一种基于视觉检测装置的机器人循环分拣展示平台的制作方法
本申请涉及循环回流线展示平台,尤其涉及一种基于视觉检测装置的机器人循环分拣展示平台。
背景技术:
1、为了更加直观地体现自动化流水线的生产模式,一般会使用循环回流线展示平台对自动化生产线进行大致模拟,该循环回流线展示平台即可以理解为一种简易的自动化生产线的模型,入料端无需自行供料,生产线末端的产品会回流到入料端从而充当进料,以循环演示自动化流水线的内容。
2、现有技术中,循环回流线展示平台大多都是将固定的生产样品按照固定的顺序循环演示,即入料端处的进料的状态通常固定不便,使得循环回流线展示平台难以展示实际生产中的不确定性。
技术实现思路
1、为了解决上述技术问题,本申请提供了一种基于视觉检测装置的机器人循环分拣展示平台,能够提高展示平台对实际生产中不确定性的展示能力,具体参考下述例子。
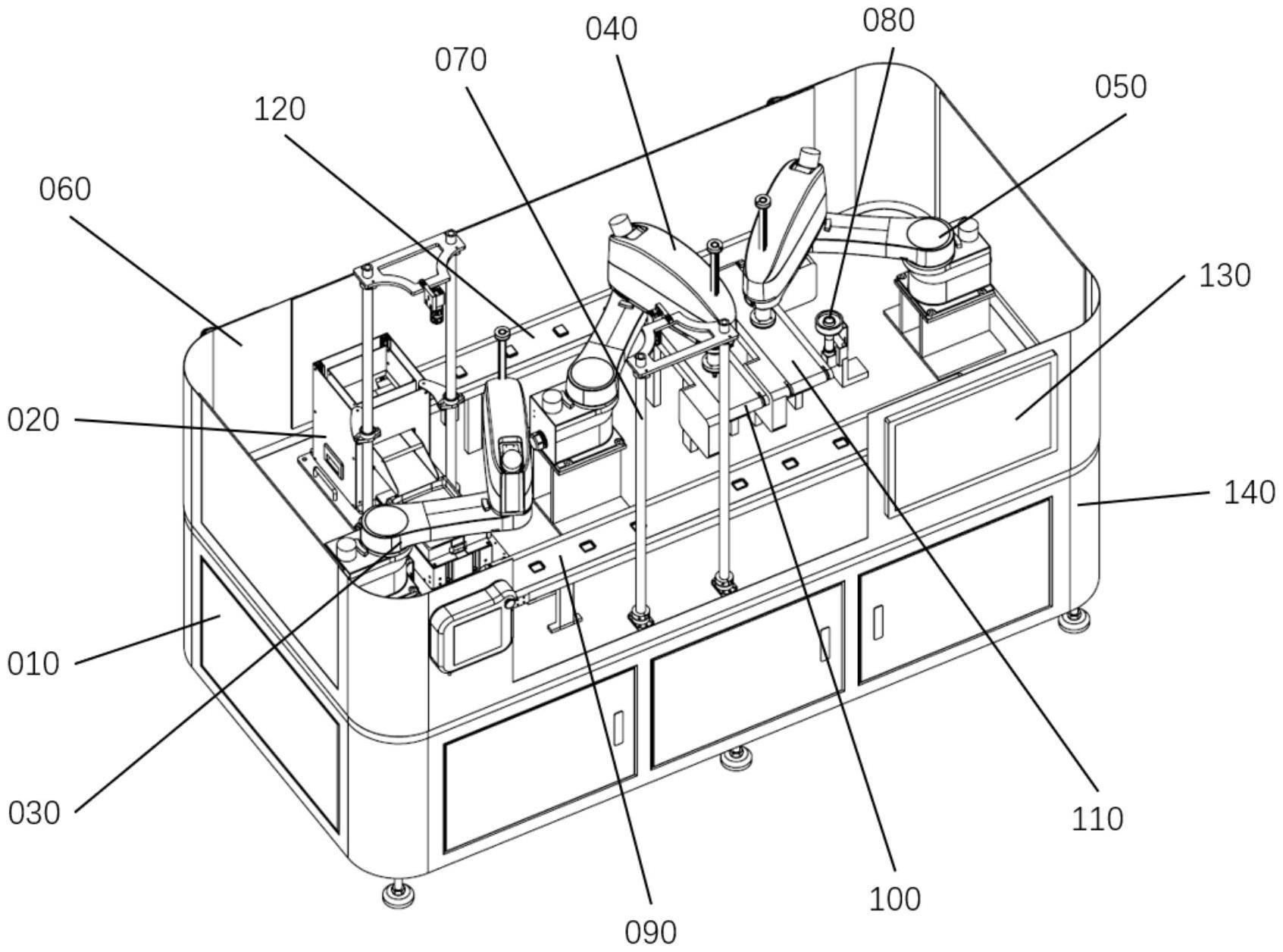
2、本申请提供了一种基于视觉检测装置的机器人循环分拣展示平台,包括:展台下机架、柔性供料器、第一机器人、第二机器人、第三机器人、第一视觉检测装置、第二视觉检测装置、第三视觉检测装置、上料输送线、第一中转输送线、第二中转输送线和回流输送线;所述柔性供料器包括料仓和供料盘;
3、所述柔性供料器、所述第一机器人、所述第二机器人、所述第三机器人、所述第一视觉检测装置、所述第二视觉检测装置、所述第三视觉检测装置、所述上料输送线、所述第一中转输送线、所述第二中转输送线和所述回流输送线均固定于所述展台下机架上;
4、所述料仓的出料口与所述供料盘连接,所述供料盘上方设置有所述第一视觉检测装置,所述第一视觉检测装置与所述第一机器人电连接,所述第一机器人用于将所述供料盘上被所述第一视觉检测装置识别到的产品吸取并移动至所述上料输送线上;
5、所述第二视觉检测装置位于所述上料输送线上方,并与所述第二机器人电连接,所述第二机器人用于将所述上料输送线上被所述第二视觉检测装置识别不合格的产品吸取并移动至所述第一中转输送线上;
6、所述第三机器人位于所述上料输送线尾端,并与所述第三视觉检测装置电连接,所述第三机器人用于吸取并运输所述上料输送线尾端的产品至所述第三视觉检测装置上方以进行识别,再将识别不合格的产品吸取并移动至所述第二中转输送线上,将识别合格的产品吸取并移动至所述回流输送线上;
7、所述第一中转输送线和所述第二中转输送线的尾端均与所述回流输送线连接,所述回流输送线的尾端与所述料仓的进料口连接。
8、可选地,所述料仓呈桶状,所述料仓的进料口位于所述料仓的上方,所述料仓的出料口呈斜坡状并凸出于所述料仓侧壁,所述供料盘边缘包围有限位壁,所述料仓的出料口朝向所述供料盘的底面上所述限位壁包围的位置。
