用于防挤压监控的方法、控制器及工程机械与流程
本申请涉及工程机械控制,具体地涉及一种用于防挤压监控的方法、控制器及工程机械。
背景技术:
1、防挤压监控是运用于包括旋挖钻机等工程机械的一种保护功能。目前,现有的防挤压监控技术中仅有通过限位开关解决目标控制结构运动自由度两端极限的方式,通过限位开关保证机械机构的安全性。然而,现有技术仅通过限位开关实现角度极值的限制,安全值受机械结构限制无法自行设置,控制技术简陋,往往需要精确把控限位开关安装精度,增加了硬件成本。且整体结构发偏移时没有纠偏策略,会产生限位误差,从而导致精度不高且降低安全性。因此,现有技术所采用的防挤压监控技术存在成本较高且精度较低的问题。
技术实现思路
1、本申请实施例的目的是提供一种用于防挤压监控的方法、控制器及工程机械,用以解决现有技术所采用的防挤压监控技术存在成本较高且精度较低的问题。
2、为了实现上述目的,本申请第一方面提供一种用于防挤压监控的方法,应用于工程机械,工程机械包括桅杆,第一油缸和第二油缸,第一油缸和第二油缸用于控制桅杆,桅杆上设置有重力传感器,方法包括:
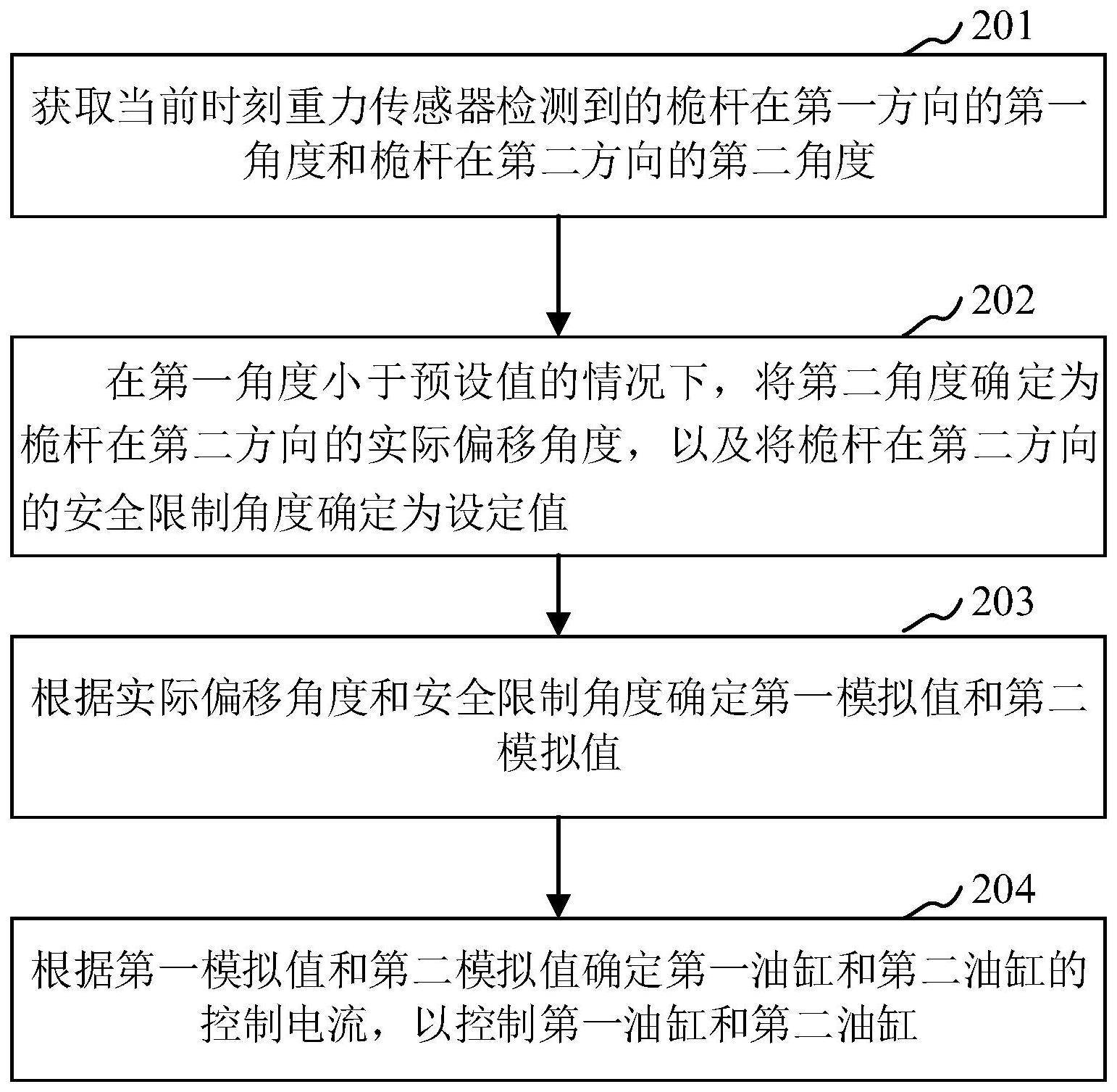
3、获取当前时刻重力传感器检测到的桅杆在第一方向的第一角度和桅杆在第二方向的第二角度;
4、在第一角度小于预设值的情况下,将第二角度确定为桅杆在第二方向的实际偏移角度,以及将桅杆在第二方向的安全限制角度确定为设定值;
5、根据实际偏移角度和安全限制角度确定第一模拟值和第二模拟值;
6、根据第一模拟值和第二模拟值确定第一油缸和第二油缸的控制电流,以控制第一油缸和第二油缸。
7、在本申请实施例中,工程机械还包括角度传感器,角度传感器设置于桅杆与桅杆的相邻机构的铰接处,方法还包括:
8、获取角度传感器检测到的桅杆与相邻机构在第二方向的第三角度;
9、在第一角度大于或等于预设值的情况下,将第三角度确定为桅杆在第二方向的实际偏移角度,并根据第一角度确定安全限制角度。
10、在本申请实施例中,第一方向平行于桅杆的运动平面和水平面,第二方向垂直于桅杆的运动平面。
11、在本申请实施例中,第一模拟值满足公式(1):
12、
13、第二模拟值满足公式(2):
14、
15、其中,b1为第一模拟值,b2为第二模拟值,a为安全限制角度,α为实际偏移角度,q为设定系数。
16、在本申请实施例中,第一油缸的控制电流包括第一伸展电流和第一收缩电流,第二油缸的控制电流包括第二伸展电流和第二收缩电流,根据第一模拟值和第二模拟值确定第一油缸和第二油缸的控制电流包括:
17、获取桅杆当前的初始第一伸展电流、初始第一收缩电流、初始第二伸展电流和初始第二收缩电流;
18、根据初始第一收缩电流、初始第二伸展电流和第一模拟值确定目标第一收缩电流和目标第二伸展电流;
19、根据初始第一伸展电流、初始第二收缩电流和第二模拟值确定目标第一伸展电流和目标第二收缩电流。
