拣选工作站及拣选系统的制作方法
本申请涉及分拣,尤其涉及一种拣选工作站及拣选系统。
背景技术:
1、近年来机器人技术的蓬勃发展为整个物流行业带来了巨大的技术变革,也给分拣行业带来新的技术和新的设计理念。
2、相关技术中,机器人拣选系统,采用“货到人”的形式,操作员在拣选工位等待机器人搬运料箱等到达工作站并进行货物拣选。
3、然而,现有的拣选工作站,对拣选人员保护力度不够,存在拣选安全性低的技术问题。
技术实现思路
1、鉴于上述问题,本申请实施例提供一种拣选工作站及拣选系统,提高了对拣选人员的保护力度,从而提高拣选安全性。
2、为了实现上述目的,本申请实施例提供如下技术方案:
3、本申请实施例第一方向提供一种拣选工作站,包括:工作台,所述工作台具有水平设置的拣选桌面,所述拣选桌面上具有贯穿所述拣选桌面的拣选口;
4、位置检测组件,位于所述拣选桌面的下方;所述位置检测组件包括在第一方向上依次间隔排布的第一位置传感器、第二位置传感器和第三位置传感器,且所述第一位置传感器和所述第二位置传感器在所述拣选桌面上的投影位于所述拣选口在所述拣选桌面上的投影范围内,所述第三位置传感器在所述拣选桌面上的投影不在所述拣选口在所述拣选桌面上的投影范围内;
5、其中,所述第二位置传感器和所述第三位置传感器之间的间距小于相邻两个用于向所述拣选口输送料箱的机器人之间的跟车距离。
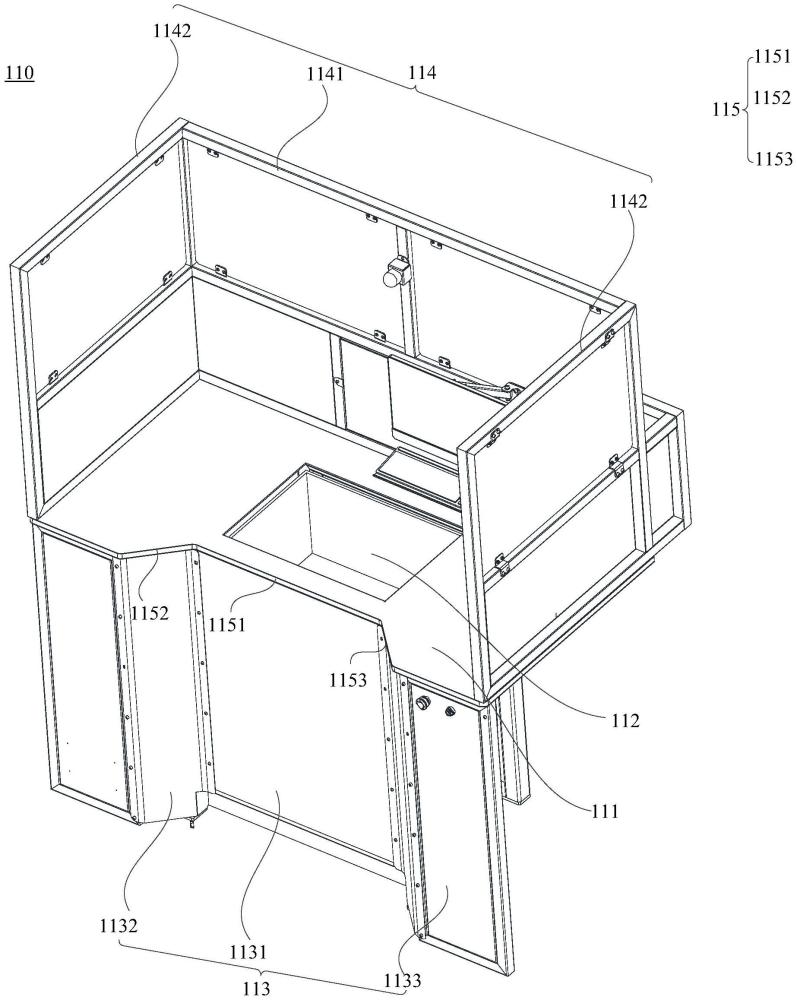
6、在一些实施方式中,所述工作台包括隔板组件,所述隔板组件位于所述拣选桌面的底部;
7、所述隔板组件包括第一隔板,所述第一隔板与所述拣选桌面靠近拣选人员一侧的边缘连接,所述第一隔板被配置为支撑所述拣选桌面,且所述第一位置传感器、所述第二位置传感器和所述第三位置传感器设置在所述第一隔板面向料箱一侧的侧壁上。
8、在一些实施方式中,所述隔板组件还包括第二隔板和第三隔板,第二隔板和第三隔板分别位于所述第一隔板的两侧并与所述拣选桌面的边缘连接,第二隔板和第三隔板被配置与所述第一隔板共同支撑所述拣选桌面。
9、在一些实施方式中,所述拣选桌面靠近拣选人员的一侧设置有拣选凹口;
10、所述拣选凹口包括依次连接的第一连接段、第二连接段和第三连接段,所述第一连接段沿第一方向延伸,所述第二连接段和第三连接段分别位于所述第一连接段的两侧,所述第二连接段和所述第三连接段与所述第一连接段之间具有倾斜夹角,且所述第二连接段和所述第三连接段分别朝向远离所述第一连接段一侧倾斜;
11、其中,所述第一隔板与所述第一连接段连接,所述第二隔板的部分与所述第二连接段连接,所述第三隔板的部分与所述第三连接段连接。
12、在一些实施方式中,还包括光幕组件,所述光幕组件包括发射器和接收器,沿第二方向,所述发射器设置于所述拣选口的一侧,所述接收器设置在所述拣选口的另一侧,所述发射器被配置为朝向所述接收器发射可被所述接收器接收的光线;其中,所述第二方向与所述第一方向在水平面内相互垂直。
13、在一些实施方式中,当所述第一位置传感器和所述第二位置传感器检测到机器人,且所述第三位置传感器未检测到机器人时,则判断机器人到达拣选口的拣选位置,所述发射器关闭。
14、在一些实施方式中,还包括挡板组件,所述挡板组件包括第一挡板,所述第一挡板设置在所述拣选桌面上,且与所述拣选桌面远离拣选人员一侧的边缘连接。
15、在一些实施方式中,所述挡板组件还包括两个第二挡板,两个第二挡板分别位于第一挡板的两侧并与所述第一挡板连接,且两个所述第二挡板分别与其对应的所述拣选桌面的边缘连接。
16、在一些实施方式中,所述拣选口距离拣选口下方的料箱的距离为50mm~55mm。
17、在一些实施方式中,所述第一位置传感器、第二位置传感器和第三位置传感器均为光电传感器。
18、本申请实施例第二方面提供一种拣选系统,包括如上述实施例提供的拣选工作站。
