电磁铁吸取装置的制作方法
本技术涉及输送设备,更具体涉及一种电磁铁吸取装置。
背景技术:
1、生产制造业正由传统的人工密集型向智能制造转变。智能制造利用互联网技术、自动控制技术、机械手、智能机器人技术实现无人化高精度、高效率的生产装配。工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、在智能制造过程中需要利用输送带传输,对于一些设备需要清除掉输送带上的金属碎屑以及小的废料,因此需要输送带的上方设置吸取设备清理掉金属碎屑以及小的废料,因此需要一种吸取金属碎屑和废料的装置。
技术实现思路
1、为了解决上述问题,本实用新型的目的在于提供了一种吸取效率高、便于清理、结构可靠以及安装便利的电磁铁吸取装置。
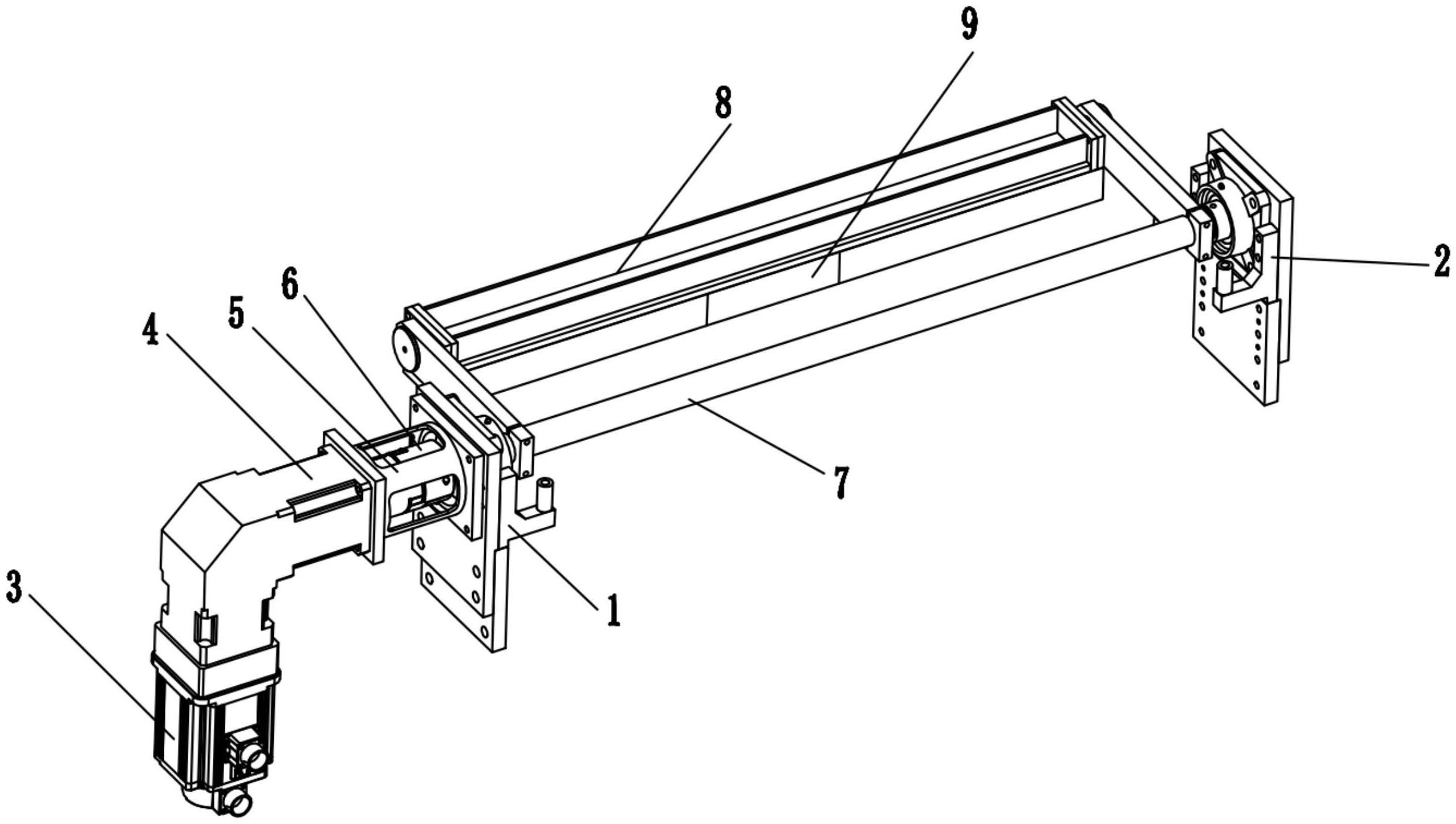
2、根据本实用新型的一个方面,提供了电磁铁吸取装置,包括:第一安装部、第二安装部、电机、减速机、机座、联轴器、转轴、安装支架组件和电磁板,机座固定连接第一安装部,减速机固定设置在机架上,电机的输出端连接减速机,减速机的输出端通过联轴器连接转轴的一端,转轴设置穿过第一安装部,转轴的另一端设置在第二安装部上,电机驱动转轴转动,转轴上固定设置安装支架组件,电磁板设置在安装支架组件上。
3、在一些实施方式中,第一安装部包括:第一安装板、第一连接板、第一限位座和第一轴承座,第一安装板的顶部固定连接第一连接板,第一连接板上设有安装孔,安装孔的内侧设有第一轴承座,转轴穿过安装孔与第一轴承座连接,安装孔的外侧设有机架,第一限位座设有两个对称安装在第一连接板上且位于第一轴承座的两侧,第一限位座设有第一缓冲块。
4、在一些实施方式中,第二安装部包括:第二安装板、第二连接板、第二限位座和第二轴承座,第二安装板的顶部固定连接第二连接板,第二连接板的内侧设有第二轴承座,转轴的一端连接第二轴承座连接,第二限位座设有两个对称安装在第二连接板上且位于第二轴承座的两侧,第二限位座设有第二缓冲块。
5、在一些实施方式中,安装支架组件包括固定支架、摆臂和抱紧块,摆臂的底部通过抱紧块将转轴与摆臂固定连接,摆臂的顶部固定连接固定支架,电磁板安装在固定支架上。
6、在一些实施方式中,摆臂和抱紧块至少设有两组。
7、在一些实施方式中,电机为伺服电机。
8、本实用新型与现有技术相比具有吸取效率高、便于清理、结构可靠以及安装便利的有益效果;通过电机驱动时电磁板位于输送带上方,便于吸取金属碎屑和小块废料,在完成吸取以后电机驱动电磁板翻转,便于完成废料的清理;利用第一安装部和第二安装部便于安装到输送设备上。