9、可选地,所述第一中转输送线和所述第二中转输送线均位于所述回流输送线和所述上料输送线之间。
10、可选地,所述第一机器人、所述第二机器人和所述第三机器人的末端均固定连接有吸盘,所述吸盘用于吸附抓取产品。
11、可选地,所述第一机器人、所述第二机器人和所述第三机器人均为四轴机器人。
12、可选地,所述基于视觉检测装置的机器人循环分拣展示平台还包括安全护栏;
13、所述展台下机架边缘包围设置有所述安全护栏。
14、可选地,所述基于视觉检测装置的机器人循环分拣展示平台还包括展示屏;
15、所述展示屏固定于所述展台下机架上,所述展示屏与所述第一视觉检测装置、所述第二视觉检测装置和所述第三视觉检测装置电连接,所述展示屏用于展示所述第一视觉检测装置、所述第二视觉检测装置和所述第三视觉检测装置的识别结果。
16、可选地,所述上料输送线、所述第一中转输送线、所述第二中转输送线和所述回流输送线均与驱动电机传动连接。
17、可选地,所述展台下机架呈长方体状,内部由方通与钣金焊接组合而成,外侧与封板固定连接,所述封板表面设置有烤漆层。
18、可选地,所述上料输送线、所述第一中转输送线、所述第二中转输送线和所述回流输送线均呈直线型。
19、从以上技术方案可以看出,本申请具有以下优点:
20、在本申请中,料仓的出料口与供料盘连接,供料盘上方设有与第一机器人连接的第一视觉检测装置;第一视觉检测装置位于上料输送线上方,并与第二机器人连接;第三机器人位于上料输送线尾端,并与第三视觉检测装置连接;第一中转输送线和第二中转输送线均与回流输送线连接,回流输送线的尾端与料仓的进料口连接。
21、实际应用中,在产品循环回流的路线中,柔性供料器可以将再次回流到料仓的进料口处的产品进行随机性分拣,可以使得循环回流线中回流的产品的位置和摆向等位置状态进行随机化更变,可以尽可能使得循环回流的产品展示平台模拟出实际中进料产品的随机性,从而能够提高展示平台对实际生产中不确定性的展示能力。
技术特征:
1.一种基于视觉检测装置的机器人循环分拣展示平台,其特征在于,包括:展台下机架、柔性供料器、第一机器人、第二机器人、第三机器人、第一视觉检测装置、第二视觉检测装置、第三视觉检测装置、上料输送线、第一中转输送线、第二中转输送线和回流输送线;所述柔性供料器包括料仓和供料盘;
2.根据权利要求1中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述料仓呈桶状,所述料仓的进料口位于所述料仓的上方,所述料仓的出料口呈斜坡状并凸出于所述料仓侧壁,所述供料盘边缘包围有限位壁,所述料仓的出料口朝向所述供料盘的底面上所述限位壁包围的位置。