20、在本申请实施例中,根据初始第一收缩电流、初始第二伸展电流和第一模拟值确定目标第一收缩电流和目标第二伸展电流包括:
21、判断第一模拟值是否处于预设范围内;
22、在第一模拟值大于预设范围的最大值的情况下,将初始第一收缩电流确定为目标第一收缩电流,并将初始第二伸展电流确定为目标第二伸展电流;
23、在第一模拟值小于预设范围的最小值的情况下,目标第一收缩电流和目标第二伸展电流均为零;
24、在第一模拟值处于预设范围内的情况下,目标第一收缩电流满足公式(3),且目标第二伸展电流满足公式(4):
25、
26、
27、其中,m1为目标第一收缩电流,n2为目标第二伸展电流,m1为初始第一收缩电流,n2为初始第二伸展电流,min为控制第一油缸和第二油缸的电磁阀的阀最小电流,max为控制第一油缸和第二油缸的电磁阀的阀最大电流,b1为第一模拟值。
28、在本申请实施例中,根据初始第一伸展电流、初始第二收缩电流和第二模拟值确定目标第一伸展电流和目标第二收缩电流包括:
29、判断第二模拟值是否处于预设范围内;
30、在第二模拟值大于预设范围的最大值的情况下,将初始第一伸展电流确定为目标第一伸展电流,并将初始第二收缩电流确定为目标第二收缩电流;
31、在第二模拟值小于预设范围的最小值的情况下,目标第一伸展电流和目标第二收缩电流均为零;
32、在第二模拟值处于预设范围内的情况下,目标第一伸展电流满足公式(5),且目标第二收缩电流满足公式(6):
33、
34、
35、其中,n1为目标第一伸展电流,m2为目标第二收缩电流,n1为初始第一伸展电流,m2为初始第二收缩电流,b2为第二模拟值。
36、本申请实施例第二方面提供一种控制器,包括:
37、存储器,被配置成存储指令;以及
38、处理器,被配置成从存储器调用指令以及在执行指令时能够实现上述的用于防挤压监控的方法。
39、本申请实施例第三方面提供一种工程机械,包括:
40、上述控制器;
41、桅杆;
42、重力传感器,与控制器通信,设置于桅杆上,用于检测桅杆在第一方向的第一角度和桅杆在第二方向的第二角度并发送至控制器;
43、角度传感器,与控制器通信,设置于桅杆与桅杆的相邻结构的铰接处,用于检测桅杆与桅杆的相邻机构在第二方向的第三角度并发送至控制器;
44、第一油缸和第二油缸,用于控制桅杆。
45、本申请第四方面提一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行上述的用于防挤压监控的方法。
46、通过上述技术方案,获取当前时刻重力传感器检测到的桅杆在第一方向的第一角度和桅杆在第二方向的第二角度;在第一角度小于预设值的情况下,将第二角度确定为桅杆在第二方向的实际偏移角度,以及将桅杆在第二方向的安全限制角度确定为设定值;根据实际偏移角度和安全限制角度确定第一模拟值和第二模拟值;根据第一模拟值和第二模拟值确定第一油缸和第二油缸的控制电流,以控制第一油缸和第二油缸。本申请考虑到车身偏移等干扰条件,通过重力传感器实时监控桅杆的运动和偏移角度,以实现对桅杆实际偏移角度的实时运算,并与安全限制角度进行比较输出对应的纠偏策略,硬件成本较低且精度较高。
