一种破料机器人减震缓冲装置的制作方法
本技术属于回转窑结圈料破碎设备,特别涉及一种破料机器人减震缓冲装置。
背景技术:
1、机器人技术将现场操作人员从重复性、重体力、现场工作环境恶劣、安全风险高的工作中解放出来,规避现场作业过程中的安全风险。
2、为了消除回转窑生产中的有害结圈,在机器人手爪对结圈料进行破碎的基础上,机器人手爪的风镐提供冲击力,通过端部的破碎锤将结圈料冲击破碎,在这个过程中,震动对设备本身的冲击力也很大,而机器的精度要求很高,过大的震动就会对机器造成伤害,影响使用寿命。
技术实现思路
1、本实用新型为克服现有技术存在的问题,提供如下技术方案:
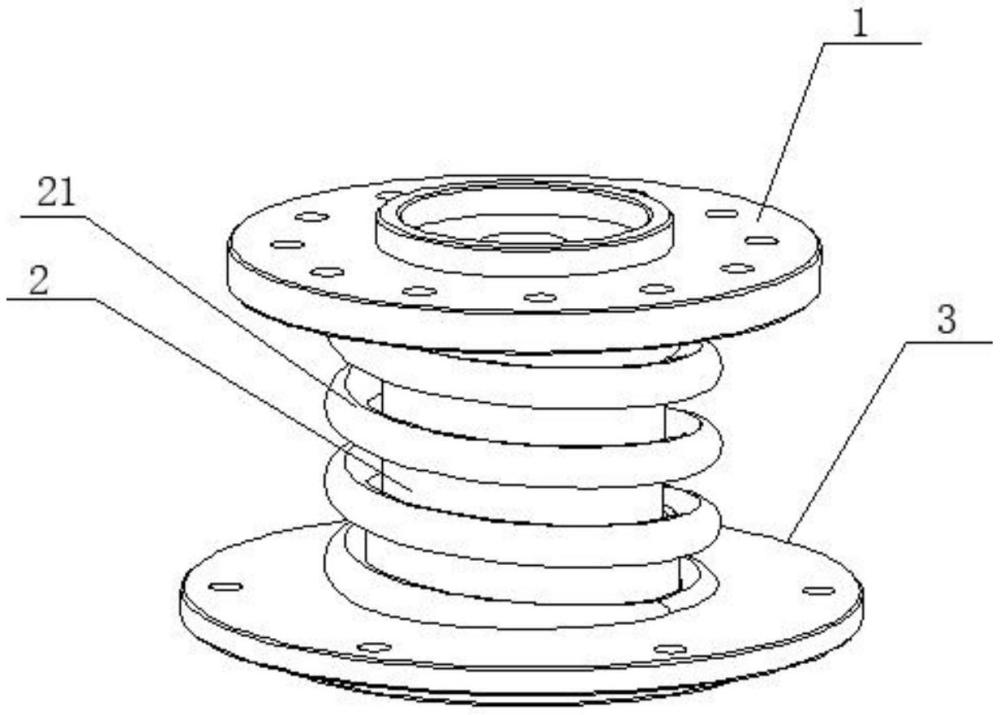
2、一种破料机器人减震缓冲装置,所述减震缓冲装置用于连接破料手爪与工业机器人,减震缓冲装置安装在破料手爪与工业机器人之间,所述减震缓冲装置包括:
3、机器人端法兰盘,所述机器人端法兰盘固定安装在工业机器人上;
4、手爪端法兰盘,所述手爪端法兰盘固定安装在破料手爪上;
5、减震柱,所述减震柱设置在机器人端法兰盘与手爪端法兰盘之间;
6、其中,所述机器人端法兰盘中间设有第一安装孔,第一固定件通过第一安装孔将机器人端法兰盘固定在减震柱上,所述手爪端法兰盘中间设有第二安装孔,第二固定件通过第二安装孔将手爪端法兰盘固定在减震柱上。
7、进一步地,所述减震柱内设有嵌入件,嵌入件粘接于减震柱内壁,所述嵌入件位于靠近机器人端法兰盘的一端。
8、进一步地,所述嵌入件内设有第三安装孔,第一固定件的端部与嵌入件的第三安装孔配合,并且嵌入件的嵌入深度能够通过第一固定件进行调节。
9、进一步地,所述破料手爪包括框架,框架内安装风镐连接破碎锤,所述手爪端法兰盘固定在框架侧面上。
10、进一步地,所述框架、风镐、破碎锤的安装方向是沿着风镐的轴线方向,所述减震缓冲装置的安装方向是与风镐的轴线方向垂直。
11、进一步地,所述减震柱与手爪端法兰盘之间设有垫片,垫片中间设有第三安装孔,第二固定件穿过第三安装孔固定。
12、进一步地,所述减震柱的材质选择为柔性材料。
13、进一步地,所述减震缓冲装置的机器人端法兰盘到手爪端法兰盘的总高度为120-160mm。
14、进一步地,所述减震柱上套有弹簧。
15、进一步地,所述弹簧采用碳素钢丝,钢丝直径12-16mm,弹簧的圈数为≥5圈。
16、本实用新型的有益效果:本实用新型连接在破碎手爪上使用,破碎手爪通过风镐提供冲击力,通过端部的破碎锤将结圈料冲击破碎,而增加了减震缓冲装置后,能够为破碎时提供减震,减少破碎时对机器人的多个方向的冲击,防止对过大的震动对机器造成伤害影响机器精度。
17、本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种破料机器人减震缓冲装置,其特征在于:所述减震缓冲装置用于连接破料手爪(5)与工业机器人(6),减震缓冲装置安装在破料手爪(5)与工业机器人(6)之间,所述减震缓冲装置包括:
