一种机器视觉自动化检测机器人的制作方法
本技术涉及食品外包装检测,具体涉及一种机器视觉自动化检测机器人。
背景技术:
1、本实用新型对于背景技术的描述属于与本实用新型相关的相关技术,仅仅是用于说明和便于理解本实用新型的
技术实现要素:
,不应理解为申请人明确认为或推定申请人认为是本实用新型在首次提出申请的申请日的现有技术。
2、当下,人们生活水平质量不断提高,饮料和奶制品等液态食品已经非常普及。
3、饮料在灌装完成后的包装工序,包括封膜和扣盖。而封膜和扣盖如果出现不合格,会给品牌带来不利影响。如若用人工检测是否达标,效率和准确率都不是很高。如何提高检测封膜和扣盖效率和准确率,是本领域技术人员有待解决的问题。
技术实现思路
1、本实用新型实施例的目的是提供一种机器视觉自动化检测机器人,本实用新型的检测机器人能在产线高速运转不停线的情况下,对封膜和扣盖进行快速检测,准确判断封膜和扣盖是否符合质量标准,并能控制剔除机构将不合格品进行剔除,自动化程度高。
2、本实用新型实施例的目的是通过如下技术方案实现的:
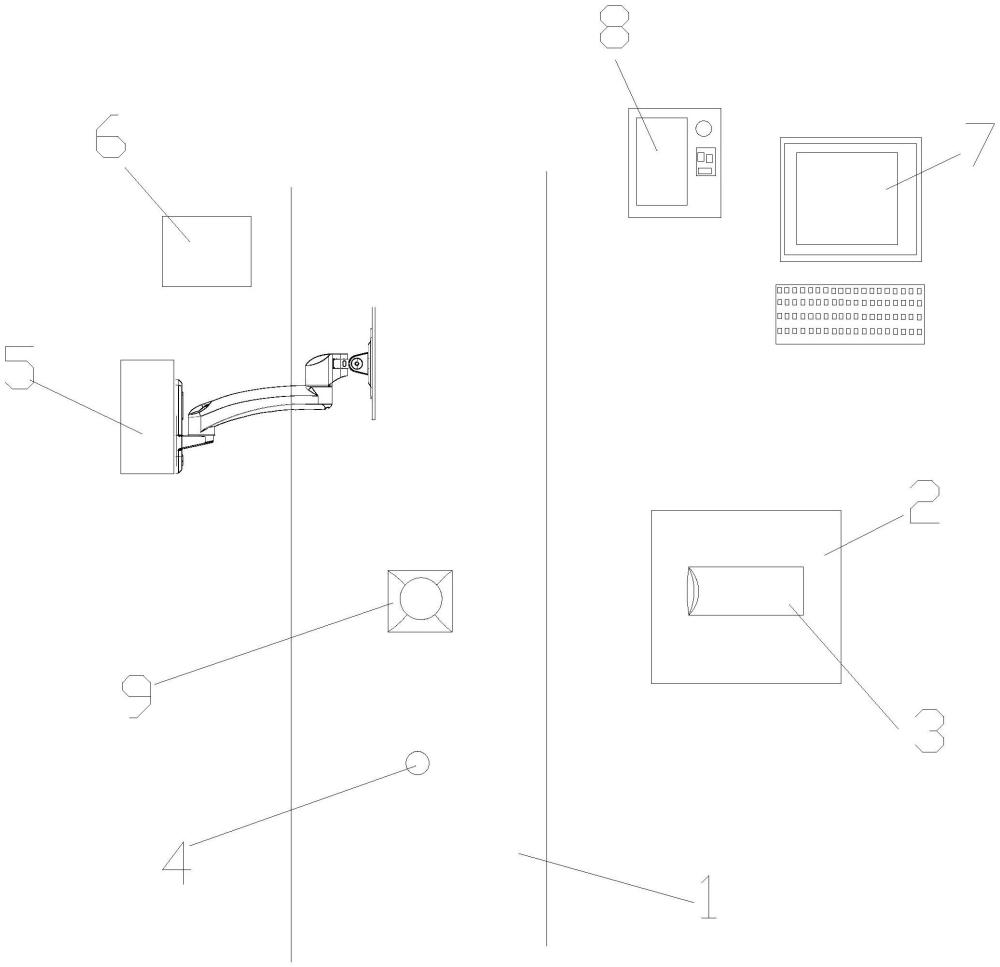
3、一种机器视觉自动化检测机器人,包括:
4、传送装置,用于传送封膜和扣盖的饮料瓶;
5、检测台,所述的检测台上设有相机;所述的检测台位于所述的传送装置一侧,用于获取所述的饮料瓶的封膜和扣盖的图像;
6、称重传感器,所述的称重传感器设置在所述的传送装置上,所述的称重传感器在传送装置的传送方向上位于所述的检测台的前方;
7、机械手,设置在所述的传送装置的上方,所述的机械手在传送装置的传送方向上位于所述的检测台的后方;
8、计算机,所述的相机和称重传感器分别与所述的计算机信号连接;
9、控制器,所述的控制器分别与所述的机械手和计算机信号连接。
10、进一步的,还包括补偿光源,所述的补偿光源位于所述的检测台上,所述的补偿光源与所述的计算机信号连接。
11、进一步的,还包括背景光源,所述的背景光源固定在与所述的相机关于传送装置对面位置。
12、进一步的,所述的检测台上设有升降装置,所述的相机固定在升降装置上。
13、进一步的,所述的传送装置包括传送带,所述的传送带表面设有防滑层。
