一种除胶机构的制作方法
本技术涉及除胶,具体为一种除胶机构。
背景技术:
1、自动喷胶机是通过输入已编制好的程序,让其控制机械手按其所需要的形状、喷胶厚度、宽度实行自动喷胶的设备,其是由手动喷枪通过不断研发改进而产生的,自动喷胶机喷涂均匀,喷涂量可控,自动喷胶机通过喷涂的方式将胶水涂覆在被涂物上;
2、一般自动喷胶机通过这种喷胶方式进行喷涂胶水,胶水从出胶口,连续不间断的喷出胶水而进行涂胶。
3、这种方式会导致喷涂完成后会有尾胶在出胶口凝固,操作人员清理出胶嘴残留下的胶水,需要在机器停止运行后才能除胶,影响加工效率。
技术实现思路
1、基于此,有必要针对现有技术中除胶机构的问题,提供一种除胶机构。
2、为实现上述目的,本实用新型采用了以下技术方案:
3、一种除胶机构,包括除胶组件;所述除胶组件包括气缸夹爪、第一剪切块和第二剪切块,所述气缸夹爪包括两组夹爪臂,其中一组所述夹爪臂的侧部与第一剪切块,另一组所述夹爪臂与第二剪切块连接,所述第一剪切块的横截面由梯形和长方形组成,所述第二剪切块的横截面由三角形和长方形组成,所述气缸夹爪通过夹爪臂控制第一剪切块和第二剪切块开合,除去自动涂胶机出胶口尾胶;
4、所述气缸夹爪上设有清理组件,清理组件用于清理第一剪切块和第二剪切块表面尾胶。
5、进一步的,所述清理组件包括延伸杆和刮刀,所述延伸杆的端部与刮刀转动连接,所述延伸杆与刮刀的连接处位于刮刀边缘处,所述延伸杆的端部与气缸夹爪连接。
6、进一步的,所述刮刀位于夹爪臂的上方,所述刮刀为梯形,所述刮刀设有两组,两组所述刮刀分别与第一剪切块和第二剪切块的配合连接。
7、进一步的,所述气缸夹爪还包括气缸、传动组件,所述气缸的端部连接有传动组件,所述传动组件的侧部与夹爪臂连接。
8、进一步的,所述夹爪臂上设有阶梯缺口,所述第一剪切块与第二剪切块分别安装在两组夹爪臂上的阶梯缺口处,所述传动组件的侧部与延伸杆连接。
9、进一步的,所述除胶机构还包括调节组件,所述调节组件包括手动调节组件、气动推杆或电动推杆中的一种,所述调节组件的端部与气缸连接。
10、进一步的,所述手动调节组件包括双头螺杆、第一螺纹座和第二螺纹座,所述双头螺杆的端部与第一螺纹座连接,所述双头螺杆的另一端与第二螺纹座连接,所述气缸的侧部与第一螺纹座连接,所述第二螺纹座上设有安装座。
11、与现有技术相比,本实用新型的有益效果包括:
12、1、本实用新型的除胶机构,自动喷胶机多次喷胶后,气缸通过传动组件控制夹爪臂的闭合,以至于第一剪切块和第二剪切块相向移动,以将自动喷胶机出胶口处的凝固尾胶夹除,无需停止自动喷胶机的运行,即可将尾胶处理,避免影响喷胶加工效率。
