一种基于视觉识别的自动分拣机械臂的制作方法
本发明涉及机械设备,尤其是涉及一种基于视觉识别的自动分拣机械臂。
背景技术:
1、传统的生产过程中都是有人工来完成工件的抓取、搬运、安装,生产效率低,工作危险性大,劳动力费用高,工作强度高,作业人员更换率较高。
2、为了解决以上问题,现有技术中采用抓取设备来完成以上操作。现有的抓取设备通常没有视觉辅助系统,其构造仅仅是单一的气动夹具装置。工作过程中,机械手“盲目地”对工件进行抓取,在快节奏的生产中,机械手所抓取的工件,可能存在角度上的偏移或者无法准确的抓取工件,从而导致工件就不能准确的放入放置工装,甚至是损坏工件。
3、中国经济在稳步中高速向前发展,但随着中国社会老龄化程度的不断上升和人工成本的不断提高,随着科技的不断发展,中国的制造生产业会更加趋向于向全自动化的机械流水线方向发展。为了在快节奏的生产过程中更加准确的抓取工件,即使工件的位置稍有偏移也能对工件进行准确抓取,现有技术中亟需一种带视觉识别水平关节机械手,与传统的人工抓取、搬运、安装相比,具有定位迅速、重复性好、复用性强、长期稳定、耐疲劳、使用寿命长的优点。
技术实现思路
1、本发明的目的是提供一种基于视觉识别的自动分拣机械臂,通过将视觉识别系统的图像识别以及对机械手的控制,从而实现机械手准确的抓取产品,并且调节产品的角度,能够精准的将产品放入放置工装,不仅提高了工作效率,还降低了产品的损坏率。
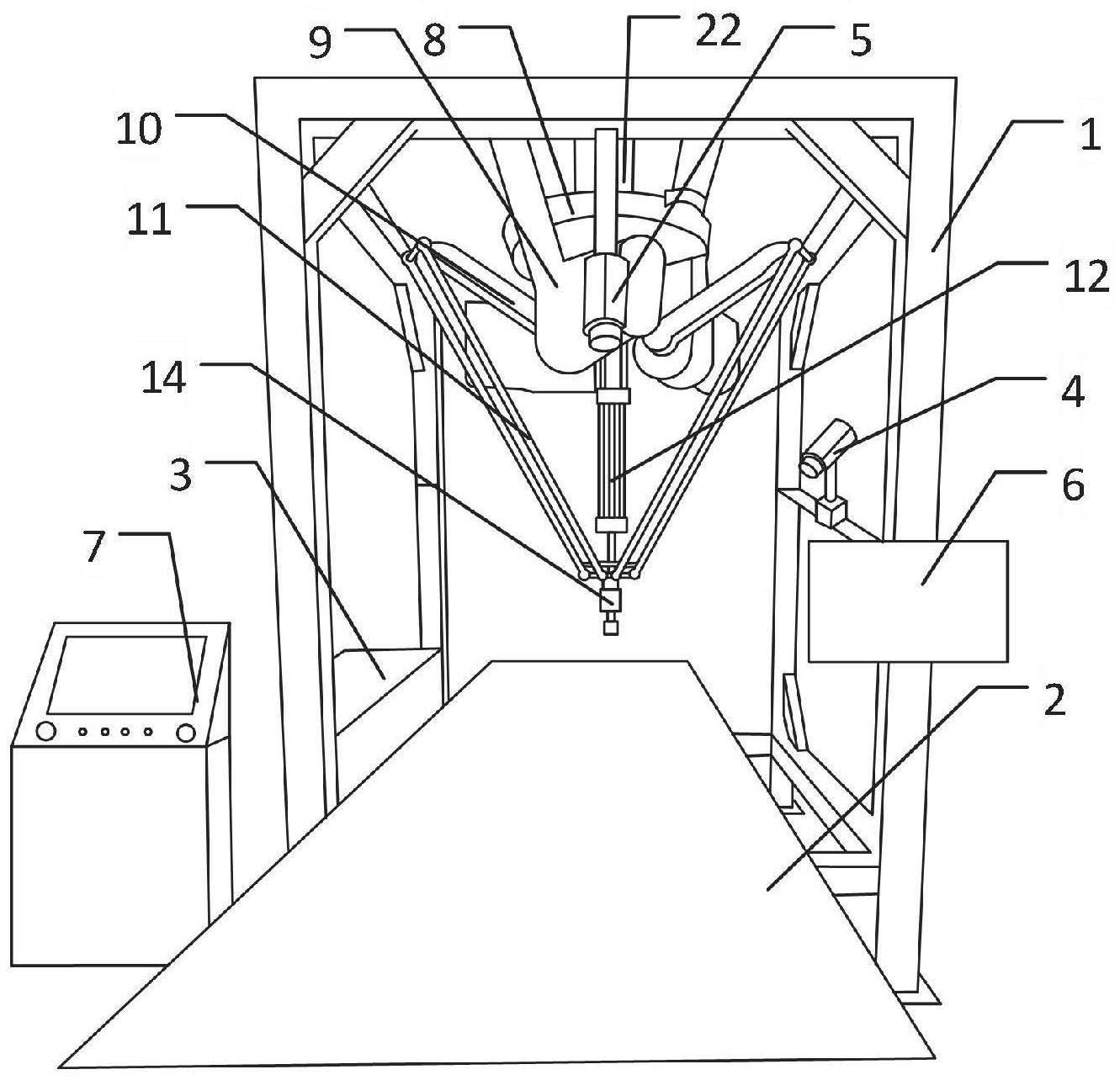
2、为实现上述目的,本发明提供了一种基于视觉识别的自动分拣机械臂,包括蜘蛛手机械臂、支撑架、视觉识别装置、传送带、真空抽取装置和放置台,所述蜘蛛手机械臂设置在所述支撑架的顶部,所述视觉识别装置设置在所述支撑架上,所述传送带设置在所述蜘蛛手机械臂下方,所述真空抽取装置设置在所述蜘蛛手机械臂的上方,所述放置台设置在所述支撑架的一侧;
3、所述视觉识别装置包括设置于所述支撑架顶部的相机一、设置于所述支撑架远离所述放置台的一侧的相机二、设置于所述支撑架前方的显示屏和设置于所述支撑架旁侧的控制器。
4、优选的,所述蜘蛛手机械臂包括抓取板、调节杆、小臂、大臂和底座,所述底座边部设置有转动电机,所述大臂与所述转动电机转动连接,所述小臂与所述大臂转动连接,所述底座中央与所述调节杆一端连接,所述调节杆另一端与所述抓取板连接,所述抓取板的底部设置有抓取吸盘。
5、优选的,所述转动电机、所述大臂和所述小臂均设置有三个,所述转动电机和所述大臂、所述调节杆和所述抓取板之间均通过万向节连接。
6、优选的,所述真空抽取装置包括真空罐、真空泵、抽气软管一和抽气软管二,所述真空罐和所述真空泵设置在所述底座的上方,所述真空罐与所述抓取吸盘之间通过所述抽气软管一连接,所述真空罐与所述真空泵之间通过所述抽气软管二连接。
7、优选的,所述抓取吸盘包括第一抓取罩和第二抓取罩,所述抓取板下方固定安装有第一抓取罩,所述第二抓取罩设置在所述第一抓取罩内部中心位置处,所述第一抓取罩与第二抓取罩之间形成第一真空腔,所述第二抓取罩中部形成第二真空腔,所述第一真空腔顶端安装有第一抽真空管,所述第二抓取罩顶端侧壁安装有第二抽真空管,所述第一抽真空管与第二抽真空管之间连通。
