一种移动式拱架连续施工装置
本发明属于岩体力学,具体涉及一种移动式拱架连续施工装置。
背景技术:
1、目前在地下工程中,拱架的施工处于半自动机械施工,不仅会消耗大量的人力物力,而且施工工程中可能会出现冒顶、坍塌、拱架失效等安全问题。施工现场地形复杂,普通拱架施工台车难以快速稳定地到达制定位置,人力定位拱架和安装会影响其他工序施工,在进行拱架定位和固定时,人工操作的施工质量的难以保证。同时,在拱架的安装期间,难以对拱架施加稳定有效的预应力。保证拱架稳定承载。目前部分施工台车需要不断展开和收回侧翼,施工人员需要上下台车,无法进行连续性施工,并且施工期间的安全无法保证,大幅度增加工期和耗费。目前拱架的安全、快速、连续施工没有相适用的机械设备。
2、因此,有必要提出一种移动式拱架连续施工装置解决上述问题。
技术实现思路
1、根据上述,本发明提供一种移动式拱架连续施工装置。利用该装置可较为方便实现拱架连续性施工,快速完成拱架抬升、定位和固定等工作,人工与机械相互配合,提高工作效率,并可有效保证施工人员的安全。
2、本实用新型采用以下的技术方案:
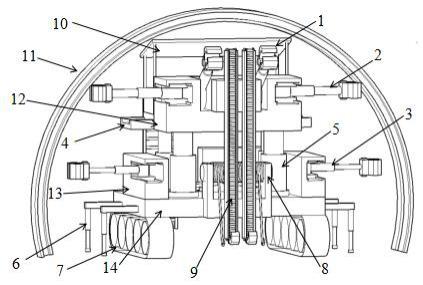
3、一种移动式拱架连续施工装置,包括拱顶机械手臂、拱肩机械手臂、拱腰机械手臂、水平滑轨、四个竖向液压器、四个蛙式支腿、两条履带、抬升轮机、两条爬升链杆、施工平台、拱架、上部反力座、两个下部反力座、平台基座、两个爬梯、施工平台基座、动力装置、操作台。其中还包括部分细部结构,在下部装置中有液压管、轮机轴、两个提升钩;拱顶机械臂、拱肩机械臂、拱腰机械臂中均有两个滑动座、轴向液压器、万向转轴、机械爪、转动轴;爬升链杆中有爬升链条、固定爬杆、机械钩;施工平台中有保护顶板、四个支撑柱、保护围栏。
4、其中拱顶机械手臂、拱肩机械手臂与上部反力座之间,拱腰机械手臂与下部反力座之间均是采用机械连接。各个机械手臂中滑动座、轴向液压器、万向转轴、机械爪、转动轴之间也采用机械连接,滑动座提供纵向位移,轴向液压器提供横向位移,万向转轴使机械爪全方位转动,转动轴保证轴向液压器自由转动。
5、其中上部反力座、施工平台与竖向液压器之间采用焊接连接。竖向液压器、蛙式支腿、抬升轮机、下部反力座、爬梯、动力装置、操作台与平台基座之间采用焊接连接,履带与平台基座之间采用机械连接。施工平台中有保护顶板、四个支撑柱、保护围栏各部分间均采用焊接连接,施工平台基座与水平滑轨之间采用机械连接。液压管与动力装置、竖向液压器、下部反力座之间均采用机械连接。爬升链条在固定爬杆中可自由滑动,爬升链条与机械钩间采用焊接连接。
6、优选地,所述的装置整体采用优钢材质。
7、优选地,所述的装置的外壳均采用防锈工艺进行处理。
8、优选地,所述的装置的施工平台的保护顶板由吸能材料组成。
9、本实用新型的有益效果是:
10、(1)可以快速就位,有序完成抬升、定位。固定等工序,不干扰其他施工进行。
11、(2)对硐室的尺寸适应性强,可多台装置配合进行拱架施工。
12、(3)整个装置的运行完全通过操作台实现,操作简单,电脑控制精细化程度高。
13、(4)减少人员上下装置时间,提高工作效率,增加了保护装置,有效保证安全施工。
技术特征:
1.一种移动式拱架连续施工装置,包括拱顶机械手臂(1)、拱肩机械手臂(2)、拱腰机械手臂(3)、水平滑轨(4)、竖向液压器(5)、蛙式支腿(6)、履带(7)、抬升轮机(8)、爬升链杆(9)、施工平台(10)、拱架(11)、上部反力座(12)、下部反力座(13)、平台基座(14)、爬梯(15)、施工平台基座(16)、动力装置(17)、操作台(18),其特征在于,所述平台基座(14)固定连接有履带(7);所述平台基座(14)焊接有蛙式支腿(6);所述平台基座(14)固定连接有抬升轮机(8)、爬梯(15)、操作台(18);所述抬升轮机(8)焊接有爬升链杆(9);所述平台基座(14)固定连接有竖向液压器(5)、动力装置(17)、下部反力座(13);所述下部反力座(13)滑动连接有拱腰机械手臂(3);所述竖向液压器(5)焊接有上部反力座(12);所述上部反力座(12)滑动连接有拱肩机械手臂(2);所述上部反力座(12)转动连接有拱顶机械手臂(1);所述上部反力座(12)焊接有施工平台基座(16);所述施工平台基座(16)滑动连接有施工平台(10)。
2.根据权利要求1所述的一种移动式拱架连续施工装置,其特征在于,拱腰机械手臂(3)包括滑动座(201)、轴向液压器(202)、万向转轴(203)、机械爪(204)、转动轴(205);所述滑动座(201)插接有转动轴(205);所述转动轴(205)转动连接有轴向液压器(202);所述轴向液压器(202)固定连接有万向转轴(203);所述万向转轴(203)转动连接有机械爪(204)。
3.根据权利要求1所述的一种移动式拱架连续施工装置,其特征在于,爬升链杆(9)包括爬升链条(301)、固定爬杆(302)、机械钩(303);所述固定爬杆(302)安装有可自由滑动的爬升链条(301);所述爬升链条(301)固定连接有机械钩(303)。
4.根据权利要求1所述的一种移动式拱架连续施工装置,其特征在于,施工平台(10)包括保护顶板(401)、支撑柱(402)、保护围栏(403);所述保护围栏(403)焊接有支撑柱(402);所述支撑柱(402)固定连接有保护顶板(401)。
技术总结
一种移动式拱架连续施工装置,包括机械手臂、水平滑轨、竖向液压器、蛙式支腿、两履带、抬升轮机、爬升链杆、施工平台、反力座、平台基座、爬梯、施工平台基座、动力装置、操作台等结构;在使用过程中,装置可迅速进场,机械手臂展开完成就位。操作台控制抬升轮机和爬升链杆完成拱架抬升工作。竖向液压器和机械手臂等装置相互配合保证拱架位置和角度精确控制,轴向液压器为拱架安装提供预紧力,方便后续工作。施工平台移动自由为人工辅助安装提供便利,平台安全防护装置提供安全保证;操作台可控制整个装置运行,实时控制拱架安装进程,精确定位拱架安装位置,实现拱架各个工序有序进行,同时装置的高机动性保证拱架的连续施工,提高效率。
技术研发人员:李椿萌,陈闯,薛洪运,杨旭旭,王世成,张晓娜
受保护的技术使用者:山东科技大学
技术研发日:20230317
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!