14、进一步的,还包括收集箱,所述的收集箱用于收集所述的机械手剔除的不合格饮料瓶。
15、本实用新型实施例具有如下有益效果:
16、本实用新型通过相机对瓶子的封膜和扣盖拍照并粘贴检测是否合规,结构简单,设计合理,操作精准度高,工作效率高,节约成本,安全可靠。能在产线高速运转不停线的情况下,对封膜和扣盖进行快速检测,准确判断封膜和扣盖是否符合质量标准,并能控制剔除机构将不合格品进行剔除,自动化程度高。
技术特征:
1.一种机器视觉自动化检测机器人,其特征在于,包括:
2.根据权利要求1所述的机器视觉自动化检测机器人,其特征在于,还包括补偿光源,所述的补偿光源位于所述的检测台上,所述的补偿光源与所述的计算机信号连接。
3.根据权利要求1所述的机器视觉自动化检测机器人,其特征在于,还包括背景光源,所述的背景光源固定在与所述的相机关于传送装置对面位置。
4.根据权利要求1所述的机器视觉自动化检测机器人,其特征在于,所述的检测台上设有升降装置,所述的相机固定在升降装置上。
5.根据权利要求1所述的机器视觉自动化检测机器人,其特征在于,所述的传送装置包括传送带,所述的传送带表面设有防滑层。
6.根据权利要求1所述的机器视觉自动化检测机器人,其特征在于,还包括收集箱,所述的收集箱用于收集所述的机械手剔除的不合格饮料瓶。
技术总结
本技术属于食品外包装检测技术领域,公开了一种机器视觉自动化检测机器人。传送装置,用于传送封膜和扣盖的饮料瓶;检测台,检测台上设有相机;检测台位于传送装置一侧,用于获取封膜和扣盖的图像;称重传感器,称重传感器设置在传送装置上,称重传感器在传送装置的传送方向上位于检测台的前方;机械手,为吸盘式机械手,机械手位于检测台的后方;计算机,相机和称重传感器分别与计算机信号连接;控制器,控制器分别与机械手和计算机信号连接。本技术的检测机器人能在产线高速运转不停线的情况下,对封膜和扣盖进行快速检测,准确判断封膜和扣盖是否符合质量标准,并能控制剔除机构将不合格品进行剔除,自动化程度高。
技术研发人员:原钰楠,陈彩虹,冯其昌
受保护的技术使用者:兰芳园食品有限公司
技术研发日:20230329
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!