13、2、本实用新型的除胶机构,在除胶组件除胶后在气缸作用下复位,两组刮刀由于自重会自动转动,从而刮刀会与第一剪切块以及第二剪切块贴合刮除表面尾胶,从而避免尾胶粘在第一剪切块和第二剪切块上,导致除胶效果变差,操作人员可分别转动双头螺杆和第一螺纹座,以提高除胶组件高度,以适配喷胶机出胶口高度。
技术特征:
1.一种除胶机构,其特征在于:包括,
2.根据权利要求1所述的除胶机构,其特征在于:所述清理组件包括延伸杆(6)和刮刀(7),所述延伸杆(6)的端部与刮刀(7)转动连接,所述延伸杆(6)与刮刀(7)的连接处位于刮刀(7)边缘处,所述延伸杆(6)的端部与气缸夹爪连接。
3.根据权利要求2所述的除胶机构,其特征在于:所述刮刀(7)位于夹爪臂(3)的上方,所述刮刀(7)为梯形,所述刮刀(7)设有两组,两组所述刮刀(7)分别与第一剪切块(4)和第二剪切块(5)的配合连接。
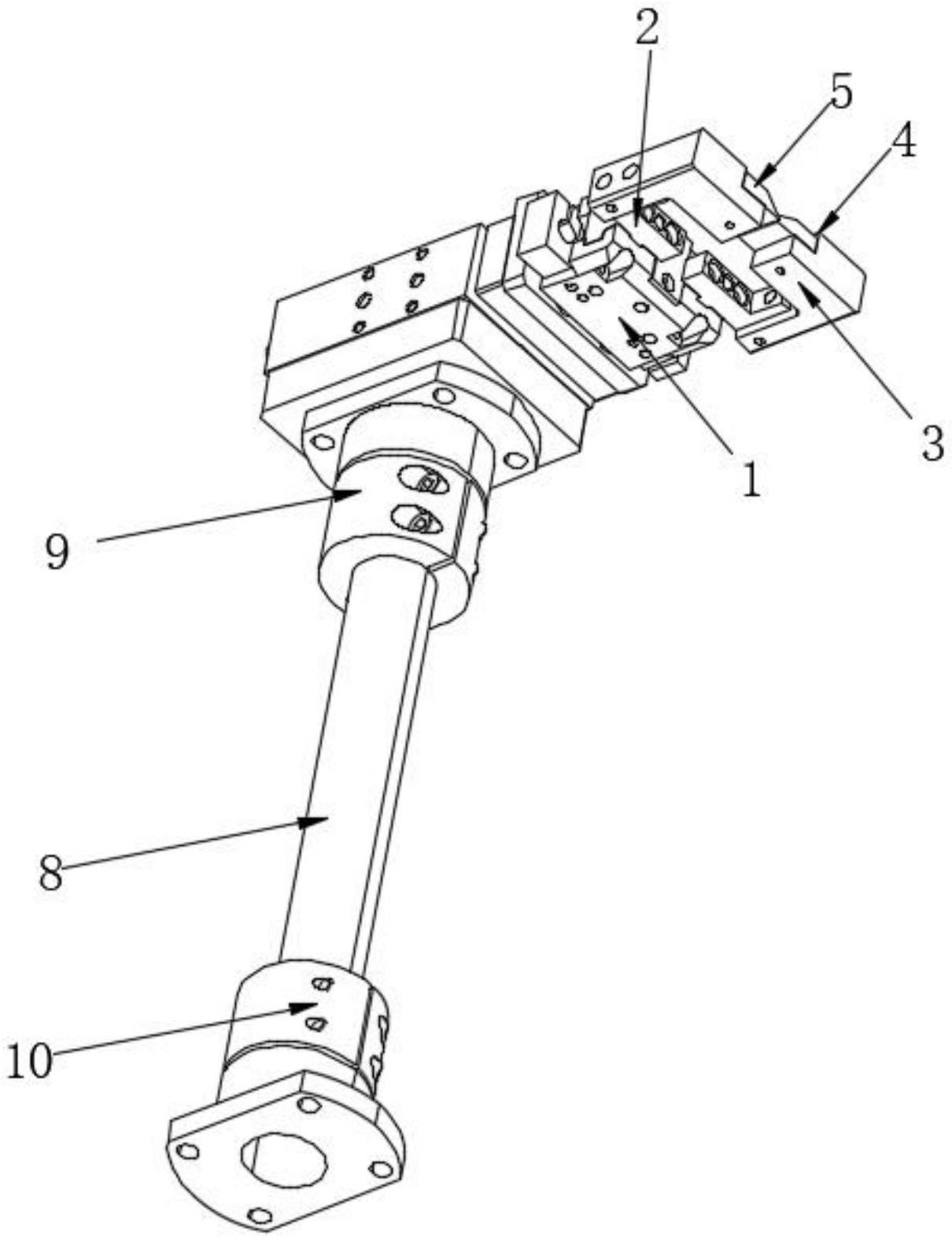
4.根据权利要求1所述的除胶机构,其特征在于:所述气缸夹爪还包括气缸(1)、传动组件(2),所述气缸(1)的端部连接有传动组件(2),所述传动组件(2)的侧部与夹爪臂(3)连接。
5.根据权利要求4所述的除胶机构,其特征在于:所述夹爪臂(3)上设有阶梯缺口,所述第一剪切块(4)与第二剪切块(5)分别安装在两组夹爪臂(3)上的阶梯缺口处,所述传动组件(2)的侧部与延伸杆(6)连接。
6.根据权利要求1所述的除胶机构,其特征在于:还包括调节组件,所述调节组件包括手动调节组件、气动推杆或电动推杆中的一种,所述调节组件的端部与气缸(1)连接。
7.根据权利要求6所述的除胶机构,其特征在于:所述手动调节组件包括双头螺杆(8)、第一螺纹座(9)和第二螺纹座(10),所述双头螺杆(8)的端部与第一螺纹座(9)连接,所述双头螺杆(8)的另一端与第二螺纹座(10)连接,所述气缸(1)的侧部与第一螺纹座(9)连接,所述第二螺纹座(10)上设有安装座。
技术总结
本技术提供一种除胶机构,包括除胶组件;所述除胶组件包括气缸夹爪、第一剪切块和第二剪切块,所述气缸夹爪包括两组夹爪臂,其中一组所述夹爪臂的侧部与第一剪切块,另一组所述夹爪臂与第二剪切块连接,所述第一剪切块的横截面由梯形和长方形组成,所述第二剪切块的横截面由三角形和长方形组成,所述气缸夹爪通过夹爪臂控制第一剪切块和第二剪切块开合,除去自动涂胶机出胶口尾胶。本技术除胶机构,第一剪切块和第二剪切块相向移动,以将即可将尾胶处理,避免影响喷胶加工效率,刮刀会与第一剪切块以及第二剪切块贴合刮除其表面尾胶,避免除胶效果变差。
技术研发人员:张大鹏
受保护的技术使用者:南京青缃自动化设备有限公司
技术研发日:20230328
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!