水性陶瓷漆机器人涂装工作站的制作方法
本技术涉及水性陶瓷漆涂装,具体为水性陶瓷漆机器人涂装工作站。
背景技术:
1、水性陶瓷漆采用安全无毒配方,不含苯类、酮类、酯类、甲醛、游离tdi有毒重金属,水性陶瓷漆vov含量低,气味小,不燃烧,通过机器人涂装工作站,能够对将水性陶瓷涂装到工件上。
2、目前在对水性陶瓷漆进行涂装时,大都是需要人工来将工件搬运到工作台上,再通过机器人来对工件进行涂装操作,致使人员在搬运工件时较为费时费力的问题。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供水性陶瓷漆机器人涂装工作站。
技术实现思路
1、本实用新型的目的在于提供水性陶瓷漆机器人涂装工作站,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:水性陶瓷漆机器人涂装工作站,包括固定座和送料组件,所述固定座的顶部安置有机械臂,且机械臂的顶部设置有喷枪,所述机械臂的一侧设置有滑轨,用于自动上料的所述送料组件设置于滑轨的内部,所述送料组件包括滑座一、连接板一、托板、滑座二、连接板二、滑轮、导向轮和定位座,所述滑座一的顶部一端对称设置有连接板一,且滑座一的顶部中央转动连接有托板,所述托板的一端转动连接有滑座二,且滑座二的顶部一端设置有连接板二,所述滑座一和滑座二的两侧外端对称设置有滑轮,且滑座一和滑座二的两侧中部对称设置有导向轮,所述托板的顶部中央设置有定位座。
3、进一步的,所述滑轨的剖面呈c形,且滑轨与导向轮相贴合。
4、进一步的,所述送料组件的数量设置有多个,且相邻送料组件之间转动连接。
5、进一步的,所述连接板一之间的宽度与连接板二的宽度相等,且连接板一和连接板二的内部均开设有通孔。
6、进一步的,所述导向轮的大小小于滑轮的大小,且导向轮的轴向与滑轮的轴向相垂直。
7、进一步的,所述滑轨的中部外侧设置有用于防溅的防溅组件,所述防溅组件包括防溅罩和避让口,所述滑轨的中部外侧设置有防溅罩,且防溅罩的两侧均开设有避让口。
8、进一步的,所述防溅罩的侧面呈c形,且防溅罩的高度大于机械臂的高度。
9、进一步的,所述防溅组件还包括集液槽和抽气口,所述防溅罩的下端内部设置有集液槽,且防溅罩的顶部对称开设有抽气口。
10、本实用新型提供了水性陶瓷漆机器人涂装工作站,具备以下有益效果:
11、1、本实用新型通过送料组件的设置,滑座一和滑座二能够通过滑轮在滑轨上滑动,使得对工件送料时更加省力,同时导向轮与滑轨内侧贴合,使得滑座在滑轨弯曲处转向时更加稳定,并且还通过连接板一和连接板二的设置,便于对多个送料组件之间进行连接,从而只需利用牵引机便能使所有送料组件同步移动,以提高工件上下料时的效率;
12、2、本实用新型通过防溅组件的设置,当机械臂通过喷枪来对定位座上的工件进行涂装时,防溅罩能够对喷涂处的外侧进行遮罩,同时由于外部的抽气设备与抽气口连接,从而能够对喷涂时产生的异味空气进行收集,以便集中处理,并且还通过集液槽也便于对滴落的水性陶瓷漆余液进行收集。
技术特征:
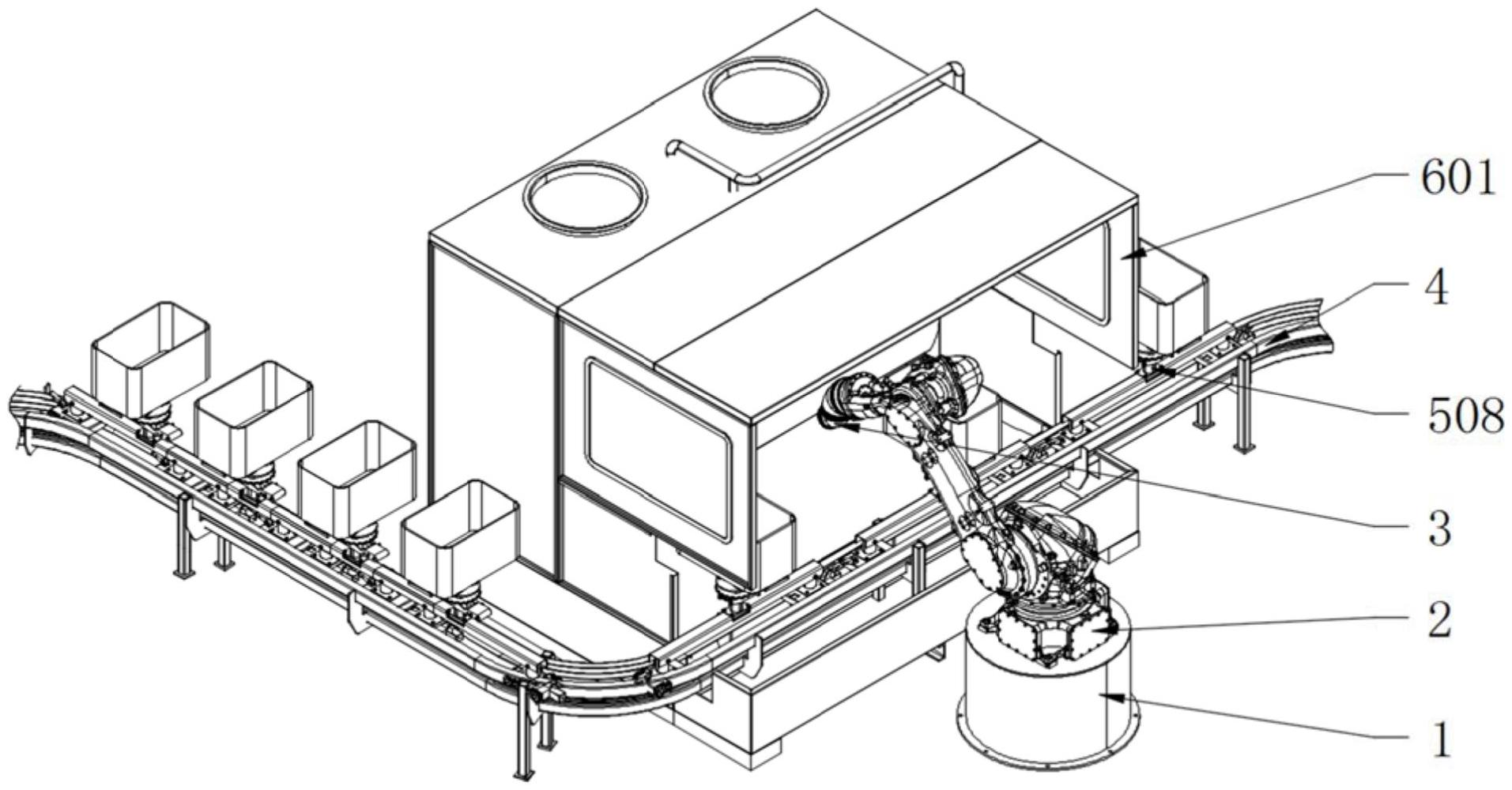
