组合传感器、电子设备及封装方法与流程
1.本发明涉及传感器技术领域,更为具体地,涉及一种组合传感器、电子设备及封装方法。
背景技术:
2.目前,流速与压力作为流场感知的两个重要指标,在航行器等设备的研究设计中起到十分重要的作用。研究表明,部分深海鱼类通过侧线来感知自身所处流场环境,其中侧线器官分为用于感知流速的体表侧线以及用于感知压力变化的管道侧线。鱼类可以通过体表侧线感知自身周围的流速变化从而得知自身运动速度,通过管道侧线感知水中涡街的变化从而得知周围障碍物的分布情况。
3.基于鱼类侧线的启示,现有的水下设备会分别采集水的流速及压力信息,进而实现对流场信息的感知,但是,现有的流速及压力采集,通常是基于具有相应功能的传感器及电子器件来实现,该方式不仅会导致设备的整体尺寸较大,同时由于分别采集,不能确保采集位置的一致性,影响流场感知的准确性,不利于航行器的研究设计。
技术实现要素:
4.鉴于上述问题,本发明的目的是提供一种组合传感器、电子设备及封装方法,以解决现有流速和压力检测需要依赖两种传感器器件,且不能确保采集数据的一致性问题。
5.本发明提供的组合传感器,包括基板、与基板形成封装结构的壳体,还包括设置在基板上的流速传感器和压力传感器;其中,在壳体上设置有至少两个相互导通的流道孔;压力传感器通过流道孔感知组合传感器所处流场环境中的液体或气体压力,流速传感器通过流道孔形成的流道感知流场环境中的液体流速。
6.此外,可选的技术方案是,流速传感器包括设置在基板上的流速ic芯片和贴设在流速ic芯片上的流速mems芯片;并且,压力传感器包括设置在基板上的压力ic芯片和贴设在压力ic芯片上的压力mems芯片。
7.此外,可选的技术方案是,流道孔包括设置在壳体的上端面的第一流道孔和设置在壳体的侧面的第二流道孔;并且,第一流道孔和第二流道孔的孔径不同。
8.此外,可选的技术方案是,第一流道孔的孔径大于第二流道孔的孔径。
9.此外,可选的技术方案是,流道为第一流道孔和第二流道孔形成的导通通道;流速mems芯片位于导通通道内。
10.此外,可选的技术方案是,压力mems芯片位于壳体内远离流道的封闭端。
11.此外,可选的技术方案是,在壳体内填充防水胶;并且,防水胶覆盖流速传感器和压力传感器设置。
12.此外,可选的技术方案是,流速ic芯片和压力ic芯片分别通过电连接线与基板导通;流速mems芯片通过电连接线与流速ic芯片导通,压力mems芯片通过电连接线与压力ic芯片导通。
13.根据本发明的另一方面,提供一种电子设备,包括上述的组合传感器及控制芯片;其中,控制芯片用于根据组合传感器检测的液体流速及压力信息,确定电子设备的姿态信息及预设范围内的障碍物,并基于姿态信息及障碍物进行姿态调整及障碍规避。
14.根据本发明的另一方面,提供一种组合传感器封装方法,对上述的组合传感器进行封装,方法包括:在基板上设置第一划胶区域和第二划胶区域;在第一划胶区域上粘贴压力ic芯片,在第二划胶区域上粘贴流速ic芯片;分别将压力ic芯片和流速ic芯片与基板进行打线连接;在压力ic芯片上设置第三划胶区域,在流速ic芯片上设置第四划胶区域;在第三划胶区域上粘贴压力mems芯片,在第四划胶区域上粘贴流速mems芯片;将压力ic芯片和压力mems芯片进行打线连接,以及将流速ic芯片与流速mems芯片进行打线连接;在基板上贴装具有流道孔的壳体,并在壳体内灌入防水胶。
15.此外,可选的技术方案是,在ic芯片及mems芯片粘贴完成后,还包括对第一划胶区域、第二划胶区域、第三划胶区域和第四划胶区域进行热固化处理。
16.利用上述组合传感器、电子设备及封装方法,将压力传感器和流速传感器封装在一个结构内,并通过壳体上设置的相互导通的流道孔,实现对外界压力及流速的检测,其中的压力传感器可通过流道孔感知流场环境中的液体或气体压力,而流速传感器可通过流道孔形成的流道感知流场环境中的液体流速,组合传感器的封装尺寸小,压力及流速的一致性能够得到保证,且可同时结合算法实现对航行器等电子设备的姿态监控和障碍规避。
