一种基于前视全景钻孔摄像的虚拟岩芯成像设备及方法
本发明涉及工程地质勘察领域,属于地质钻孔分析技术,具体涉及一种基于前视钻孔摄像的虚拟岩芯建模技术。
背景技术:
1、在施工过程中,常常需要了解工程所处地区岩体的力学特性及其稳定性信息。而岩体中结构面的类别属性、分布疏密和发育情况等特性是影响岩体结构稳定性、力学特性和工程特性的关键因素。许多重大工程事故的发生往往是由于在施工初期,不清晰岩体的内部构造,对存在的裂隙、破裂面和软弱夹层等薄弱结构面勘察不准导致的。因此,如何准确的掌握和描述岩体内部结构和力学特性是工程中不断精进的重要课题。
2、前视全景钻孔摄像系统是一项常用的钻孔勘察手段。其通过安装在探头顶端的ccd摄像头采集孔壁的影像数据,传输到监视器上供工程人员实时监测,并输出到记录仪上存档以备后续的调用和分析。工程人员可通过监测端/记录端观测有效光照区域内的孔壁视频录像,并以视频回放或屏幕截图的方式对岩体进行分析。该系统适用范围广,对钻孔质量要求较低,且设备轻巧,价格低廉,但缺点是图像数据量大,无法提供钻孔的全景展开图和“虚拟岩芯”模型,导致对岩体的定量分析能力较弱。
技术实现思路
1、本发明所要解决的技术问题是:优化现有设备的定量分析能力,实现钻孔岩壁的全景展开和“虚拟岩芯”构建,通过耦合图像处理、视觉重建和点云建模等领域的方法,实现从孔壁的影像数据中快速拼接融合出岩芯的全景展开图,并且实现岩芯三维模型的“升维”反演。
2、为了解决以上技术问题,本发明采用了如下技术方案:
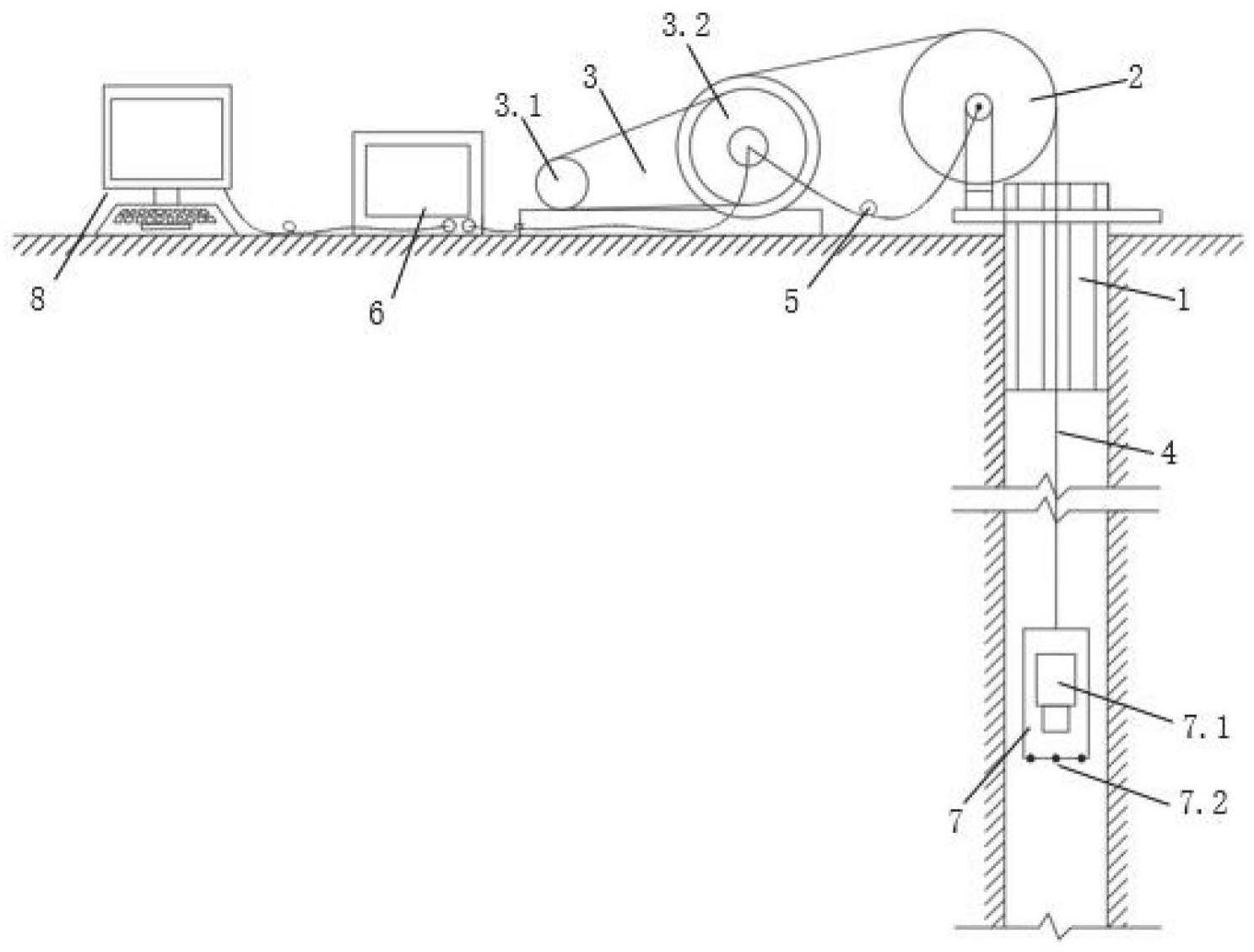
3、首先,本发明提出一种基于前视全景钻孔摄像的虚拟岩芯成像设备,包括:孔口支架、深度编码器、电动绞盘、视频传输线、数据传输线、控制主机、测量探头、计算机系统;其中,
4、所述孔口支架,放置于在钻孔的孔口上方;
5、所述电动绞盘,包括步进电机、线缆圆盘,所述步进电机用于驱动线缆圆盘转动,提供平稳的下放或提拉速度;其中线缆圆盘通过一固定结构与孔口支架相连接;
6、所述深度编码器,安装在孔口支架上,用于记录实时的测量探头的深度信息,以及视频传输线的收放长度;
7、所述视频传输线,用于传输测量探头录制的影像数据,其一端与测量探头连接,另一端通过深度编码器后缠绕在线缆圆盘上;
8、所述数据传输线,用于传输带有深度值的影像数据,其一端连接深度编码器,另一端通过电动绞盘依次连接控制主机以及计算机系统;
9、所述测量探头,用于录制钻孔岩壁影像数据,其通过视频传输线被电动绞盘控制于钻孔中匀速下放至孔底后再提拉至孔口;所述测量探头包括无畸变摄像头和照明装置,其中,无畸变摄像头用以采集钻孔岩壁影像数据,在放置时与钻孔保持同轴放置;
10、所述控制主机,根据实时接收的影像数据进行抽帧形成图像序列,并将图像序列与探头深度信息进行时间匹配,生成带有探头深度信息的钻孔图像序列;