8、因此,本发明采用上述的一种基于视觉识别的自动分拣机械臂,具有以下有益效果:
9、(1)通过将视觉识别系统的图像识别以及对机械手的控制,从而实现机械手准确的抓取产品,并且调节产品的角度,能够精准的将产品放入放置工装,不仅提高了工作效率,还降低了产品的损坏率;
10、(2)另外,与传统的人工抓取、搬运、安装相比,具有定位迅速、重复性好、复用性强、长期稳定、耐疲劳、节约了劳动力、降低了加工成本、使用寿命长的优点。
11、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种基于视觉识别的自动分拣机械臂,其特征在于:包括蜘蛛手机械臂、支撑架、视觉识别装置、传送带、真空抽取装置和放置台,所述蜘蛛手机械臂设置在所述支撑架的顶部,所述视觉识别装置设置在所述支撑架上,所述传送带设置在所述蜘蛛手机械臂下方,所述真空抽取装置设置在所述蜘蛛手机械臂的上方,所述放置台设置在所述支撑架的一侧;
2.根据权利要求1所述的一种基于视觉识别的自动分拣机械臂,其特征在于:所述蜘蛛手机械臂包括抓取板、调节杆、小臂、大臂和底座,所述底座边部设置有转动电机,所述大臂与所述转动电机转动连接,所述小臂与所述大臂转动连接,所述底座中央与所述调节杆一端连接,所述调节杆另一端与所述抓取板连接,所述抓取板的底部设置有抓取吸盘。
3.根据权利要求2所述的一种基于视觉识别的自动分拣机械臂,其特征在于:所述转动电机、所述大臂和所述小臂均设置有三个,所述转动电机和所述大臂、所述调节杆和所述抓取板之间均通过万向节连接。
4.根据权利要求2所述的一种基于视觉识别的自动分拣机械臂,其特征在于:所述真空抽取装置包括真空罐、真空泵、抽气软管一和抽气软管二,所述真空罐和所述真空泵设置在所述底座的上方,所述真空罐与所述抓取吸盘之间通过所述抽气软管一连接,所述真空罐与所述真空泵之间通过所述抽气软管二连接。
5.根据权利要求4所述的一种基于视觉识别的自动分拣机械臂,其特征在于:所述抓取吸盘包括第一抓取罩和第二抓取罩,所述抓取板下方固定安装有第一抓取罩,所述第二抓取罩设置在所述第一抓取罩内部中心位置处,所述第一抓取罩与所述第二抓取罩之间形成第一真空腔,所述第二抓取罩中部形成第二真空腔,所述第一真空腔顶端安装有第一抽真空管,所述第二抓取罩顶端侧壁安装有第二抽真空管,所述第一抽真空管与第二抽真空管之间连通。
技术总结
本发明公开了一种基于视觉识别的自动分拣机械臂,属于机械设备技术领域,蜘蛛手机械臂设置在支撑架的顶部,视觉识别装置设置在支撑架上,传送带设置在蜘蛛手机械臂下方,真空抽取装置设置在蜘蛛手机械臂的上方,放置台设置在支撑架的一侧;视觉识别装置包括设置于支撑架顶部的相机一、设置于支撑架远离放置台的一侧的相机二、设置于支撑架前方的显示屏和设置于支撑架旁侧的控制器。本发明采用上述的一种基于视觉识别的自动分拣机械臂,通过将视觉识别系统的图像识别以及对机械手的控制,从而实现机械手准确的抓取产品,并且调节产品的角度,能够精准的将产品放入放置工装,不仅提高了工作效率,还降低了产品的损坏率。
技术研发人员:刘聪娜,何风,张小飞,田璠
受保护的技术使用者:保定小葱智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!