17.为了实现上述以及相关目的,本发明的一个或多个方面包括后面将详细说明的特征。下面的说明以及附图详细说明了本发明的某些示例性方面。然而,这些方面指示的仅仅是可使用本发明的原理的各种方式中的一些方式。此外,本发明旨在包括所有这些方面以及它们的等同物。
附图说明
18.通过参考以下结合附图的说明,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
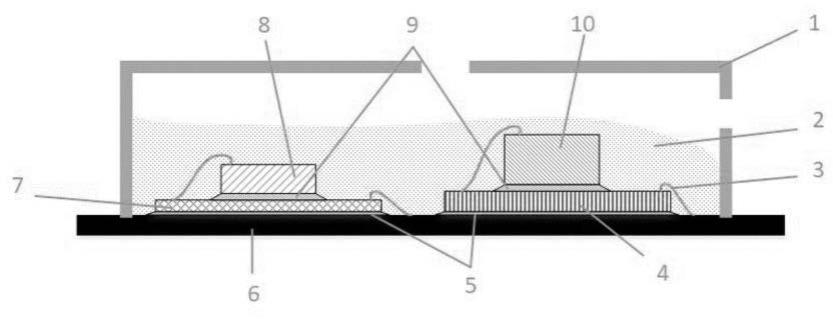
19.图1为根据本发明实施例的组合传感器的体结构示意图;
20.图2为根据本发明实施例的组合传感器的封装流程图一;
21.图3为根据本发明实施例的组合传感器的封装流程图二;
22.图4为根据本发明实施例的组合传感器的封装流程图三;
23.图5为根据本发明实施例的组合传感器的封装流程图四;
24.图6为根据本发明实施例的组合传感器的封装流程图五;
25.图7为根据本发明实施例的组合传感器的封装流程图六;
26.图8为根据本发明实施例的组合传感器的封装流程图七。
27.其中的附图标记包括:壳体1、防水胶2、第一电连接线31、第二电连接线32、流速ic芯片4、第一划胶区域51、第二划胶区域52、基板6、压力ic芯片7、压力mems芯片8、第三划胶区域91、第四划胶区域92、流速mems芯片10、第三电连接线13、第四电连接线14、第一流道孔15、第二流道孔16。
28.在所有附图中相同的标号指示相似或相应的特征或功能。
具体实施方式
29.在下面的描述中,出于说明的目的,为了提供对一个或多个实施例的全面理解,阐述了许多具体细节。然而,很明显,也可以在没有这些具体细节的情况下实现这些实施例。在其它例子中,为了便于描述一个或多个实施例,公知的结构和设备以方框图的形式示出。
30.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
31.为详细描述本发明内的组合传感器及其使用方法,以下将结合附图对本发明的具体实施例进行详细描述。
32.图1示出了根据本发明实施例的组合传感器的示意结构。
33.如图1所示,本发明实施例的组合传感器,包括基板6、与基板6形成封装结构的壳体1,以及设置在基板6上的流速传感器和压力传感器;其中,流速传感器包括设置在基板6上的流速ic芯片4和贴设在流速ic芯片4上的流速mems芯片10;压力传感器包括设置在基板6上的压力ic芯片7和贴设在压力ic芯片7上的压力mems芯片8;在壳体1上设置有至少两个相互导通的流道孔;压力传感器通过流道孔感知组合传感器所处流场环境中的液体或气体压力,流速传感器通过流道孔形成的流道感知流场环境中的液体流速,进而能够在较小封装尺寸的情况下,同时实现对液体流速和压力的检测。
34.其中,设置在壳体1上的流道孔可设置多个,但至少包括设置在壳体1的上端面的第一流道孔和设置在壳体1的侧面的第二流道孔;并且,第一流道孔和第二流道孔的孔径不同,较大孔径的流道孔用于辅助实现对液体压力的测试,提高测试准确度,较小孔径的流道孔用于配合其他的孔实现液体在壳体1内的流动,进而完成对液体流速的检测。
35.在本发明的具体示例中,设置在壳体1上端面的第一流道孔的孔径大于侧面的第二流道孔的孔径,第一流道孔和第二流道孔形成的导通通道,即流道,为了确保对流速的检测精度,流速mems芯片10可设置在导通通道内;换言之,流速mems芯片10设置在第一流道孔和第二流道孔之间的位置,以使液体在通过流道时,经过流速mems芯片10。
36.此外,压力mems芯片8可设置在基板6远离流道的一端,即将压力mems芯片8设置在壳体1内远离流道一侧的封闭端,以减小液体流动对压力mems芯片8造成的干扰。
