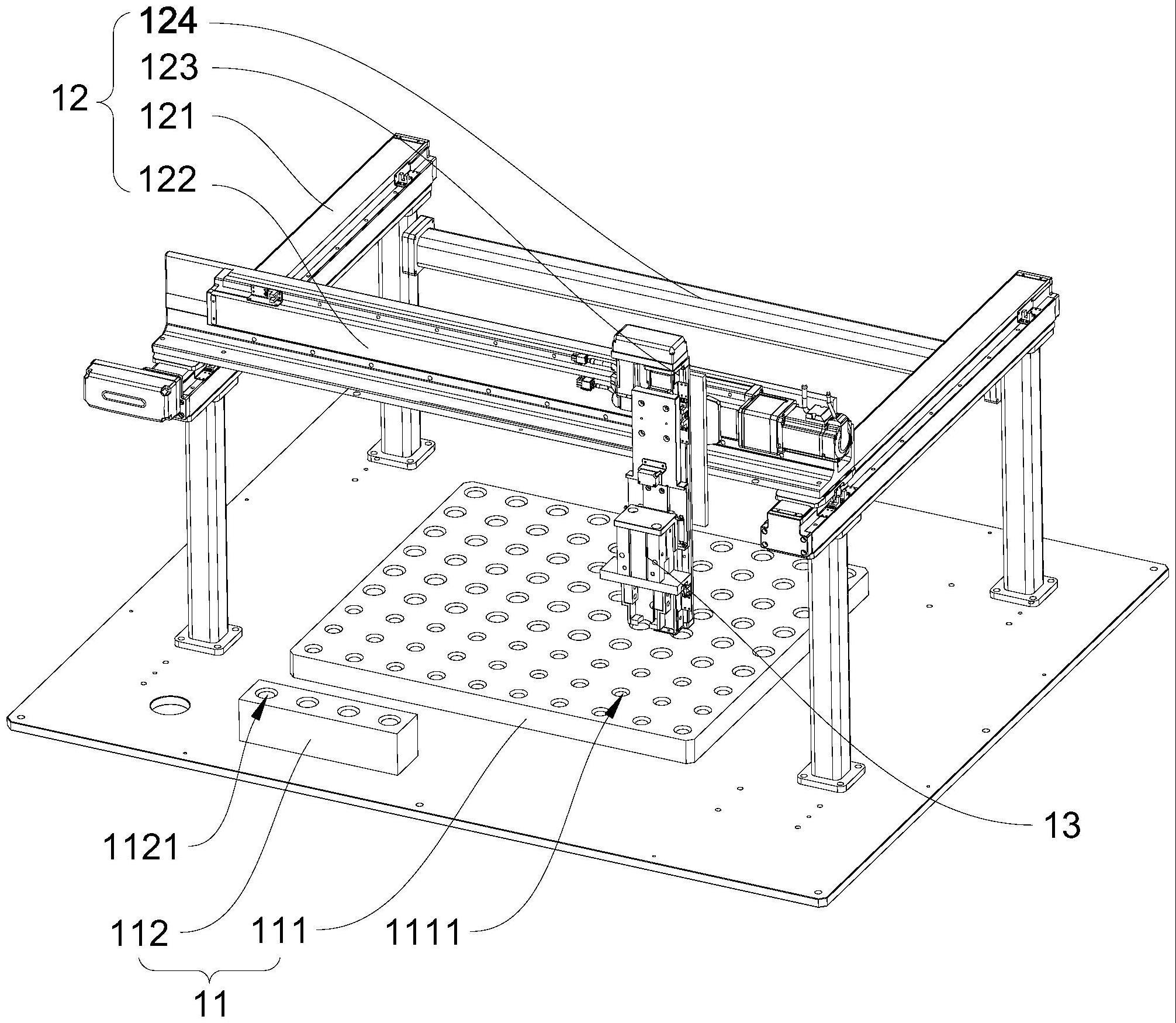
6、回温组件,所述回温组件包括具有多个回温孔的回温盘和具有多个进出料孔的进出料盘,所述回温孔和所述进出料孔用于放置盛有该物料的容器,所述回温盘固设于所述柜体,所述进出料盘固设于所述柜体,并位于所述回温盘的一侧;
7、固设于所述柜体的运动组件;
8、固设于所述运动组件的夹持组件,所述夹持组件用于夹持该容器;以及
9、控制组件,所述控制组件可通信地连接于所述运动组件和所述夹持组件,所述控制组件用于控制所述运动组件,以带动所述夹持组件将盛有未回温的物料的该容器从所述进出料盘夹取至所述回温盘的所述回温孔,并在预设的回温时间后,再将盛有已回温的物料的该容器从所述回温盘夹取至所述进出料盘的所述进出料孔。
10、根据本申请的一个实施例,所述回温孔孔的内壁直径自下而上呈阶梯式增大,所述进出料孔的内壁直径自下而上呈阶梯式增大。
11、根据本申请的一个实施例,所述控制组件包括光电传感器,所述光电传感器位于所述进出料盘上方,用于检测所述进出料盘的所述进出料孔是否放置盛有该物料的该容器。
12、根据本申请的一个实施例,所述自动回温柜进一步包括固设于所述柜体的恒温器,所述恒温器用于保持所述自动回温柜内的回温温度。
13、根据本申请的一个实施例,所述回温孔按照直径大小顺序阵列排布于所述回温盘。
14、根据本申请的一个实施例,所述自动回温柜进一步包括缓冲组件,所述缓冲组件固设于所述夹持组件和所述运动组件之间。
15、根据本申请的一个实施例,所述缓冲组件包括滑块,滑轨和弹性件,所述滑块可上下滑动地设置于所述滑轨,所述滑轨固设于所述运动组件,所述夹持组件固设于所述滑块,所述弹性件固设于所述滑块和所述滑轨之间。
16、根据本申请的一个实施例,所述控制组件进一步包括距离传感器和警报组件,所述距离传感器固设于所述运动组件,用于检测所述夹持组件到所述距离传感器的距离变化,其中当所述夹持组件到所述距离传感器之间的距离减小时,所述警报组件发出警报。
17、根据本申请的一个实施例,所述夹持组件包括夹持爪,固设于所述夹持爪的一对辅助夹板以及弹性夹块,所述弹性夹块的一侧固设于所述辅助夹板,另一侧具有弧形凹槽。
18、根据本申请的一个实施例,所述运动组件可以包括龙门架,x轴机器人,y轴机器人,z轴机器人,所述龙门架固设于所述柜体,所述x轴机器人固设于所述龙门架,所述y轴机器人可滑动地安装于所述x轴机器人,所述z轴机器人可滑动地安装于所述z轴机器人,所述夹持组件可滑动地安装于所述z轴机器人;所述控制组件可通信地连接于所述所述x轴机器人,所述y轴机器人和所述z轴机器人。
技术特征:
1.自动回温柜,用于回温物料,其特征在于,包括:
2.根据权利要求1所述的自动回温柜,其特征在于,所述回温孔的内壁孔径自下而上呈阶梯式增大,所述进出料孔的内壁孔径自下而上呈阶梯式增大。
