一种兼容三相电能表和单相电能表的分拣机器人抓手的制作方法
本技术涉及电能表检测领域,具体涉及一种兼容三相电能表和单相电能表的分拣机器人抓手。
背景技术:
1、目前各计量中心四线一库已基本建设完成,建成时间最长已超十年,由于用户数量的激增,目前各计量中心的检定线产能已经无法满足日益增长的电能表计需求,另受限于场地限制,已经无法新建单独的单相电能表及三相电能表检定流水线,故需要建立兼容单相电能表和三相电能表的检定线,需要分拣机器人对外形相差较大的单相电能表与三相电能表进行分拣操作。
技术实现思路
1、实用新型目的:本实用新型的目的在于提供一种既能夹取单向电能表又能夹取三相电能表的兼容三相电能表和单相电能表的分拣机器人抓手。
2、技术方案:本实用新型包括连接在分拣机器人末端的第一安装板,第一安装板底面安装第一气缸,第一气缸两端均安装夹爪,通过第一气缸的伸缩运动调整其两端夹爪之间的距离;所述第一安装板前方安装升降部件,升降部件下方连接切换块,当升降部件进行升降运动时,带动切换块垂直运动;所述切换块下降过程中将第一气缸两端的夹爪卡住时,第一气缸两端夹爪的打开宽度被限制。
3、所述第一气缸两端通过连接杆安装夹爪,当切换块两端将连接杆卡住时,第一气缸两端夹爪的打开宽度被限制。
4、所述第一气缸两端的连杆中至少有一个连杆上安装一对夹爪,提高夹取的稳定性。
5、所述升降部件为竖直设置的第二气缸,通过第二气缸来实现切换块的垂直运动。
6、所述切换块包括横杆,横杆两端向下设置突出部,当切换块向下运动时突出部将夹爪挡住。
7、所述分拣机器人末端安装连接件,连接件末端对那个连接第一安装板。
8、所述第一安装板前方固定安装第二安装板,第二安装板上竖直安装升降部件。
9、有益效果:本实用新型的技术方案与现有技术相比,其有益效果在于:通过合适的设备组合,实现单相电能表与三相电能表的兼容抓取与分拣,减少了分拣机器人的结构数量,减少了场地的占用,提高了分拣机器人分拣的稳定性与效率,从而提升了电能表检定流水线整体的生产效率和设备实用性。
技术特征:
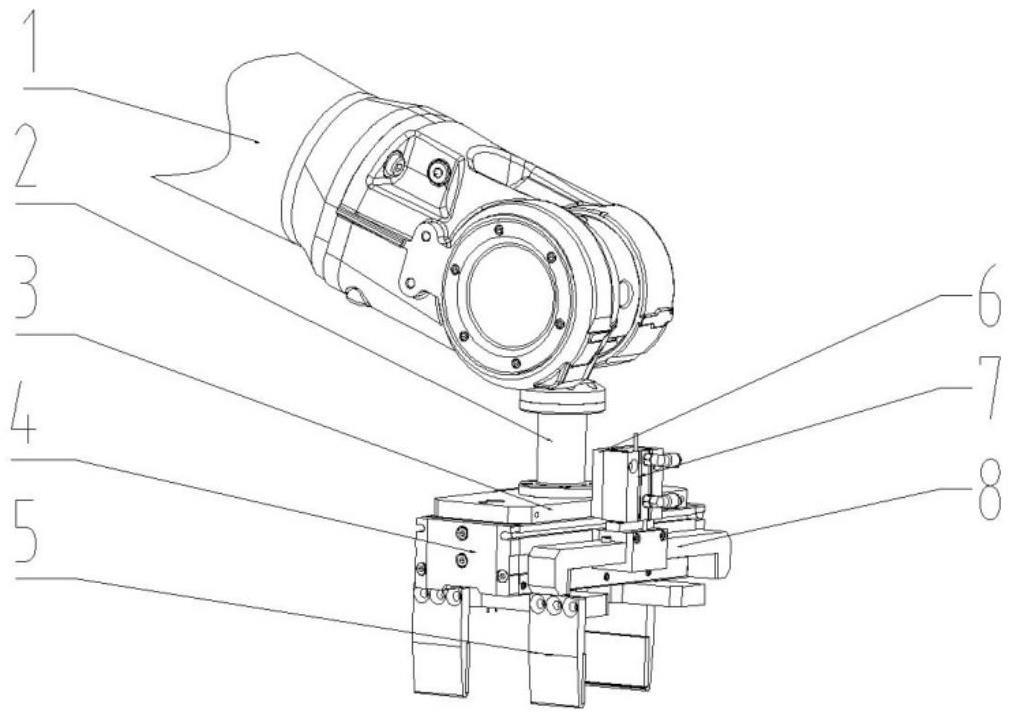
1.一种兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:包括连接在分拣机器人(1)末端的第一安装板(3),第一安装板(3)底面安装第一气缸(4),第一气缸(4)两端安装夹爪(5),通过第一气缸(4)的伸缩运动调整其两端夹爪(5)之间的距离;所述第一安装板(3)前方安装升降部件,升降部件下方连接切换块(8),当升降部件进行升降运动时,带动切换块(8)垂直运动;所述切换块(8)下降过程中将第一气缸(4)两端的夹爪(5)卡住时,第一气缸(4)两端夹爪(5)的打开宽度受限。
2.根据权利要求1所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述第一气缸(4)两端通过连接杆安装夹爪(5),当切换块(8)两端将连接杆卡住时,第一气缸(4)两端夹爪(5)的打开宽度被限制。
3.根据权利要求2所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述第一气缸(4)两端的连杆中至少有一个连杆上安装一对夹爪(5)。
4.根据权利要求1所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述升降部件为竖直设置的第二气缸(7)。
5.根据权利要求1所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述切换块(8)包括横杆,横杆两端向下设置突出部。
6.根据权利要求1所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述分拣机器人(1)末端安装连接件(2),连接件(2)末端对那个连接第一安装板(3)。
7.根据权利要求1至6任一项所述的兼容三相电能表和单相电能表的分拣机器人抓手,其特征在于:所述第一安装板(3)前方固定安装第二安装板(6),第二安装板(6)上竖直安装升降部件。
技术总结
本技术公开了一种兼容三相电能表和单相电能表的分拣机器人抓手,包括连接在分拣机器人末端的第一安装板,第一安装板底面安装第一气缸,第一气缸两端均安装夹爪,通过第一气缸的伸缩运动调整其两端夹爪之间的距离;所述第一安装板前方安装升降部件,升降部件下方连接切换块,当升降部件进行升降运动时,带动切换块垂直运动;所述切换块下降过程中将第一气缸两端的夹爪卡住时,第一气缸两端夹爪的打开宽度受限。本方案实现了单相电能表与三相电能表的兼容抓取与分拣,减少了分拣机器人的结构数量,减少了场地的占用。
技术研发人员:贺唯聪,安泰,贾文轩,郑志锋,王奕涵,张保印,赵森,程大伟,王帅,李根强,汪松泉,王彩云
受保护的技术使用者:北京南瑞捷鸿科技有限公司
技术研发日:20230303
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!