2.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述减震柱(2)内设有嵌入件(4),嵌入件(4)粘接于减震柱(2)内壁,所述嵌入件(4)位于靠近机器人端法兰盘(1)的一端。
3.如权利要求2所述的破料机器人减震缓冲装置,其特征在于:所述嵌入件(4)内设有第三安装孔,第一固定件的端部与嵌入件(4)的第三安装孔配合,并且嵌入件(4)的嵌入深度能够通过第一固定件进行调节。
4.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述破料手爪(5)包括框架(51),框架(51)内安装风镐连接破碎锤,所述手爪端法兰盘(3)固定在框架(51)侧面上。
5.如权利要求4所述的破料机器人减震缓冲装置,其特征在于:所述框架(51)、风镐、破碎锤的安装方向是沿着风镐的轴线方向,所述减震缓冲装置的安装方向是与风镐的轴线方向垂直。
6.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述减震柱(2)与手爪端法兰盘(3)之间设有垫片(31),垫片(31)中间设有第三安装孔,第二固定件穿过第三安装孔固定。
7.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述减震柱(2)的材质选择为柔性材料。
8.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述减震缓冲装置的机器人端法兰盘(1)到手爪端法兰盘(3)的总高度为120-160mm。
9.如权利要求1所述的破料机器人减震缓冲装置,其特征在于:所述减震柱(2)上套有弹簧(21)。
10.如权利要求9所述的破料机器人减震缓冲装置,其特征在于:所述弹簧(21)采用碳素钢丝,钢丝直径12-16mm,弹簧(21)的圈数为≥5圈。
技术总结
本技术涉及一种破料机器人减震缓冲装置,属于回转窑结圈料破碎设备技术领域,减震缓冲装置安装在破料手爪与工业机器人之间,所述减震缓冲装置包括机器人端法兰盘,所述机器人端法兰盘固定安装在工业机器人上;手爪端法兰盘,所述手爪端法兰盘固定安装在破料手爪上;减震柱,所述减震柱设置在机器人端法兰盘与手爪端法兰盘之间;所述机器人端法兰盘中间设有第一安装孔,第一固定件通过第一安装孔将机器人端法兰盘固定在减震柱上。本技术连接在破碎手爪上使用,增加了减震缓冲装置后,能够为破碎时提供减震,减少破碎时对机器人的多个方向的冲击。
技术研发人员:曾桥德,张德召,周劲松,何礼仁,唐朝辉,李建瑜,陈莉,李强,陈得君
受保护的技术使用者:成都星云智联科技有限公司
技术研发日:20230817
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!