3.根据权利要求1中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述第一中转输送线和所述第二中转输送线均位于所述回流输送线和所述上料输送线之间。
4.根据权利要求1中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述第一机器人、所述第二机器人和所述第三机器人的末端均固定连接有吸盘,所述吸盘用于吸附抓取产品。
5.根据权利要求4中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述第一机器人、所述第二机器人和所述第三机器人均为四轴机器人。
6.根据权利要求1中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述基于视觉检测装置的机器人循环分拣展示平台还包括安全护栏;
7.根据权利要求1中所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述基于视觉检测装置的机器人循环分拣展示平台还包括展示屏;
8.根据权利要求1至7中任一项所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述上料输送线、所述第一中转输送线、所述第二中转输送线和所述回流输送线均与驱动电机传动连接。
9.根据权利要求1至7中任一项所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述展台下机架呈长方体状,内部由方通与钣金焊接组合而成,外侧与封板固定连接,所述封板表面设置有烤漆层。
10.根据权利要求1至7中任一项所述的基于视觉检测装置的机器人循环分拣展示平台,其特征在于,所述上料输送线、所述第一中转输送线、所述第二中转输送线和所述回流输送线均呈直线型。
技术总结
本申请公开了一种基于视觉检测装置的机器人循环分拣展示平台,能够提高展示平台对实际生产中不确定性的展示能力。本申请中的基于视觉检测装置的机器人循环分拣展示平台包括:展台下机架、柔性供料器、三个机器人、三个检测装置和多个输送线;柔性供料器包括料仓和供料盘;料仓的出料口与供料盘连接,供料盘上方设置有第一视觉检测装置,第一视觉检测装置与第一机器人连接;第一视觉检测装置位于上料输送线上方,并与第二机器人连接;第三机器人位于上料输送线尾端,并与第三视觉检测装置连接;第一中转输送线和第二中转输送线的尾端均与回流输送线连接,回流输送线的尾端与料仓的进料口连接。
技术研发人员:兰海波
受保护的技术使用者:安徽省配天机器人集团有限公司
技术研发日:20230406
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!