一种物料自动分拣机器人的制作方法
1.本实用新型涉及机器人领域,尤其是一种物料自动分拣机器人。
背景技术:
2.目前,工厂内的分拣处理能力较大,分拣分类数量也较多。采用人工分拣的方法,生产效率很低、误差多。随着工业的发展,自动化水平越来越高,自动分拣正是自动化中的一个必不可的部分,自动化分拣装置必然会取代人工的分拣工作。因此发明一种物料自动分拣机器人实现物料的自动化分拣。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种物料自动分拣机器人。
4.为实现上述目的,本实用新型提供如下技术方案如下。
5.一种物料自动分拣机器人,其特征在于,包括旋转式万向轮、底座、控制面板、机械臂及识别装置;所述底座上设有障碍传感器;所述控制面板设置于所述底座上部,所述控制面板内设置有控制器和蓄电池,所述控制面板上设有显示屏及开/关机按钮;所述控制器与所述蓄电池连接,所述显示屏及所述开/关机按钮与所述控制器连接;所述机械臂位于所述控制面板上部,所述机械臂远离控制面板的另一头设置有机械爪;所述识别装置设置于所述机械爪上方。
6.优选的,所述旋转式万向轮固定设置于所述底座下部,所述旋转式万向轮与所述控制器连接。
7.优选的,所述识别装置安装于所述机械臂上,所述识别装置与所述控制器通过导线连接。
8.优选的,所述识别装置为视觉传感器。
9.优选的,所述机械臂与所述控制器连接。
10.优选的,所述底座后面设有充电插口,所述充电插口与所述蓄电池连接。
11.与现有技术相比,本实用新型的有益效果是:
12.1、设备结构简单,具有物料自动分拣功能,通过识别装置来识别物料颜色、体积型号。
13.2、通过障碍传感器可感知机器人前进路径上的障碍,让机器人避开障碍物。
附图说明
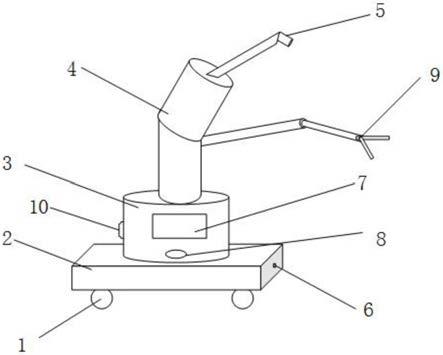
14.图1为本实用新型的结构示意图。
15.图2为本实用新型部份连接示意图。
16.图例说明:1
‑
旋转式万向轮;2
‑
底座;3
‑
控制面板;4
‑
机械臂;5
‑
识别装置;6
‑
障碍传感器;7
‑
显示屏;8
‑
开/关机按钮;9
‑
机械爪;10
‑
充电插口;31
‑
控制器;32
‑
蓄电池。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.下面结合附图与具体实例对本实用新型进行详细说明。
19.参照图1,一种物料自动分拣机器人,其特征在于,包括旋转式万向轮1、底座2、控制面板3、机械臂4及识别装置5。底座2上设有障碍传感器6,控制面板3设置于底座2上部,控制面板3内设置有控制器31和蓄电池32,控制面板3上设有显示屏7及开/关机按钮 8。控制器31与蓄电池32连接,显示屏7及开/关机按钮8与控制器31连接。机械臂4位于控制面板3上部,机械臂4远离控制面板3的另一头设置有机械爪9,机械臂4与所述控制器31连接。机械爪9设置于识别装置5上方,识别装置5安装于机械臂4上,识别装置5与控制器31通过导线连接,识别装置5为视觉传感器。旋转式万向轮1固定设置于所述底座2 下部,旋转式万向轮1与控制器31连接。底座2后面设有充电插口10,充电插口10与蓄电池32连接。
20.本实用新型的有益效果是,设备结构简单,具有物料自动分拣功能,通过识别装置来识别物料颜色、体积型号;通过障碍传感器可感知机器人前进路径上的障碍,让机器人避开障碍物。
21.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
技术特征:
1.一种物料自动分拣机器人,其特征在于,包括旋转式万向轮(1)、底座(2)、控制面板(3)、机械臂(4)及识别装置(5);所述底座(2)上设有障碍传感器(6);所述控制面板(3)设置于所述底座(2)上部,所述控制面板(3)内设置有控制器(31)和蓄电池(32),所述控制面板(3)上设有显示屏(7)及开/关机按钮(8);所述控制器(31)与所述蓄电池(32)连接,所述显示屏(7)及所述开/关机按钮(8)与所述控制器(31)连接;所述机械臂(4)位于所述控制面板(3)上部,所述机械臂(4)远离控制面板(3)的另一头设置有机械爪(9);所述识别装置(5)设置于所述机械爪(9)上方。2.如权利要求1所述的一种物料自动分拣机器人,其特征在于,所述旋转式万向轮(1)固定设置于所述底座(2)下部,所述旋转式万向轮(1)与所述控制器(31)连接。3.如权利要求2所述的一种物料自动分拣机器人,其特征在于,所述识别装置(5)安装于所述机械臂(4)上,所述识别装置(5)与所述控制器(31)通过导线连接。4.如权利要求1所述的一种物料自动分拣机器人,其特征在于,所述识别装置(5)为视觉传感器。5.如权利要求1所述的一种物料自动分拣机器人,其特征在于,所述机械臂(4)与所述控制器(31)连接。6.如权利要求1所述的一种物料自动分拣机器人,其特征在于,所述底座(2)后面设有充电插口(10),所述充电插口(10)与所述蓄电池(32)连接。
技术总结
本实用新型公开了一种物料自动分拣机器人,其特征在于,包括旋转式万向轮、底座、控制面板、机械臂及识别装置;所述底座上设有障碍传感器;所述控制面板设置于所述底座上部,所述控制面板内设置有控制器和蓄电池,所述控制面板上设有显示屏及开/关机按钮;所述控制器与所述蓄电池连接,所述显示屏及所述开/关机按钮与所述控制器连接;所述机械臂位于所述控制面板上部,所述机械臂远离控制面板的另一头设置有机械爪;所述识别装置设置于所述机械爪上方。本实用新型提供了一种物料自动分拣机器人,设备结构简单,具有物料自动分拣功能,可通过障碍传感器可感知机器人前进路径上的障碍。过障碍传感器可感知机器人前进路径上的障碍。过障碍传感器可感知机器人前进路径上的障碍。
技术研发人员:李轶群 王林杰 梁浩 张为社 周富强 李世雄 安伯龙 臧坤 张舒 赵帝 沈明强 沈文迪 刘博
受保护的技术使用者:景能科技有限公司
技术研发日:2020.08.31
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1