3.根据权利要求1所述的自动回温柜,其特征在于,所述控制组件包括光电传感器,所述光电传感器位于所述进出料盘上方,用于检测所述进出料盘的所述进出料孔是否放置盛有该物料的该容器。
4.根据权利要求1所述的自动回温柜,其特征在于,所述回温孔按照直径大小顺序阵列排布于所述回温盘。
5.根据权利要求1所述的自动回温柜,其特征在于,所述自动回温柜进一步包括固设于所述柜体的恒温器,所述恒温器用于保持所述自动回温柜内的回温温度。
6.根据权利要求1至5中任意一项所述的自动回温柜,其特征在于,所述自动回温柜进一步包括缓冲组件,所述缓冲组件固设于所述夹持组件和所述运动组件之间。
7.根据权利要求6所述的自动回温柜,其特征在于,所述缓冲组件包括滑块,滑轨和弹性件,所述滑块可上下滑动地设置于所述滑轨,所述滑轨固设于所述运动组件,所述夹持组件固设于所述滑块,所述弹性件固设于所述滑块和所述滑轨之间。
8.根据权利要求7所述的自动回温柜,其特征在于,所述控制组件进一步包括距离传感器和警报组件,所述距离传感器固设于所述运动组件,用于检测所述夹持组件到所述距离传感器的距离变化,其中当所述夹持组件到所述距离传感器之间的距离减小时,所述警报组件发出警报。
9.根据权利要求6所述的自动回温柜,其特征在于,所述夹持组件包括夹持爪,固设于所述夹持爪的一对辅助夹板以及弹性夹块,所述弹性夹块的一侧固设于所述辅助夹板,另一侧具有弧形凹槽。
10.根据权利要求6所述的自动回温柜,其特征在于,所述运动组件可以包括龙门架,x轴机器人,y轴机器人,z轴机器人,所述龙门架固设于所述柜体,所述x轴机器人固设于所述龙门架,所述y轴机器人可滑动地安装于所述x轴机器人,所述z轴机器人可滑动地安装于所述z轴机器人,所述夹持组件可滑动地安装于所述z轴机器人;所述控制组件可通信地连接于所述x轴机器人,所述y轴机器人和所述z轴机器人。
技术总结
本技术提供了一种自动回温柜,该自动回温柜包括:柜体;回温组件,该回温组件包括具有多个回温孔的回温盘和具有多个进出料孔的进出料盘,该回温孔和该进出料孔用于放置盛有该物料的容器,该回温盘固设于该柜体,该进出料盘固设于该柜体,并位于该回温盘的一侧;固设于该柜体的运动组件;固设于该运动组件的夹持组件,该夹持组件用于夹持该容器;以及控制组件,该控制组件可通信地连接于该运动组件和该夹持组件,该控制组件用于控制该运动组件,以带动该夹持组件将盛有未回温的物料的该容器从该进出料盘夹取至该回温盘的该回温孔,并在预设的时间回温后,再将盛有已回温的物料的该容器从该回温盘夹取至该进出料盘的该进出料孔。
技术研发人员:宋岩卓,朱建堂,金利红,杜东,戴婷,俞丁佳,赵志,金艳平
受保护的技术使用者:浙江大华智联有限公司
技术研发日:20230109
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!