1.水性陶瓷漆机器人涂装工作站,包括固定座(1)和送料组件(5),其特征在于,所述固定座(1)的顶部安置有机械臂(2),且机械臂(2)的顶部设置有喷枪(3),所述机械臂(2)的一侧设置有滑轨(4),用于自动上料的所述送料组件(5)设置于滑轨(4)的内部,所述送料组件(5)包括滑座一(501)、连接板一(502)、托板(503)、滑座二(504)、连接板二(505)、滑轮(506)、导向轮(507)和定位座(508),所述滑座一(501)的顶部一端对称设置有连接板一(502),且滑座一(501)的顶部中央转动连接有托板(503),所述托板(503)的一端转动连接有滑座二(504),且滑座二(504)的顶部一端设置有连接板二(505),所述滑座一(501)和滑座二(504)的两侧外端对称设置有滑轮(506),且滑座一(501)和滑座二(504)的两侧中部对称设置有导向轮(507),所述托板(503)的顶部中央设置有定位座(508)。
2.根据权利要求1所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述滑轨(4)的剖面呈c形,且滑轨(4)与导向轮(507)相贴合。
3.根据权利要求1所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述送料组件(5)的数量设置有多个,且相邻送料组件(5)之间转动连接。
4.根据权利要求1所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述连接板一(502)之间的宽度与连接板二(505)的宽度相等,且连接板一(502)和连接板二(505)的内部均开设有通孔。
5.根据权利要求1所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述导向轮(507)的大小小于滑轮(506)的大小,且导向轮(507)的轴向与滑轮(506)的轴向相垂直。
6.根据权利要求1所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述滑轨(4)的中部外侧设置有用于防溅的防溅组件(6),所述防溅组件(6)包括防溅罩(601)和避让口(602),所述滑轨(4)的中部外侧设置有防溅罩(601),且防溅罩(601)的两侧均开设有避让口(602)。
7.根据权利要求6所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述防溅罩(601)的侧面呈c形,且防溅罩(601)的高度大于机械臂(2)的高度。
8.根据权利要求6所述的水性陶瓷漆机器人涂装工作站,其特征在于,所述防溅组件(6)还包括集液槽(603)和抽气口(604),所述防溅罩(601)的下端内部设置有集液槽(603),且防溅罩(601)的顶部对称开设有抽气口(604)。
技术总结
本技术公开了水性陶瓷漆机器人涂装工作站,涉及水性陶瓷漆涂装技术领域,包括固定座和送料组件,所述固定座的顶部安置有机械臂,且机械臂的顶部设置有喷枪,所述机械臂的一侧设置有滑轨,用于自动上料的所述送料组件设置于滑轨的内部,所述送料组件包括滑座一、连接板一、托板、滑座二、连接板二、滑轮、导向轮和定位座。该水性陶瓷漆机器人涂装工作站通过送料组件的设置,滑座一和滑座二能够通过滑轮在滑轨上滑动,使得对工件送料时更加省力,同时导向轮与滑轨内侧贴合,使得滑座在滑轨弯曲处转向时更加稳定,并且还通过连接板一和连接板二的设置,便于对多个送料组件之间进行连接,从而只需利用牵引机便能使所有送料组件同步移动。
技术研发人员:蒋镇,蒋方亮,吴小燕,蒋悠
受保护的技术使用者:锦科绿色科技(苏州)有限公司
技术研发日:20230705
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!