多轴点胶机的制作方法
本技术涉及一种多轴点胶机。
背景技术:
1、多轴点胶机是一种专门对流体进行控制,并将流体点滴、涂覆于产品表面或产品内部的自动化机器。现有的门框、窗框、胶框等边框材料均会出现需要进行点胶的情况。
2、传统的多轴点胶机多为采用人工将待点胶件放置于可对待多轴点胶机进行点胶的点胶组件处对待点胶件进行点胶,而此种方式效率较低,且人工放置可能出现待点胶件放置偏移导致点胶出现误差的情况,自动化程度较低。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种多轴点胶机,其实现待点胶件的自动化送料,以及可实现对待点胶件的自动分拣、定位,且结构简单,体积较小。
2、本实用新型通过以下技术方案实现:
3、一种多轴点胶机,包括:
4、放料组件,所述放料组件可用于放置待点胶件,且所述放料组件设置有多组,多组放料组件所放置的待点胶件可为不同或相同长度;
5、分料组件,所述分料组件与放料组件连接,且所述分料组件设置有可伸至相邻两个待点胶件之间并对待点胶件进行分隔的分隔板;
6、接料组件,所述接料组件包括设置于所述分料组件下方的接料块,所述接料块设置有可用于接收所述分料组件分隔出的待点胶件的接料槽;
7、定位组件,所述定位组件包括位于所述接料槽一侧的第一定位件以及位于所述接料槽另一侧的第二定位件,所述接料槽接收的待点胶件设置于第一定位件与第二定位件之间,且所述第二定位件可朝向第一定位件移动并夹紧待点胶件。
8、进一步的,其还包括机架,所述第一定位件与所述机架固定连接,所述第二定位件与所述机架滑动连接。
9、进一步的,所述第二定位件固定连接有滑台气缸,所述滑台气缸与所述机架滑动连接并可带动所述第二定位件相对于所述机架滑动。
10、进一步的,所述接料块设置有至少一对,一对接料块分布于待点胶件的两端。
11、进一步的,所述接料块连接有举升组件;所述举升组件可带动所述接料块上下移动。
12、进一步的,所述举升组件包括一对支撑杆,一对支撑杆与一对接料块配接;所述支撑杆连接有举升气缸,所述举升气缸可驱动所述支撑杆上下运动。
13、进一步的,其还包括送料组件,所述送料组件设置于定位组件下方,且所述送料组件设置有可上下移动的送料夹爪,所述送料夹爪可移动至与所述待点胶件抵接并夹紧所述待点胶件。
14、进一步的,所述送料组件还连接有传送组件,所述传送组件与所述送料组件连接并可带动所述送料组件水平移动。
15、进一步的,其还包括点胶组件以及收料组件;所述传送组件包括驱动所述送料组件运动的第一传送带以及用于传送所述待点胶件的第二传送带;所述第一传送带可将所述送料组件传送至点胶组件下方,完成点胶后的工件可通过第二传送带传送至收料组件。
16、进一步的,所述收料组件包括可升降的收料夹爪,所述收料夹爪可夹持完成点胶后的工件并带动完成点胶后的工件上下运动。
17、相比于现有技术,本实用新型的优点在于:
18、1、通过设置分料组件,使得多个待点胶件可逐个落料至接料组件进行加工,且多个待点胶件可相互抵接,极大的减少了多轴点胶机的体积;且可使得待点胶件的落料更为稳定。
19、2、通过设置接料组件以及定位组件,实现对待点胶组件的接料以及定位,结构简单,且可保证待点胶组件的位置准确,并便于后续的点胶操作。
20、3、通过设置收料组件,实现对完成点胶后的工件进行定位便于后续的收料工作。
