一种刮板保护控制方法及工程车辆与流程
本发明涉及工程设备,具体而言,涉及一种刮板保护控制方法及工程车辆。
背景技术:
1、隧道断面喷射在岩壁上的混凝土时常出现不平整的现象,因此通常需要利用刮板把混凝土均匀抹平,以对隧道断面进行整形。
2、由于刮板受到驱动机构以及隧道岩壁的作用,刮板容易损坏。现有的设备通常在刮板设置传感器,但其传感器无法直接获取刮板与岩壁接触处的力,因此无法准确地获取刮板的受力情况,仍然导致刮板的受损率较高。
技术实现思路
1、本发明提供了一种刮板保护控制方法及工程车辆,其通过控制驱动机构的输出力矩,避免第三作用力信息大于刮板的最大受力信息,从而避免了刮板因受力过大而损坏,有效地保护了刮板,显著提高了刮板的使用寿命。
2、本发明的实施例可以这样实现:
3、第一方面,本发明提供一种刮板保护控制方法,用于保护刮板,所述刮板包括第一接触点、第二接触点以及所述第三接触点,所述第一接触点位于所述第二接触点和所述第三接触点之间,所述第一接触点用于进行受力检测,所述第二接触点用于施加驱动力,所述第三接触点用于与待整形件接触,所述刮板保护控制方法包括以下步骤:
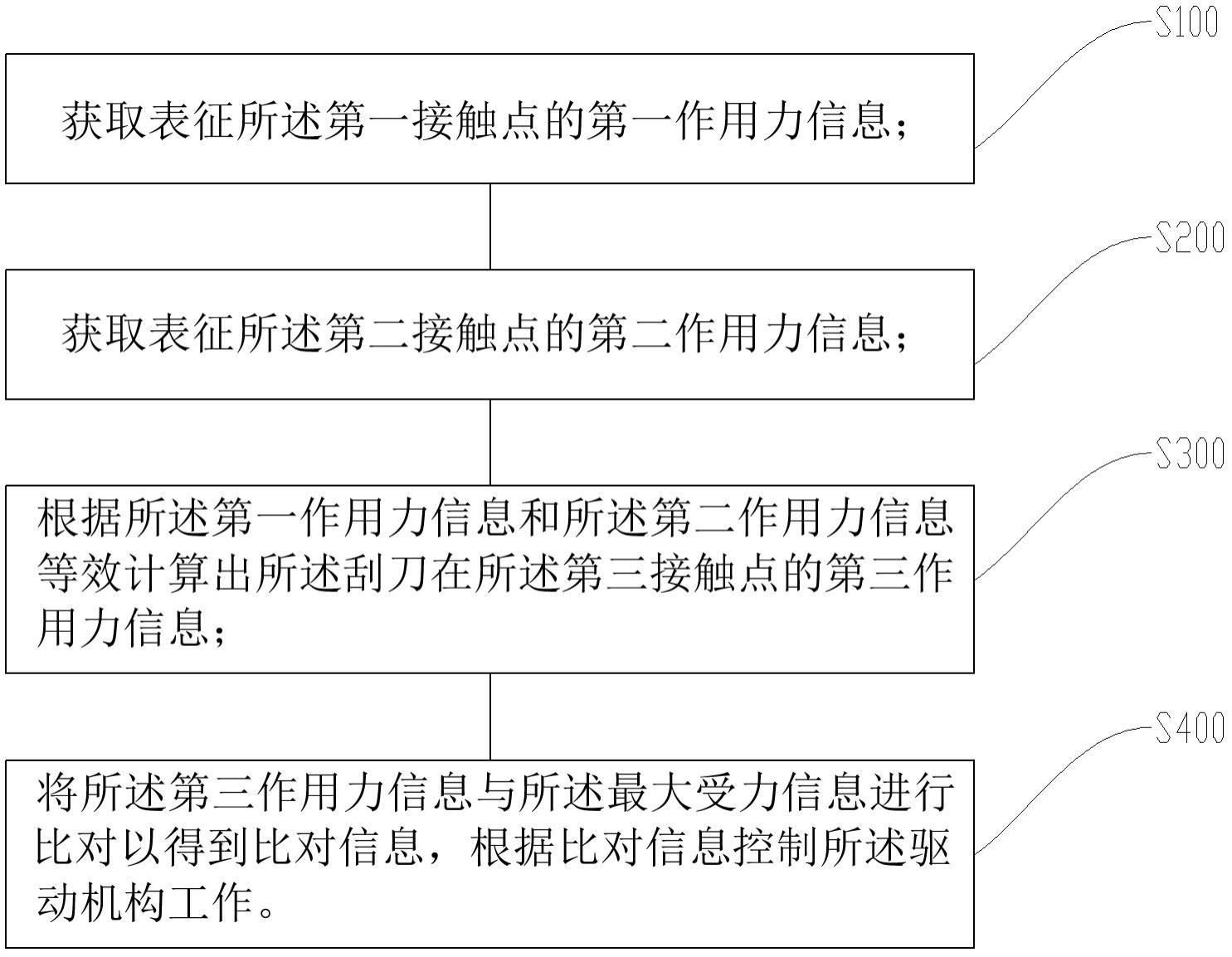
4、获取表征所述第一接触点的第一作用力信息;
5、获取表征所述第二接触点的第二作用力信息;
6、根据所述第一作用力信息和所述第二作用力信息等效计算出所述刮板在第三接触点的第三作用力信息;
7、将所述第三作用力信息与所述刮板的最大受力信息进行比对以得到比对信息,根据比对信息控制驱动机构工作。
8、在可选的实施方式中,所述刮板保护控制方法的步骤还包括:
9、根据所述刮板的材料信息计算所述刮板的最大受力信息。
10、在可选的实施方式中,所述刮板的最大受力信息通过有限元分析获取。
11、在可选的实施方式中,所述根据所述刮板的材料信息计算所述刮板的最大受力信息的步骤包括:
12、根据所述刮板的材料信息计算得出所述刮板的最大允许应力;
13、根据所述最大允许应力计算得出所述刮板的最大允许弯矩。
14、在可选的实施方式中,所述根据所述刮板的材料信息计算得出所述刮板的最大允许应力的步骤包括:
15、依据以下公式计算得到所述最大允许应力:
16、;
17、其中,表示最大允许应力,e为所述刮板的材料的弹性模量,为应变系数。
18、在可选的实施方式中,所述根据所述最大允许应力计算得出所述刮板的最大允许弯矩的步骤包括:
19、依据以下公式计算得到所述最大允许弯矩:
20、;
21、其中,wz为g点的抗弯矩截面系数,ks为安全系数。
