一种平面检测自动化设备的制作方法
1.本实用新型涉及检测装置技术领域,尤其是一种平面检测自动化设备。
背景技术:
2.1u服务器就是一种高可用高密度的低成本服务器平台,是专门为特殊应用行业和高密度计算机环境设计的。它们可以通过本地硬盘启动自己的操作系统,如windowsnt/2000/2003、linux、solaris等等,类似于一个个独立的服务器。在这种模式下,每一个主板运行自己的系统,服务于指定的不同用户群,相互之间没有关联。不过我们还是可以用系统软件将这些主板集合成一个服务器集群。
3.1u服务器在生产之后需要进行平面平整度检测,目前行业应用中,采用的是人工检测的方式来检测1u产品的平面,这种方式不但检测效率低,而且检测的误差比较大,从而导致检测的数据准确度不高,并且人工成本也越来越高。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的问题,提出一种能够提高精度降低人工成本的平面检测自动化设备。
5.本实用新型的技术方案:一种平面检测自动化设备,包括:
6.机架;
7.用于抓取产品进行检测的机器人手抓;
8.两组用于对产品进行检测的光电开关;
9.用于控制机器人手抓沿前后方向和横向移动的移动模组;
10.移动模组设置在机架上,机器人手抓设置在移动模组上,两组光电开关均设置在移动模组上,两组光电开关沿纵向分布,上方的光电开关与移动模组滑动连接。
11.优选的,移动模组包括:
12.两个平行设置在机架上的导轨,两个导轨均沿前后方向延伸;
13.用于安装机器人手抓并引导其沿横向移动的直线导轨模组,直线导轨模组滑动设置在两个导轨上的,机器人手抓滑动设置在直线导轨模组上,机器人手抓沿横向移动,机器人手抓上设置有机器人末端法兰;两组光电开关均设置在直线导轨模组上,两组光电开关沿纵向分布,上方的光电开关与直线导轨模组滑动连接;
14.用于与直线导轨模组螺纹连接带动其沿前后方向移动的螺纹杆,螺纹杆转动设置在机架上,螺纹杆沿前后方向延伸;
15.用于控制机器人手抓移动的皮带传动机构,皮带传动机构设置在直线导轨模组上;
16.用于驱动皮带传动机构工作的伺服电机,伺服电机设置在机架上;
17.用于控制上方的光电开关滑动的滚珠丝杆,滚珠丝杆转动设置在直线导轨模组上,滚珠丝杆与上方的光电开关螺纹连接。
18.优选的,手轮;手轮设置在螺纹杆上,手轮上设置有摇把。
19.优选的,还包括两个用于显示装置工作状态的三色灯,两个三色灯均设置在机架上。
20.优选的,还包括四个用于支撑机架的地脚,四个地脚呈矩形分布设置在机架底部。
21.优选的,还包括四个用于控制机架移动的脚轮,四个脚轮呈矩形分布设置在机架底部。
22.与现有技术相比,本实用新型具有如下有益的技术效果:
23.本实用新型使用时,通过设置两个光电开关对u产品进行平面检测,大大的提高了检测的安全性和检测精度。
24.现有技术条件下,工人负责检测,应用此设备之后,可省人工降低企业的人工成本。
25.本实用新型通过设置三色灯,能够直观的观察装置的工作状态;通过设置地脚,能够便于对机架支撑;通过设置脚轮,便于移动本装置。
附图说明
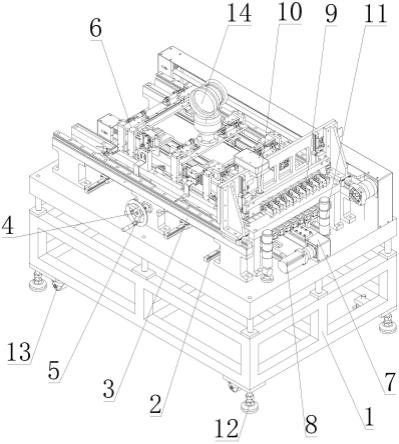
26.图1为本实用新型提出的一种实施例的立体结构示意图。
27.图2为本实用新型提出的一种实施例的平面结构示意图。
28.附图标记:1、机架;2、导轨;3、直线导轨模组;4、螺纹杆;5、手轮;6、机器人手抓;7、皮带传动机构;8、伺服电机;9、光电开关;10、滚珠丝杆;11、三色灯;12、地脚;13、脚轮;14、机器人末端法兰。
具体实施方式
29.实施例一
30.如图1-2所示,本实用新型提出的一种平面检测自动化设备,包括机架1、机器人手抓6、移动模组和两组光电开关9。机器人手抓6用于抓取产品进行检测,两组检测光电开关9用于对产品进行,移动模组用于控制机器人手抓6沿前后方向和横向移动,移动模组设置在机架1上,机器人手抓6设置在移动模组上,两组光电开关9均设置在移动模组上,两组光电开关9沿纵向分布,上方的光电开关9与移动模组滑动连接。
31.如图1-2所示,移动模组包括两个导轨2、直线导轨模组3、螺纹杆4、手轮5、皮带传动机构7、伺服电机8和滚珠丝杆10。两个导轨2平行设置在机架1上,两个导轨2均沿前后方向延伸。直线导轨模组3用于安装机器人手抓6并引导其沿横向移动,直线导轨模组3滑动设置在两个导轨2上,机器人手抓6滑动设置在直线导轨模组3上,机器人手抓6沿横向移动,机器人手抓上设置有机器人末端法兰14。两组光电开关9均设置在直线导轨模组3上,两组光电开关9沿纵向分布,上方的光电开关9与直线导轨模组3滑动连接。螺纹杆4用于与直线导轨模组3螺纹连接带动其沿前后方向移动,螺纹杆4转动设置在机架1上,螺纹杆4沿前后方向延伸,手轮5设置在螺纹杆4上,手轮5上设置有摇把。皮带传动机构7用于控制机器人手抓6移动,皮带传动机构7设置在直线导轨模组3上,伺服电机8用于驱动皮带传动机构7工作,伺服电机8设置在机架1上。滚珠丝杆10用于控制上方的光电开关9滑动,滚珠丝杆10转动设置在直线导轨模组3上,滚珠丝杆10与上方的光电开关9螺纹连接。