19、本申请实施例提供的拣选工作站包括工作台和位置检测组件,工作台具有水平设置的拣选桌面,拣选桌面上具有贯穿拣选桌面的拣选口,这样,当机器人将料箱搬运至拣选口的下方时,拣选人员可通过拣选口对料箱内的货物进行拣选,由于工作台采用的是桌面的形式,因此,拣选人员难以跨过拣选桌面而进入机器人区,从而能够减小拣选时的安全问题;另外,拣选桌面的下方设置有位置检测组件,位置检测组件包括沿第一方向依次间隔设置的第一位置传感器、第二位置传感器和第三位置传感器,第一方向为机器人向拣选口搬运料箱的方向,第一位置传感器和第二位置传感器在拣选桌面上的投影位于拣选口在拣选桌面上的投影范围内,第三位置传感器在拣选桌面上的投影不在拣选口在拣选桌面上的投影范围内;且第二位置传感器和第三位置传感器之间的间距小于相邻两个用于向拣选口输送料箱的机器人之间的跟车距离,这样,当第一位置传感器和第二位置传感器同时检测到机器人,而第三位置传感器未检测到机器人时,则确定机器人到达拣选位置,此时拣选人员可以通过拣选口对料箱内的货物进行拣选,从而提高了机器人到达拣选位置的检测准确度,进而提高了拣选人员拣选时的安全可靠性。
20、除了上面所描述的本申请实施例解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本申请实施例提供的拣选工作站及拣选系统所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
技术特征:
1.一种拣选工作站,其特征在于,包括:
2.根据权利要求1所述的拣选工作站,其特征在于,所述工作台包括隔板组件,所述隔板组件位于所述拣选桌面的底部;
3.根据权利要求2所述的拣选工作站,其特征在于,所述隔板组件还包括第二隔板和第三隔板,第二隔板和第三隔板分别位于所述第一隔板的两侧并与所述拣选桌面的边缘连接,第二隔板和第三隔板被配置与所述第一隔板共同支撑所述拣选桌面。
4.根据权利要求3所述的拣选工作站,其特征在于,所述拣选桌面靠近拣选人员的一侧设置有拣选凹口;
5.根据权利要求1-4中任一项所述的拣选工作站,其特征在于,还包括光幕组件,所述光幕组件包括发射器和接收器,沿第二方向,所述发射器设置于所述拣选口的一侧,所述接收器设置在所述拣选口的另一侧,所述发射器被配置为朝向所述接收器发射可被所述接收器接收的光线;其中,所述第二方向与所述第一方向在水平面内相互垂直。
6.根据权利要求5所述的拣选工作站,其特征在于,当所述第一位置传感器和所述第二位置传感器检测到机器人,且所述第三位置传感器未检测到机器人时,则判断机器人到达拣选口的拣选位置,所述发射器关闭。
7.根据权利要求1-4中任一项所述的拣选工作站,其特征在于,还包括挡板组件,所述挡板组件包括第一挡板,所述第一挡板设置在所述拣选桌面上,且与所述拣选桌面远离拣选人员一侧的边缘连接。
8.根据权利要求7所述的拣选工作站,其特征在于,所述挡板组件还包括两个第二挡板,两个第二挡板分别位于第一挡板的两侧并与所述第一挡板连接,且两个所述第二挡板分别与其对应的所述拣选桌面的边缘连接。
9.根据权利要求1-4中任一项所述的拣选工作站,其特征在于,所述拣选口距离拣选口下方的料箱的距离为50mm~55mm;
10.一种拣选系统,其特征在于,包括如权利要求1-9中任一项所述的拣选工作站。
技术总结
本申请提供一种拣选工作站及拣选系统,涉及分拣技术领域,用于解决拣选安全性低的技术问题,该拣选工作站包括工作台,工作台具有水平设置的拣选桌面,拣选桌面上具有贯穿拣选桌面的拣选口;位置检测组件,位于拣选桌面的下方;位置检测组件包括在第一方向上依次间隔排布的第一位置传感器、第二位置传感器和第三位置传感器,且第一位置传感器和第二位置传感器在拣选桌面上的投影位于拣选口在拣选桌面上的投影范围内,第三位置传感器在拣选桌面上的投影不在拣选口在拣选桌面上的投影范围内,第二位置传感器和第三位置传感器之间的间距小于相邻两个用于向拣选口输送料箱的机器人之间的跟车距离。本申请提高了拣选安全性。
技术研发人员:陈凯,李小龙,叶一桦,曾鹏程,洪伟,徐思江
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:20230815
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!