一种物流包裹自动化分拣装置的制作方法
本技术涉及自动化分拣装置,尤其涉及一种物流包裹自动化分拣装置。
背景技术:
1、自动分拣机是按照预先设定的计算机指令对物品进行分拣,并将分拣出的物品送达指定位置的机械,随着激光扫描、条码及计算机控制技术的发展,自动分拣机在物流中的使用日益普遍,在邮政部门自动信函分拣机及自动包裹分拣机已经使用多年。
2、现有的物流包裹自动化分拣装置,在使用时,无法自动调整包裹的角度,当包裹条码位于底部时,无法将包裹翻面,从而影响扫描装置对条码的扫描,而且现有的物流包裹自动化分拣装置,无法对前后两端不同高度的条码进行扫描。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种物流包裹自动化分拣装置。
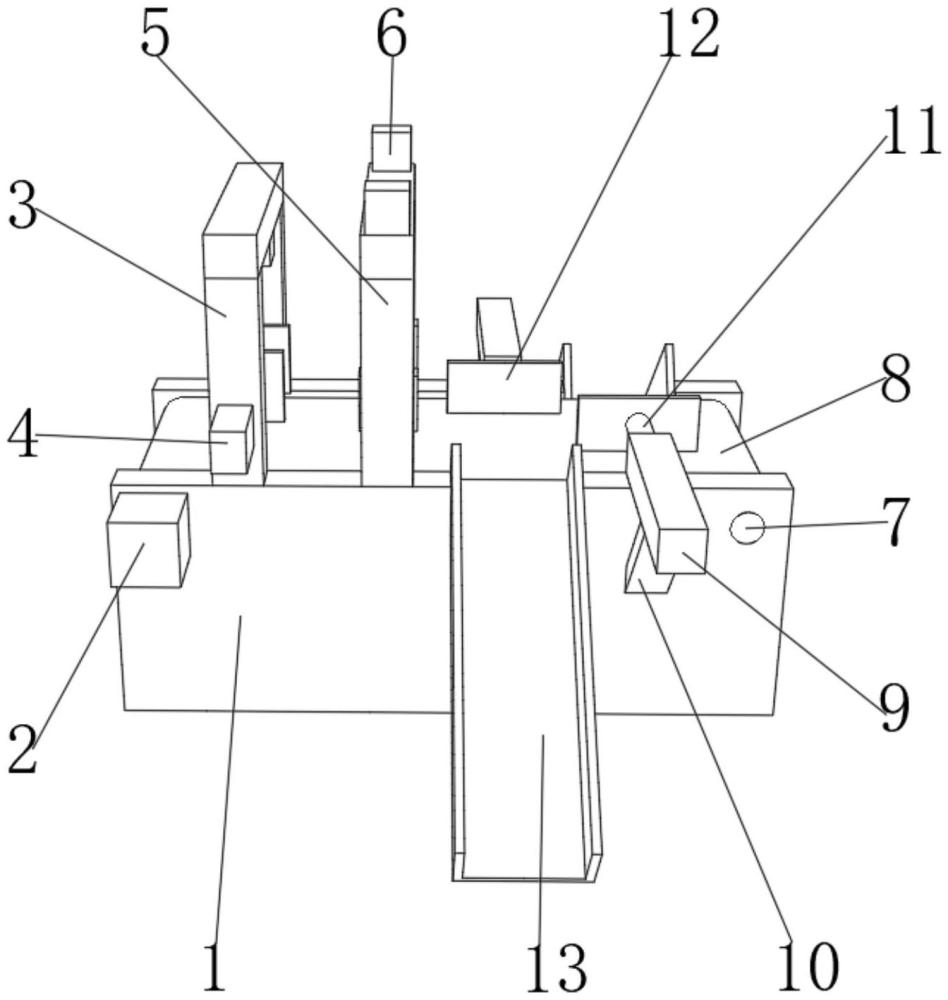
2、为了实现上述目的,本实用新型采用了如下技术方案:一种物流包裹自动化分拣装置,包括支撑板,两个所述支撑板前后两端左右两侧位置均贯穿并转动连接有传送轴,两个所述传送轴外径中间位置均贯穿并固定连接有传送辊,两个所述传送辊外径上均设置有传送带,两个所述支撑板顶部左侧位置均固定连接有支撑架,所述支撑架前后两端底部位置均固定连接有第一气缸,两个所述第一气缸前后两端之间均贯穿并设置有第一推杆,两个所述第一推杆另一端均固定连接有第三电机,两个所述第三电机输出端均固定连接有转轴,两个所述转轴另一端均固定连接有夹板,两个所述支撑板顶部左侧靠近中间位置固定连接有固定架,所述固定架顶部前后两端位置均固定连接有第二电机,两个所述第二电机输出端均固定连接有丝杆,两个所述丝杆外径底部位置均固定连接有螺母副,两个所述螺母副前后两端之间均固定连接有固定块,两个所述支撑板顶部右侧位置均固定连接有第二气缸,两个所述第二气缸前后两端之间均贯穿并设置有第二推杆,两个所述第二推杆另一端均固定连接有推板。
3、作为上述技术方案的进一步描述:
4、前端所述支撑板前端左侧位置固定连接有第一电机且第一电机输出端与传送轴固定连接。
5、作为上述技术方案的进一步描述:
6、两个所述第一推杆与支撑架之间贯穿并滑动连接。
7、作为上述技术方案的进一步描述:
8、所述支撑架底部位置固定连接有第一扫描装置。
9、作为上述技术方案的进一步描述:
10、两个所述丝杆与固定架之间贯穿并转动连接。
11、作为上述技术方案的进一步描述:
12、两个所述固定块另一端均固定连接有第二扫描装置。
13、作为上述技术方案的进一步描述:
14、两个所述支撑板前后两端右侧位置均固定连接有滑板。
15、作为上述技术方案的进一步描述:
16、两个所述第二气缸底部位置均固定连接有固定板且固定板与支撑板固定连接。
17、本实用新型具有如下有益效果:
18、本实用新型中,当包裹条码不在顶部时,通过第一气缸带动第一推杆和夹板相对移动将包裹夹紧,通过第三电机带动包裹转动,从而使条码对准第一扫描装置,当条码位于前后两端时,通过第二电机带动丝杆转动,使螺母副和第二扫描装置上下移动,通过第二扫描装置对包裹前后两端不同高度的条码进行扫描。
技术特征:
