盾构上方地层多形态联合布置沉降智能控制及回收装置的制作方法
本发明涉及地铁盾构沉降控制相关领域,特别是涉及盾构上方地层多形态联合布置沉降智能控制及回收装置。
背景技术:
1、随着国民经济的迅速发展,城市的规模和人口在不断增长,为缓解随之而来的交通压力,地下交通得以快速发展,如地铁隧道、快速路隧道等。地铁隧道作为城市地下交通的主要建筑设施在修建过程中需要盾构施工。盾构会影响土体原本的应力场和位移场,导致地表土体发生变形,为了保证地上建筑设施的安全,需要对土体的进行变形控制(沉降和隆起)。目前现有的注浆加固装置存在以下3个问题:
2、1、在注浆加固过程中对土体也有影响,施工后土体性质改变和遗留孔洞等问题导致的沉降难以解决;
3、2、加固过程中高压引起土体变形,影响范围大,对环境和后续施工影响较大;
4、3、加固形式为连续桩体,没有对加固体的组合进行优化,组合形式单一,没有起到联合作用。
5、因此,如何科学有效、安全环保地进行土体变形控制是一个需要亟待解决的突出难题。
技术实现思路
1、为了克服已有盾构施工过程中沉降变形和组合形式单一的问题,本发明提供了一种盾构上方地层多形态联合布置沉降智能控制及回收装置,能有效的控制沉降,而且简单易行、操作方便、造价低、绿色环保。
2、本发明解决其技术问题所采用的技术方案是:
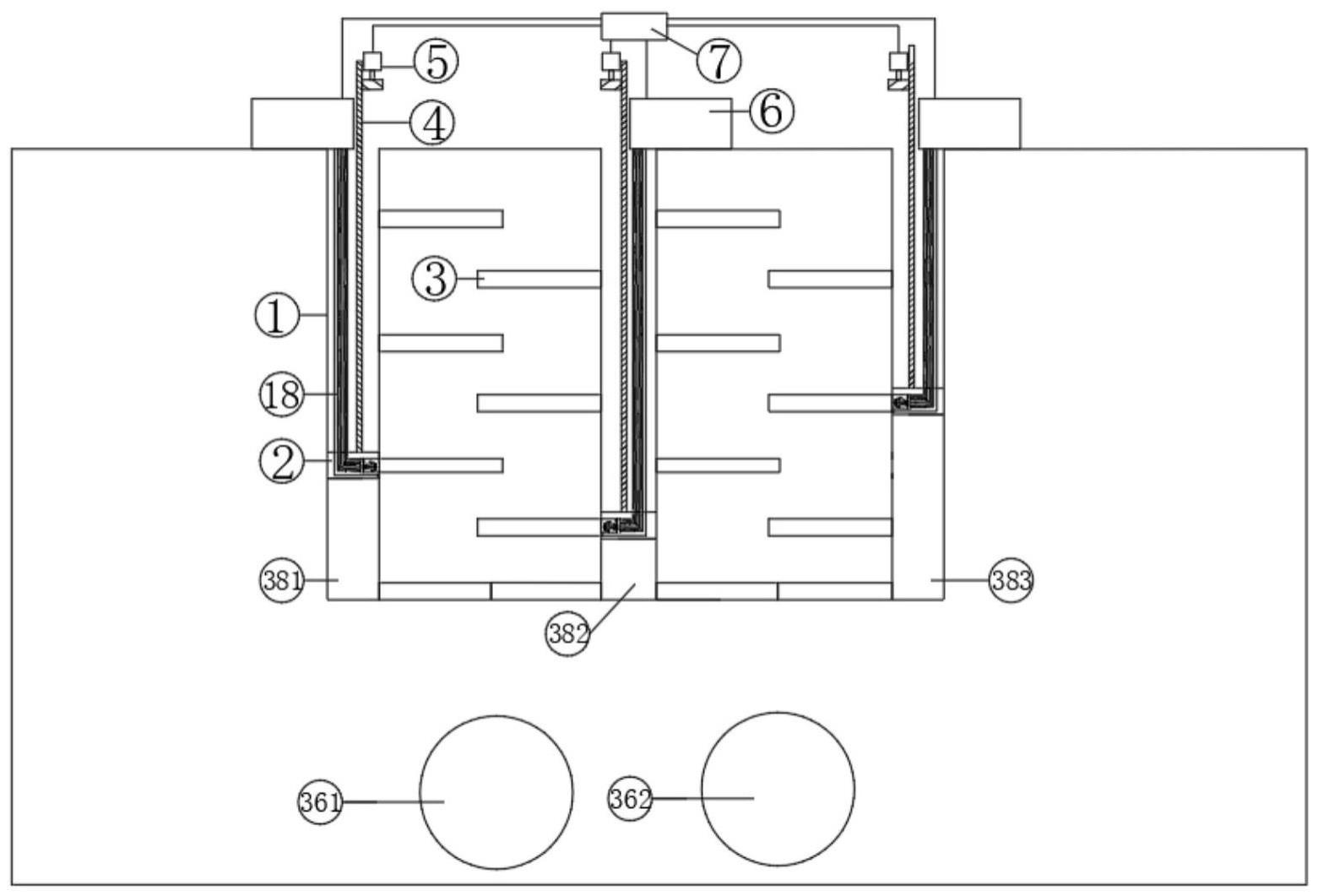
3、一种盾构上方地层多形态联合布置沉降智能控制及回收装置,包括防护管、交换机、膨胀体、转轴、数控电机、多通道注压机和计算机控制系统,所述防护管为空心圆管,底部封闭;所述防护管包括标准管和伸出管,所述膨胀体和伸出管连接,转轴连接数控电机和交换机,所述数控电机通过正、反转动来带动转轴和交换机同向转动,使得交换机在防护管中上、下移动,所述多通道注压机通过管线群和交换机连接;所述计算机控制系统与数控电机和多通道注压机连接,实时显示各组成装置的相关数据,能够控制数控电机和多通道注压机。
4、进一步,所述标准管包括限位管节和吊耳,限位管节为标准管上的均布凹槽,在土体中控制防护管的沉降,吊耳为起吊构件。
5、再进一步,所述标准管和伸出管之间设有止水橡胶,避免地下水进入防护管中,标准管和伸出管之间通过连接螺纹连接。
6、更进一步,所述伸出管包括挡土门、弹簧、接口、卡块和定位器,挡土门和伸出管之间通过铰链连接,可以转动,弹簧与卡块连接,常规状态下处于伸展状态。优选的,挡土门由2个钝角三角形的挡板组成,可以使得在常规状态为关闭状态,2个挡板之间采用错齿咬合。
7、所述管线群包括定位响应器线圈、伸缩缸气管、电磁控制器线圈、输入管、伸缩杆气管、输出管和卡块气管,分别与交换机中的定位响应器、伸缩缸、电磁控制器a和b、输入口、伸缩杆和输出口连接,伸缩缸与伸缩块连接,可以推动伸缩块来回移动,输入管、伸缩杆气管、输出管和卡块气管的端头设有气塞,同电磁控制器a和b一起固定在伸缩块上,可以随伸缩块来回移动;定位响应器和定位器接触时会产生电磁感应并被计算机控制系统接收,以此来完成定位。