32.本实施例的工作原理是通过plc控制气缸、伺服电机8、机器人手抓6等执行元件运作,由气动元件、伺服电机8、机器人手抓6做驱动源,以实现自动循环工作。使用时,机器人将1u产品抓取放在机架1的机器人手抓6上,再按启动按钮。伺服电机8带动皮带传动机构7工作,皮带传动机构7控制机器人手抓6实现左右移动,并且通过对射光电开关9来检测1u产品的平面度。然后机器人手抓6把检测好的产品合格的放入良品架上,不良品放入不良品架上,然后再继续抓取下一下工件放入机器人手抓6上,依次循环。
33.实施例二
34.如图1-2所示,相较于实施例一,本实施例中还包括两个用于显示装置工作状态的三色灯11,两个三色灯11均设置在机架1上。四个用于支撑机架1的地脚12,四个地脚12呈矩形分布设置在机架1底部。四个用于控制机架1移动的脚轮13,四个脚轮13呈矩形分布设置在机架1底部。
35.本实施例通过设置三色灯11,能够直观的观察装置的工作状态;通过设置地脚12,能够便于对机架1支撑;通过设置脚轮13,便于移动本装置。
36.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
技术特征:
1.一种平面检测自动化设备,其特征在于,包括:机架(1);用于抓取产品进行检测的机器人手抓(6);两组用于对产品进行检测的光电开关(9);用于控制机器人手抓(6)沿前后方向和横向移动的移动模组;移动模组设置在机架(1)上,机器人手抓(6)设置在移动模组上,两组光电开关(9)均设置在移动模组上,两组光电开关(9)沿纵向分布,上方的光电开关(9)与移动模组滑动连接。2.根据权利要求1所述的一种平面检测自动化设备,其特征在于,移动模组包括:两个平行设置在机架(1)上的导轨(2),两个导轨(2)均沿前后方向延伸;用于安装机器人手抓(6)并引导其沿横向移动的直线导轨模组(3),直线导轨模组(3)滑动设置在两个导轨(2)上的,机器人手抓(6)滑动设置在直线导轨模组(3)上,机器人手抓(6)沿横向移动,机器人手抓上设置有机器人末端法兰(14);两组光电开关(9)均设置在直线导轨模组(3)上,两组光电开关(9)沿纵向分布,上方的光电开关(9)与直线导轨模组(3)滑动连接;用于与直线导轨模组(3)螺纹连接带动其沿前后方向移动的螺纹杆(4),螺纹杆(4)转动设置在机架(1)上,螺纹杆(4)沿前后方向延伸;用于控制机器人手抓(6)移动的皮带传动机构(7),皮带传动机构(7)设置在直线导轨模组(3)上;用于驱动皮带传动机构(7)工作的伺服电机(8),伺服电机(8)设置在机架(1)上;用于控制上方的光电开关(9)滑动的滚珠丝杆(10),滚珠丝杆(10)转动设置在直线导轨模组(3)上,滚珠丝杆(10)与上方的光电开关(9)螺纹连接。3.根据权利要求2所述的一种平面检测自动化设备,其特征在于,手轮(5);手轮(5)设置在螺纹杆(4)上,手轮(5)上设置有摇把。4.根据权利要求3所述的一种平面检测自动化设备,其特征在于,还包括两个用于显示装置工作状态的三色灯(11),两个三色灯(11)均设置在机架(1)上。5.根据权利要求4所述的一种平面检测自动化设备,其特征在于,还包括四个用于支撑机架(1)的地脚(12),四个地脚(12)呈矩形分布设置在机架(1)底部。6.根据权利要求5所述的一种平面检测自动化设备,其特征在于,还包括四个用于控制机架(1)移动的脚轮(13),四个脚轮(13)呈矩形分布设置在机架(1)底部。
技术总结
本实用新型涉及一种平面检测自动化设备,属于检测装置技术领域。其主要针对现有装置检测精度低成本高的问题,提出如下技术方案:包括:机架;用于抓取产品进行检测的机器人手抓;两组用于对产品进行检测光电开关;用于控制机器人手抓沿前后方向和横向移动的移动模组;移动模组设置在机架上,机器人手抓设置在移动模组上,两组光电开关均设置在移动模组上,两组光电开关沿纵向分布,上方的光电开关与移动模组滑动连接。本实用新型能够降低检测成本,提高检测精度。高检测精度。高检测精度。
技术研发人员:陈宝燕 徐爽琼
受保护的技术使用者:广州维发自动化设备有限公司
技术研发日:2022.08.04
技术公布日:2022/11/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1