1.一种物流包裹自动化分拣装置,包括支撑板(1),其特征在于:两个所述支撑板(1)前后两端左右两侧位置均贯穿并转动连接有传送轴(7),两个所述传送轴(7)外径中间位置均贯穿并固定连接有传送辊(14),两个所述传送辊(14)外径上均设置有传送带(8),两个所述支撑板(1)顶部左侧位置均固定连接有支撑架(3),所述支撑架(3)前后两端底部位置均固定连接有第一气缸(4),两个所述第一气缸(4)前后两端之间均贯穿并设置有第一推杆(15),两个所述第一推杆(15)另一端均固定连接有第三电机(16),两个所述第三电机(16)输出端均固定连接有转轴(17),两个所述转轴(17)另一端均固定连接有夹板(18),两个所述支撑板(1)顶部左侧靠近中间位置固定连接有固定架(5),所述固定架(5)顶部前后两端位置均固定连接有第二电机(6),两个所述第二电机(6)输出端均固定连接有丝杆(19),两个所述丝杆(19)外径底部位置均固定连接有螺母副(20),两个所述螺母副(20)前后两端之间均固定连接有固定块(21),两个所述支撑板(1)顶部右侧位置均固定连接有第二气缸(9),两个所述第二气缸(9)前后两端之间均贯穿并设置有第二推杆(11),两个所述第二推杆(11)另一端均固定连接有推板(12)。
2.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:前端所述支撑板(1)前端左侧位置固定连接有第一电机(2)且第一电机(2)输出端与传送轴(7)固定连接。
3.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:两个所述第一推杆(15)与支撑架(3)之间贯穿并滑动连接。
4.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:所述支撑架(3)底部位置固定连接有第一扫描装置(23)。
5.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:两个所述丝杆(19)与固定架(5)之间贯穿并转动连接。
6.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:两个所述固定块(21)另一端均固定连接有第二扫描装置(22)。
7.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:两个所述支撑板(1)前后两端右侧位置均固定连接有滑板(13)。
8.根据权利要求1所述的一种物流包裹自动化分拣装置,其特征在于:两个所述第二气缸(9)底部位置均固定连接有固定板(10)且固定板(10)与支撑板(1)固定连接。
技术总结
本技术公开了一种物流包裹自动化分拣装置,包括支撑板,两个所述第一推杆另一端均固定连接有第三电机,两个所述转轴另一端均固定连接有夹板,所述固定架顶部前后两端位置均固定连接有第二电机,两个所述第二电机输出端均固定连接有丝杆,两个所述丝杆外径底部位置均固定连接有螺母副。本技术中,当包裹条码不在顶部时,通过第一气缸带动第一推杆和夹板相对移动将包裹夹紧,通过第三电机带动包裹转动,从而使条码对准第一扫描装置,当条码位于前后两端时,通过第二电机带动丝杆转动,使螺母副和第二扫描装置上下移动,通过第二扫描装置对包裹前后两端不同高度的条码进行扫描。
技术研发人员:尤永志
受保护的技术使用者:福建奥达智能科技有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!