8、转换头位于交换机中的移动空间中,所述转换头包括尖头锥、环箍、限位块、气囊、气囊转轴、输入阀门、输出阀门、输入管接口、伸缩杆接口、输出管接口、伸缩杆、输入口和输出口,尖头锥与气囊一端连接,另外一端的上下层通过气囊转轴进行收卷,并被环箍和限位块固定在转换头上;电磁控制阀门a和电磁控制阀门b分别是控制输入阀门和输出阀门的开关,继而控制输入口和输出口的开关;输入管接口、伸缩杆接口和输出管接口与气塞形状匹配,接触后可以密封;限位块由四块限位块组成,伸缩杆固定在转换头中,可以在气囊内进行多级伸缩,所述伸缩杆的端头可以顶住尖头锥向外移动。
9、所述转换头设有卡块凹槽并与卡块相匹配,可以被卡块限位固定。
10、所述气囊末端与气囊转轴粘接,能够承受一定的拉力,长度要求根据膨胀体长度提前设定;所述限位块与气囊接触处设有锯齿状槽纹,外部设有放置环箍的沟槽。
11、所述尖头锥为尖锥状,利于破开土体,尾部呈圆弧状,利于恢复土体中被破开的空隙。
12、所述气塞共有四个,位于伸缩块上,与相应的接口对齐;伸缩块移动过程中,其上的电磁控制器a、b和气塞随之运动。
13、本发明的有益效果主要表现在:
14、1、多形态布置,适用面广。装置可以通过调整防护管数量、伸出管的高度位置和挡土门的数量,在沉降控制区域外围形成多种膨胀体的分部形式,满足各种场地的需求,适用面广。
15、2、隔离土体,一机多头。伸出管和标准管之间采用了隔水橡胶,伸出管上设有挡土门隔离土体,利用了气囊在膨胀时限位块在气压越大密闭性越好的特性进行隔离密封。实现了一个交换机对接多个转换头,完成对各气囊的气压调控,减少了管线群的数量。
16、3、智能操作,绿色环保。在地下土层中通过装置实现了交换机的精确定位悬停、转换头的安装和回收、气囊的预埋、膨胀和脱离等作业,避免人工操作;气囊和尖头锥可以自行降解,其余装置构件皆可回收重复利用,避免遗留在土体中而造成环境破坏和资源浪费。
技术特征:
1.一种盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述装置包括防护管、交换机、膨胀体、转轴、数控电机、多通道注压机和计算机控制系统,所述防护管为空心圆管,底部封闭;所述防护管包括标准管和伸出管,所述膨胀体和伸出管连接,转轴连接数控电机和交换机,所述数控电机通过正、反转动来带动转轴和交换机同向转动,使得交换机在防护管中上、下移动,所述多通道注压机通过管线群和交换机连接;所述计算机控制系统与数控电机和多通道注压机连接,实时显示各组成装置的相关数据,能够控制数控电机和多通道注压机。
2.如权利要求1所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述标准管包括限位管节和吊耳,限位管节为标准管上的均布凹槽,在土体中控制防护管的沉降,吊耳为起吊构件。
3.如权利要求1或2所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述标准管和伸出管之间设有止水橡胶,避免地下水进入防护管中,标准管和伸出管之间通过连接螺纹连接。
4.如权利要求1或2所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述伸出管包括挡土门、弹簧、接口、卡块和定位器,挡土门和伸出管之间通过铰链连接,可以转动,弹簧与卡块连接,常规状态下处于伸展状态。