11、计算机系统,用于根据带有探头深度信息的钻孔图像序列对钻孔岩壁进行三维重建与钻孔岩壁图像拼接,构建出虚拟岩芯。
12、另一方面,本发明还提出一种基于所述虚拟岩芯成像设备的成像方法,具体步骤如下:
13、步骤s1、将测量探头与孔口轴心对齐,操作控制主机启动设备,归零深度编码器,并检查控制主机是否有钻孔图像的实时反馈;
14、步骤s2、调试成功后,启动步进电机,使测量探头匀速下降到孔底;稳定一段时间,启动步进电机上拉测量探头并实时传输钻孔岩壁影像数据,深度编码器将测量探头在钻孔中的实时深度传输给控制主机;控制主机对影像数据进行抽帧形成图像序列,并将图像序列与探头深度进行时间上的匹配,生成带有探头深度信息的钻孔图像序列;
15、步骤s3、针对钻孔图像序列,采用霍夫圆检测法识别钻孔中心和岩环的最小半径rmin;
16、步骤s4、通过掩码序列对钻孔图像序列进行划分,生成有效图像序列;
17、步骤s5、分别提取有效图像序列的dsp-sift特征和superpoint特征,并进行顺序匹配;
18、步骤s6、分别将所有匹配好的dsp-sift特征和superpoint特征投影到图像上,并通过匹配对生成图像序列的特征关联网络v=(i,t,l),其中i为有效图像,t为特征点轨迹,l为轨迹的边,同时采用测地线一致性对特征关联网络进行误匹配剔除;
19、步骤s7、通过初始搭建、深度计算、捆绑优化模块构建岩芯模型的归一化模型;
20、步骤s8、使用统计去噪算法来去除模型噪点,并基于有效图像序列的深度值实现归一化模型的尺度恢复;
21、步骤s9、采用fpfh特征进行粗匹配,然后采用icp算法实现岩芯三维模型的精确耦合;
22、步骤s10、通过基于随机一致性采样算法对岩芯三维模型进行圆柱拟合,获得钻孔轴线以及圆柱半径r,计算岩芯三维模型上3d点到圆柱轴线的垂直距离并与圆柱半径r相减,获得3d点轴向深度信息;
23、步骤s11、对有效图像序列进行抽稀和筛选,生成环形图像序列,通过矩形展开图的笛卡尔坐标系与环形图像序列的极坐标系之间的坐标变换关系,构建两者的像素映射关系;并结合双线性插值算法进行图像展开;
24、步骤s12、通过模板匹配方法进行矩形展开图的拼接匹配:首先设置上一帧图像为参考帧,当前帧图像为目标帧,并在参考帧图像中选择模板图像与当前帧进行模板匹配;利用模板匹配算法获得两帧图像的匹配参数,以进行矩形展开图的拼接匹配,然后,将拼接生成的新图像再与下一帧进行模板匹配与拼接,最后拼接成为一幅完整的全景孔壁展开图;
25、步骤s13、采用相互赋值的方式将岩芯三维模型和全景孔壁展开图相互关联:根据岩芯三维模型的轴向深度信息,将岩芯三维模型的每个3d点映射到全景孔壁展开图上,形成具有高程信息的点云模型,并根据全景孔壁展开图中对应位置的rgb信息对3d点赋予颜色,生成实景孔壁展开图;最后,将3d点的rgb信息赋予岩芯三维模型,生成岩芯实景三维模型。