技术特征:
1.电磁铁吸取装置,其特征在于,包括:第一安装部、第二安装部、电机、减速机、机座、联轴器、转轴、安装支架组件和电磁板,所述机座固定连接第一安装部,所述减速机固定设置在机架上,所述电机的输出端连接减速机,所述减速机的输出端通过联轴器连接转轴的一端,所述转轴设置穿过第一安装部,所述转轴的另一端设置在第二安装部上,所述电机驱动转轴转动,所述转轴上固定设置安装支架组件,所述电磁板设置在安装支架组件上。
2.根据权利要求1所述的电磁铁吸取装置,其特征在于,所述第一安装部包括:第一安装板、第一连接板、第一限位座和第一轴承座,所述第一安装板的顶部固定连接第一连接板,所述第一连接板上设有安装孔,所述安装孔的内侧设有第一轴承座,所述转轴穿过安装孔与第一轴承座连接,所述安装孔的外侧设有机架,所述第一限位座设有两个对称安装在第一连接板上且位于第一轴承座的两侧,所述第一限位座设有第一缓冲块。
3.根据权利要求2所述的电磁铁吸取装置,其特征在于,所述第二安装部包括:第二安装板、第二连接板、第二限位座和第二轴承座,所述第二安装板的顶部固定连接第二连接板,所述第二连接板的内侧设有第二轴承座,所述转轴的一端连接第二轴承座连接,所述第二限位座设有两个对称安装在第二连接板上且位于第二轴承座的两侧,所述第二限位座设有第二缓冲块。
4.根据权利要求1所述的电磁铁吸取装置,其特征在于,所述安装支架组件包括固定支架、摆臂和抱紧块,所述摆臂的底部通过抱紧块将转轴与摆臂固定连接,所述摆臂的顶部固定连接固定支架,所述电磁板安装在固定支架上。
5.根据权利要求4所述的电磁铁吸取装置,其特征在于,所述摆臂和抱紧块至少设有两组。
6.根据权利要求1-5任一项所述的电磁铁吸取装置,其特征在于,所述电机为伺服电机。
技术总结
本技术公开了一种电磁铁吸取装置,包括:第一安装部、第二安装部、电机、减速机、机座、联轴器、转轴、安装支架组件和电磁板,机座固定连接第一安装部,减速机固定设置在机架上,电机的输出端连接减速机,减速机的输出端通过联轴器连接转轴的一端,转轴设置穿过第一安装部,转轴的另一端设置在第二安装部上,电机驱动转轴转动,转轴上固定设置安装支架组件,电磁板设置在安装支架组件上,本技术提供了一种吸取效率高、便于清理、结构可靠以及安装便利的电磁铁吸取装置。
技术研发人员:吕航,吕跃罡,王月阳,罗如祥
受保护的技术使用者:南京黎创智能装备有限公司
技术研发日:20230320
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!