技术特征:
1.一种多轴点胶机,其特征在于,其包括:
2.根据权利要求1所述的多轴点胶机,其特征在于,其还包括机架(10),所述第一定位件(51)与所述机架(10)固定连接,所述第二定位件(52)与所述机架(10)滑动连接。
3.根据权利要求2所述的多轴点胶机,其特征在于,所述第二定位件(52)固定连接有滑台气缸(521),所述滑台气缸(521)与所述机架(10)滑动连接并可带动所述第二定位件(52)相对于所述机架(10)滑动。
4.根据权利要求1所述的多轴点胶机,其特征在于,所述接料块(41)设置有至少一对,一对接料块(41)分布于待点胶件(3)的两端。
5.根据权利要求4所述的多轴点胶机,其特征在于,所述接料块(41)连接有举升组件(42);所述举升组件(42)可带动所述接料块(41)上下移动。
6.根据权利要求5所述的多轴点胶机,其特征在于,所述举升组件(42)包括一对支撑杆(421),一对支撑杆(421)与一对接料块(41)配接;所述支撑杆(421)连接有举升气缸(422),所述举升气缸(422)可驱动所述支撑杆(421)上下运动。
7.根据权利要求1所述的多轴点胶机,其特征在于,其还包括送料组件(6),所述送料组件(6)设置于定位组件(5)下方,且所述送料组件(6)设置有可上下移动的送料夹爪(61),所述送料夹爪(61)可移动至与所述待点胶件(3)抵接并夹紧所述待点胶件(3)。
8.根据权利要求7所述的多轴点胶机,其特征在于,所述送料组件(6)还连接有传送组件(7),所述传送组件(7)与所述送料组件(6)连接并可带动所述送料组件(6)水平移动。
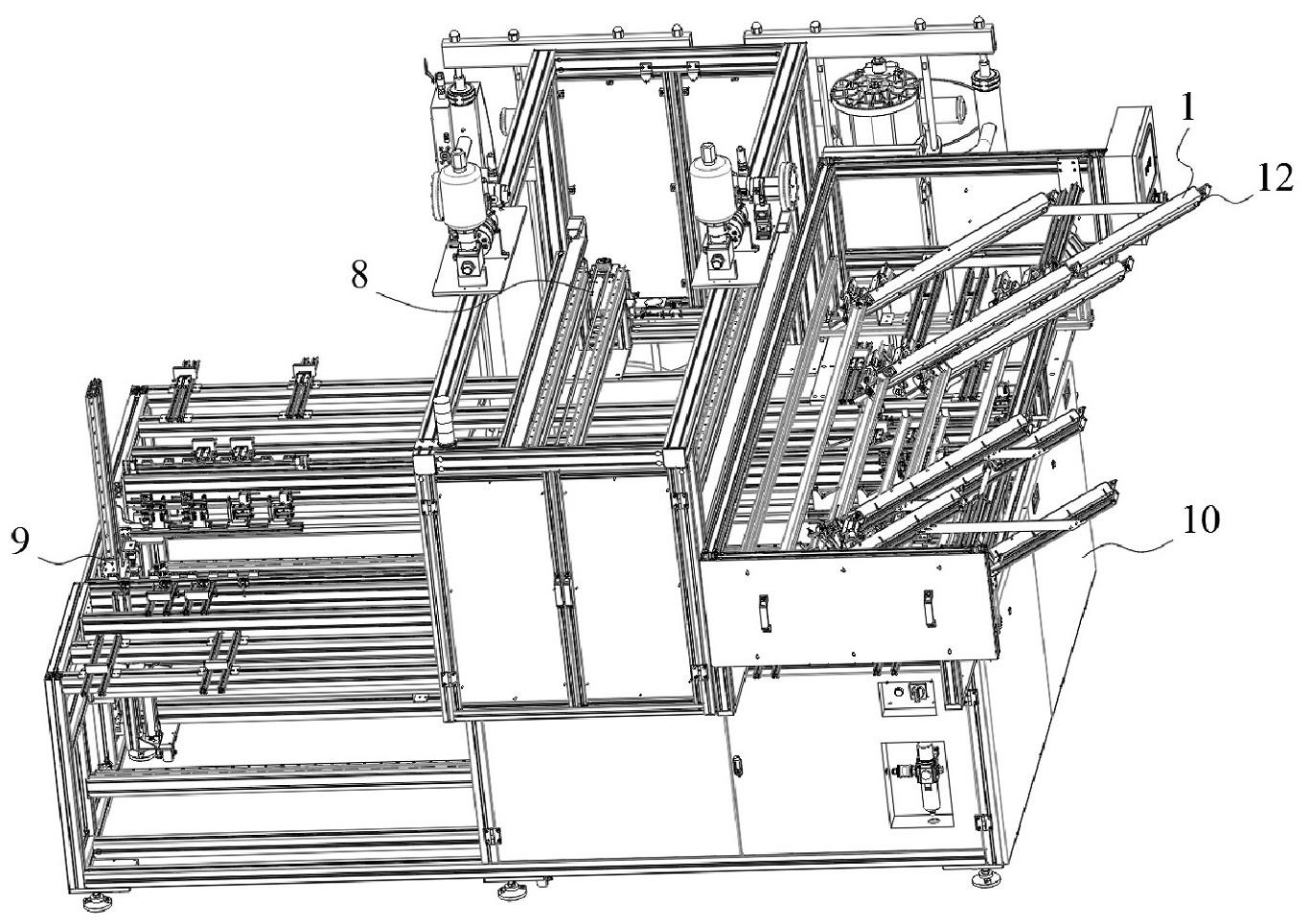
9.根据权利要求8所述的多轴点胶机,其特征在于,其还包括点胶组件(8)以及收料组件(9);所述传送组件(7)包括驱动所述送料组件(6)运动的第一传送带(71)以及用于传送所述待点胶件(3)的第二传送带(72);所述第一传送带(71)可将所述送料组件(6)传送至点胶组件(8)下方,完成点胶后的工件可通过第二传送带(72)传送至收料组件(9)。
10.根据权利要求9所述的多轴点胶机,其特征在于,所述收料组件(9)包括可升降的收料夹爪(91),所述收料夹爪(91)可夹持完成点胶后的工件并带动完成点胶后的工件上下运动。
技术总结
本技术公开了一种多轴点胶机,包括放料组件,放料组件放置有多个待点胶件;分料组件,分料组件与放料组件连接,且设置有可伸至相邻两个待点胶件之间并对待点胶件进行分隔的分隔板;接料组件,所述接料组件包括设置于所述分料组件下方的接料块,所述接料块设置有可用于接收所述分料组件分隔出的待点胶件的接料槽;定位组件,所述定位组件包括位于所述接料槽一侧的第一定位件以及位于所述接料槽另一侧的第二定位件,所述接料槽接收的待点胶件设置于第一定位件与第二定位件之间,且所述第二定位件可朝向第一定位件移动并夹紧待点胶件。本技术能够实现待点胶件的自动化送料,以及可实现对待点胶件的自动定位,且结构简单,体积较小。
技术研发人员:庞彦武,梁可夫,张剑峰,李加栋
受保护的技术使用者:博坤机电(苏州)有限公司
技术研发日:20230523
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!