一种多工位快速点胶机的制作方法
本技术涉及点胶机,具体为一种多工位快速点胶机。
背景技术:
1、多工位快速点胶机是采用多组点胶头来进行点胶的设备,多组点胶头同步通过机械臂进行点胶动作,保证快速点胶。
2、现有的多工位快速点胶机一般使用螺丝将点胶头固定在机械臂上的安装板上,由于需要使得安装位置准确,需要对安装位置进行测量和对齐调节,这种螺丝固定的调节方式在实际使用过程中操作不便,不易对多组工位的点胶头进行位置对位,进而使得目前的多工位快速点胶机在进行点胶头的定位时,操作费时费力,不能满足使用需求,针对现有技术的不足,本实用新型提供了一种多工位快速点胶机,以解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种多工位快速点胶机,解决了现有的多工位快速点胶机不易对多组工位的点胶头进行位置对位,进而使得目前的多工位快速点胶机在进行点胶头的定位时,操作费时费力,不能满足使用需求的问题。
3、(二)技术方案
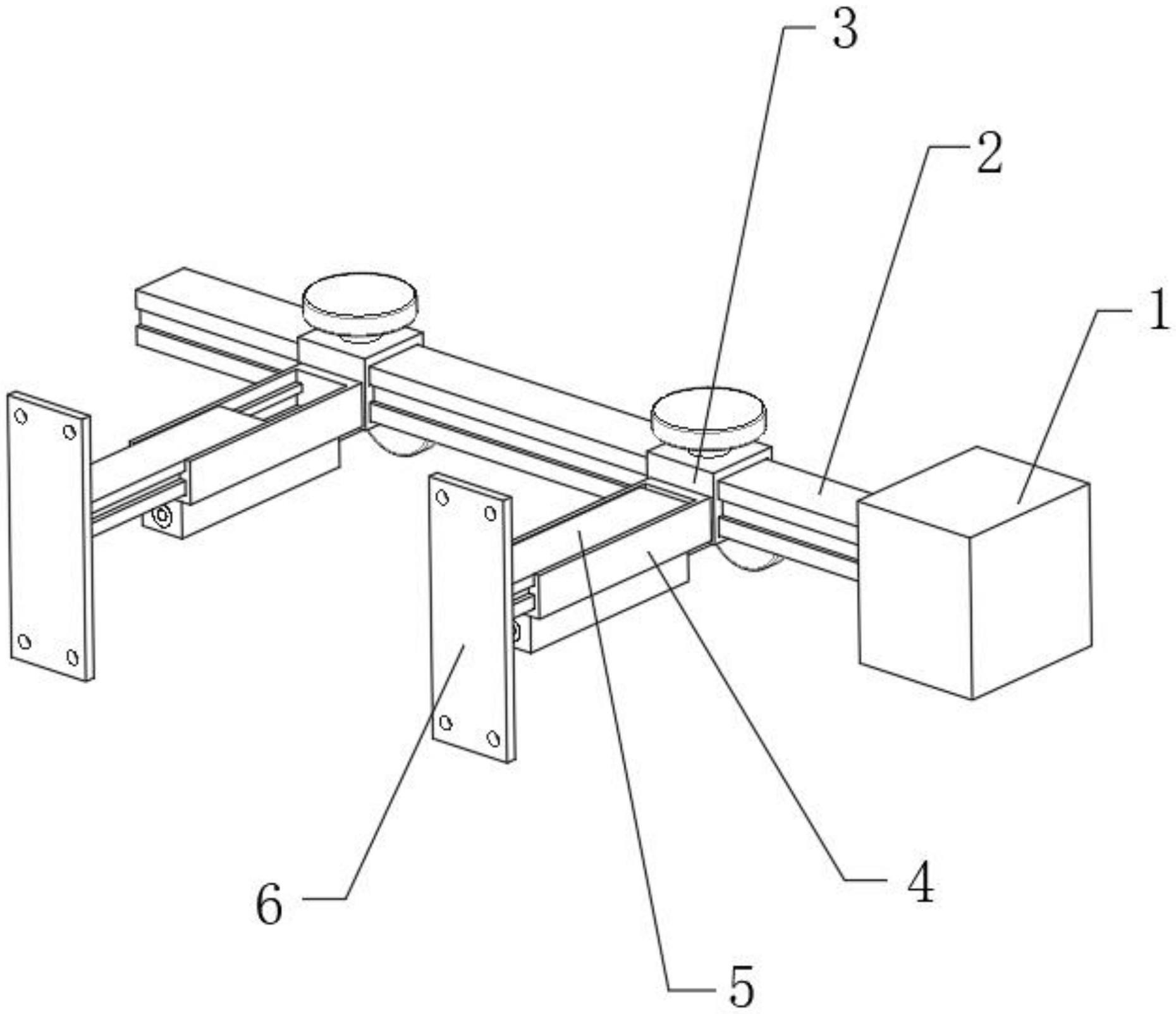
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种多工位快速点胶机,包括点胶机机械臂,所述点胶机机械臂上固定连接有多工位安装轨,所述多工位安装轨上设有多组点胶头安装板,所述点胶头安装板上固定胶头;
5、所述多工位安装轨上套接有多组承载套座,所述承载套座上固定连接有导轨座,所述导轨座上滑动连接有支撑臂,所述支撑臂用于对点胶头安装板支撑,所述导轨座的底部设有对支撑臂进行调节的位移机构。
6、优选的,所述位移机构包括连接座,所述连接座固定连接在导轨座的底部,所述连接座的内部设有具有位置调节功能的滑块,所述滑块与支撑臂之间固定连接有连接块。
7、优选的,所述连接座的内部转动连接有丝杆,所述丝杆与滑块螺纹连接。
8、优选的,所述丝杆上固定连接有转动把手。
9、优选的,所述点胶头安装板上开设有多组固定孔。
10、优选的,所述承载套座上固定连接有螺母座,所述螺母座的内部螺纹连接有卡紧螺栓,所述卡紧螺栓与多工位安装轨的表面卡紧。
11、优选的,所述导轨座的内侧固定连接有卡条,所述支撑臂的两侧开设有卡槽,所述卡条活动卡接在卡槽内。
12、本实用新型公开了一种多工位快速点胶机,其具备的有益效果如下:
13、该多工位快速点胶机,采用多工位安装轨来对多组点胶头安装板以及点胶头进行支撑限位,其中,多组承载套座在多工位安装轨上方便进行横向位置调节,各个承载套座、导轨座和支撑臂方便实现对点胶头安装板以及点胶头进行纵向位置调节,点胶头位置调整过程中对位调节方便,替换传统螺丝固定方式,使得点胶头定位过程省时省力,满足使用需求。
技术特征:
1.一种多工位快速点胶机,包括点胶机机械臂(1),所述点胶机机械臂(1)上固定连接有多工位安装轨(2),其特征在于:
2.根据权利要求1所述的一种多工位快速点胶机,其特征在于:所述位移机构(7)包括连接座(701),所述连接座(701)固定连接在导轨座(4)的底部,所述连接座(701)的内部设有具有位置调节功能的滑块(703),所述滑块(703)与支撑臂(5)之间固定连接有连接块(704)。
3.根据权利要求2所述的一种多工位快速点胶机,其特征在于:所述连接座(701)的内部转动连接有丝杆(702),所述丝杆(702)与滑块(703)螺纹连接。
4.根据权利要求3所述的一种多工位快速点胶机,其特征在于:所述丝杆(702)上固定连接有转动把手(705)。
5.根据权利要求1所述的一种多工位快速点胶机,其特征在于:所述点胶头安装板(6)上开设有多组固定孔(601)。
6.根据权利要求1所述的一种多工位快速点胶机,其特征在于:所述承载套座(3)上固定连接有螺母座(301),所述螺母座(301)的内部螺纹连接有卡紧螺栓(302),所述卡紧螺栓(302)与多工位安装轨(2)的表面卡紧。
7.根据权利要求1所述的一种多工位快速点胶机,其特征在于:所述导轨座(4)的内侧固定连接有卡条(401),所述支撑臂(5)的两侧开设有卡槽(501),所述卡条(401)活动卡接在卡槽(501)内。
技术总结
本技术公开一种多工位快速点胶机,涉及点胶机领域。该多工位快速点胶机包括点胶机机械臂,点胶机机械臂上固定连接有多工位安装轨,多工位安装轨上设有多组点胶头安装板,多工位安装轨上套接有多组承载套座,承载套座上固定连接有导轨座,导轨座上滑动连接有支撑臂,导轨座的底部设有对支撑臂进行调节的位移机构。该多工位快速点胶机采用多工位安装轨来对多组点胶头安装板以及点胶头进行支撑限位,其中,多组承载套座在多工位安装轨上方便进行横向位置调节,各个承载套座、导轨座和支撑臂方便实现对点胶头安装板以及点胶头进行纵向位置调节,点胶头位置调整过程中对位调节方便。
技术研发人员:李宁,张林
受保护的技术使用者:苏州楷徽智能装备有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!