47、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于防挤压监控的方法,其特征在于,应用于工程机械,所述工程机械包括桅杆,第一油缸和第二油缸,所述第一油缸和所述第二油缸用于控制所述桅杆,所述桅杆上设置有重力传感器,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述工程机械还包括角度传感器,所述角度传感器设置于所述桅杆与所述桅杆的相邻机构的铰接处,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述第一方向平行于所述桅杆的运动平面和水平面,所述第二方向垂直于所述桅杆的运动平面。
4.根据权利要求1所述的方法,其特征在于,所述第一模拟值满足公式(1):
5.根据权利要求4所述的方法,其特征在于,所述第一油缸的控制电流包括第一伸展电流和第一收缩电流,所述第二油缸的控制电流包括第二伸展电流和第二收缩电流,所述根据所述第一模拟值和所述第二模拟值确定所述第一油缸和所述第二油缸的控制电流包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述初始第一收缩电流、所述初始第二伸展电流和所述第一模拟值确定目标第一收缩电流和目标第二伸展电流包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述初始第一伸展电流、所述初始第二收缩电流和所述第二模拟值确定目标第一伸展电流和目标第二收缩电流包括:
8.一种控制器,其特征在于,包括:
9.一种工程机械,其特征在于,包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至7中任一项所述的用于防挤压监控的方法。
技术总结
本申请公开了一种用于防挤压监控的方法、控制器及工程机械。该方法包括:获取当前时刻重力传感器检测到的桅杆在第一方向的第一角度和桅杆在第二方向的第二角度;在第一角度小于预设值的情况下,将第二角度确定为桅杆在第二方向的实际偏移角度,以及将桅杆在第二方向的安全限制角度确定为设定值;根据实际偏移角度和安全限制角度确定第一模拟值和第二模拟值;根据第一模拟值和第二模拟值确定第一油缸和第二油缸的控制电流,以控制第一油缸和第二油缸。本申请考虑到车身偏移等干扰条件,通过重力传感器实时监控桅杆的运动和偏移角度,以实现对桅杆实际偏移角度的实时运算,并与安全限制角度进行比较输出对应的纠偏策略,硬件成本较低且精度较高。
技术研发人员:应根美,何欢,冀永元,任礼,付存宝
受保护的技术使用者:上海中联重科桩工机械有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!