5.如权利要求1或2所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述管线群包括定位响应器线圈、伸缩缸气管、电磁控制器线圈、输入管、伸缩杆气管、输出管和卡块气管,分别与交换机中的定位响应器、伸缩缸、电磁控制器a和b、输入口、伸缩杆和输出口连接,伸缩缸与伸缩块连接,可以推动伸缩块来回移动,输入管、伸缩杆气管、输出管和卡块气管的端头设有气塞,同电磁控制器a和b一起固定在伸缩块上,可以随伸缩块来回移动;定位响应器和定位器接触时会产生电磁感应并被计算机控制系统接收。
6.如权利要求1或2所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,转换头位于交换机中的移动空间中,所述转换头包括尖头锥、环箍、限位块、气囊、气囊转轴、输入阀门、输出阀门、输入管接口、伸缩杆接口、输出管接口、伸缩杆、输入口和输出口,尖头锥与气囊一端连接,另外一端的上下层通过气囊转轴进行收卷,并被环箍和限位块固定在转换头上;电磁控制阀门a和电磁控制阀门b分别是控制输入阀门和输出阀门的开关,继而控制输入口和输出口的开关;输入管接口、伸缩杆接口和输出管接口与气塞形状匹配,接触后可以密封;限位块由四块限位块组成,伸缩杆固定在转换头中,可以在气囊内进行多级伸缩,所述伸缩杆的端头可以顶住尖头锥向外移动。
7.如权利要求6所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述转换头设有卡块凹槽并与卡块相匹配,可以被卡块限位固定。
8.如权利要求6所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述气囊末端与气囊转轴粘接,能够承受一定的拉力,长度要求根据膨胀体长度提前设定;所述限位块与气囊接触处设有锯齿状槽纹,外部设有放置环箍的沟槽。
9.如权利要求6所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述尖头锥为尖锥状,利于破开土体,尾部呈圆弧状,利于土体填补破开的空隙恢复。
10.如权利要求5所述的盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述气塞共有四个,位于伸缩块上,与相应的接口对应;伸缩块移动过程中,其上的电磁控制器a、b和气塞随之运动。
技术总结
一种盾构上方地层多形态联合布置沉降智能控制及回收装置,其特征在于,所述装置包括防护管、交换机、膨胀体、转轴、数控电机、多通道注压机和计算机控制系统,所述防护管为空心圆管,底部封闭;所述防护管包括标准管和伸出管,所述膨胀体和伸出管连接,转轴连接数控电机和交换机,所述数控电机通过正、反转动来带动转轴和交换机同向转动,使得交换机在防护管中上、下移动,所述多通道注压机通过管线群和交换机连接;所述计算机控制系统与数控电机和多通道注压机连接,实时显示各组成装置的相关数据,能够控制数控电机和多通道注压机。本发明能有效的控制沉降,而且简单易行、操作方便、造价低、工期短。
技术研发人员:苟学登,杨琛,田野,赵伟伟,王子瑞,何水林,何雷
受保护的技术使用者:中国水利水电第四工程局有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!