26、本发明采用以上技术方案,与现有技术相比具有的技术效果是:
27、1)本发明实现了全景孔壁展开图的轴向深度赋予,能快速有效地生成高质量的实景孔壁展开图。
28、2)本发明通过依靠图像序列来实现岩芯实景三维模型的构建,让地层数据三维化,可视化,大大降低了二维判读结果的偏差。
29、3)本发明将技术难题融合在算法层面,所需配套成本较低;且基本基于现有的钻孔摄像系统,可迅速融入现有地质勘探等领域的工作中。
技术特征:
1.一种基于前视全景钻孔摄像的虚拟岩芯成像设备,其特征在于,包括:孔口支架(1)、深度编码器(2)、电动绞盘(3)、视频传输线(4)、数据传输线(5)、控制主机(6)、测量探头(7)、计算机系统(8);其中,
2.一种基于权利要求1所述虚拟岩芯成像设备的成像方法,其特征在于,具体步骤如下:
3.根据权利要求2所述的成像方法,其特征在于,步骤s3中所采用的霍夫圆检测法具体采用canny边缘检测算法处理钻孔图像,包括:
4.根据权利要求2所述的成像方法,其特征在于,步骤s5中,dsp-sift特征计算方法如下:
5.根据权利要求2所述的成像方法,其特征在于,步骤s6中,采用测地线一致性对特征关联网络进行误匹配剔除,并采用评价指标对剔除误匹配后的新关联网络v′=(i,t′,l′)进行评价,评价指标如下:
6.根据权利要求2所述的成像方法,其特征在于,步骤s7中,构建岩芯模型的归一化模型,其中
7.根据权利要求2所述的成像方法,其特征在于,步骤s9中,
8.根据权利要求2所述的成像方法,其特征在于,步骤s10中,圆柱的数学模型如下:
9.根据权利要求2所述的成像方法,其特征在于,步骤s11中,结合双线性插值算法进行图像展开,具体流程如下:
10.根据权利要求9所述的成像方法,其特征在于,步骤s12中,模板匹配方法的具体如下:
技术总结
本发明公开一种基于前视全景钻孔摄像的虚拟岩芯成像设备及方法,虚拟岩芯成像设备由收放线架孔口支架、深度编码器、电动绞盘、视频传输线、数据传输线、控制主机、测量探头、计算机及配套软件系统等部件组成。虚拟岩芯成像方法是采用改良的前视全景钻孔摄像系统沿孔持续拍摄,以采集钻孔的高质量岩壁图像序列,并基于图像预处理算法、钻孔岩壁三维重建算法、钻孔岩壁图像拼接算法、实景模型生成算法处理岩壁图像序列,实现实景孔壁展开图和岩芯实景三维模型的构建。本发明从三维模型和展开图两个角度进行地层地质的描述,实现全维度、高精度的钻孔信息分析,能够更加精确监测斜管的变形,为工程的安全稳定提供了保障。
技术研发人员:何磊,楚宇扬,徐浩若,卫海,肖怀广,王睿华,郑彦龙
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!