37.可知,由于组合传感器可用于实现对液体的流速及压力检测,因此需要确保其防水性能,因此在壳体1内填充防水胶2;并且,防水胶2覆盖流速传感器和压力传感器,防水胶2可采用硅胶及环氧胶等,可在确保防水性能的同时,检测到外界的流场信号。
38.在本发明的一个具体实施方式中,流速ic芯片4和压力ic芯片7分别通过电连接线与基板6导通;流速mems芯片10通过电连接线与流速ic芯片4导通,压力mems芯片8通过电连接线与压力ic芯片7导通,进而实现各芯片之间以及芯片与基板6之间的信号传递。
39.与上述组合传感器相对应地,本发明还提供一种电子设备,包括上述的组合传感器及控制芯片;其中,控制芯片用于根据组合传感器检测的液体流速及压力信息,确定电子设备的姿态信息及预设范围内的障碍物,并基于姿态信息及障碍物进行姿态调整及障碍规避。
40.其中,电子设备可以是水下航行器等设备,在航行器内设置组合传感器及控制芯片,可通过控制芯片基于组合传感器检测到的压力及流速数据,实现对流体环境中航行器运动姿态的监控以及航行器的避障功能。
41.此外,考虑到水下航行器所处于的复杂流场环境,其雷诺数可以满足涡街的产生条件,因此可通过组合传感器探测流速进而确定自身的运动速度,通过探测压力得到自身周围流场环境中的障碍物距离与大小,进而通过算法实现避障功能等。
42.与上述组合传感器相对应,本发明还提供一种组合传感器封装方法,对上述的组合传感器进行封装。
43.具体地,图2至图8分别示出了根据本发明实施例的组合传感器的封装示意结构。
44.如图2至图8共同所示,本发明实施例的组合传感器封装方法,包括:
45.步骤一:在基板上设置第一划胶区域51和第二划胶区域52;
46.步骤二:在第一划胶区域51上粘贴压力ic芯片7,在第二划胶区域52上粘贴流速ic芯片4;
47.步骤三:分别将压力ic芯片7和流速ic芯片4与基板6进行打线连接;其中,压力ic芯片7通过第一电连接线31与基板6连接,流速ic芯片4通过第二电连接线32与基板6连接。
48.步骤四:在压力ic芯片7上设置第三划胶区域91,在流速ic芯片4上设置第四划胶区域92;
49.步骤五:在第三划胶区域91上粘贴压力mems芯片8,在第四划胶区域92上粘贴流速mems芯片10;
50.步骤六:将压力ic芯片7和压力mems芯片8通过第三电连接线13进行打线连接,将流速ic芯片4与流速mems芯片10通过第四电连接线14进行打线连接;
51.步骤七:在基板6上贴装具有流道孔的壳体1,并在壳体1内灌入防水胶,流道孔包括第一流道孔15和第二流道孔16。
52.为了确保各芯片的粘贴强度,在ic芯片(包括流速ic芯片和压力ic芯片)及mems芯片(包括流速mems芯片和压力mems芯片)粘贴完成后,还包括对第一划胶区域、第二划胶区域、第三划胶区域和第四划胶区域进行热固化处理的步骤。
53.具体地,上述电子设备、组合传感器封装方法的实施例可参考上述组合传感器实施例中的描述,此处不再一一赘述。
54.根据上述本发明的组合传感器、电子设备及封装方法,将压力传感器和流速传感器封装在一个结构内,并通过壳体上设置的相互导通的流道孔,实现对外界压力及流速的检测,流场内的压力可以通过流道孔传递到防水胶上,进而传递到压力mems芯片,感知流场环境中压力的变化;而组合传感器附近的流速可以通过壳体上方的流道孔与侧面流道孔形成完整流道,流速变化通过流速mems芯片感知,不仅封装尺寸小,压力及流速的一致性能够得到保证,且可同时结合算法实现对航行器等电子设备的姿态监控和障碍规避。
55.如上参照附图以示例的方式描述根据本发明的组合传感器、电子设备及封装方法。但是,本领域技术人员应当理解,对于上述本发明所提出的组合传感器、电子设备及封装方法,还可以在不脱离本发明内容的基础上做出各种改进。因此,本发明的保护范围应当由所附的权利要求书的内容确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1