22、在可选的实施方式中,所述根据所述第一作用力信息和所述第二作用力信息等效计算出所述刮板在第三接触点的第三作用力信息的步骤包括:
23、依据以下公式计算得到所述第三作用力信息:
24、;
25、其中,表征所述第一作用力信息,其为在所述刮板的所述第一接触点相对所述第三接触点的矢量力矩,x2为所述第一接触点与所述第二接触点的距离,a为所述刮板的形变系数;表征所述第二作用力信息,其为所述驱动机构对所述刮板在所述第二接触点形成的合力矢量力矩;表征所述刮板在所述第三接触点受到x轴、y轴以及z轴的分力总和,表征所述第三接触点相对所述第二接触点的力臂。
26、在可选的实施方式中,所述将所述第三作用力信息与所述刮板的最大受力信息进行比对以得到比对信息,根据比对信息控制驱动机构工作的步骤包括:
27、将所述最大受力信息对应的数值与所述第三作用力信息对应的数值相减以得到所述比对信息;
28、在所述比对信息大于或等于预设阈值的情况下,控制所述驱动机构正常运行;
29、在所述比对信息小于预设阈值的情况下,发出预警信号并控制所述驱动机构停止工作。
30、在可选的实施方式中,所述在所述比对信息小于预设阈值的情况下,发出预警信号并控制所述驱动机构停止工作的步骤之后,所述刮板保护控制方法还包括:
31、控制所述驱动机构调整所述刮板的姿态及位置,并重新向所述刮板输出驱动力;
32、在所述比对信息大于或等于预设阈值的情况下,停止发出所述预警信号并控制所述驱动机构正常运行。
33、第二方面,本发明提供一种工程车辆,所述工程车辆包括驱动机构、刮板、传感器以及控制器,所述传感器设置于所述刮板第一接触点,所述驱动机构作用于所述刮板的第二接触点,待整形件对所述刮板的接触点为第三接触点,所述控制器与所述传感器以及所述驱动机构电连接,所述控制器用于执行如前述实施方式任一项所述的刮板保护控制方法。
34、本发明实施例提供的刮板保护控制方法及工程车辆的有益效果包括:通过获取第一作用力信息以及第二作用力信息以等效计算出第三作用力信息,即精确地获取了刮板在岩壁对其的受力处的受力信息,因此在计算得出刮板的最大受力信息的情况下,可通过控制驱动机构的输出力矩,避免第三作用力信息大于刮板的最大受力信息,从而避免了刮板因受力过大而损坏,有效地保护了刮板,显著提高了刮板的使用寿命。
技术特征:
1.一种刮板保护控制方法,其特征在于,所述刮板保护控制方法包括以下步骤:
2.根据权利要求1所述的刮板保护控制方法,其特征在于,所述刮板保护控制方法的步骤还包括:
3.根据权利要求1所述的刮板保护控制方法,其特征在于,所述刮板的最大受力信息通过有限元分析获取。
4.根据权利要求2所述的刮板保护控制方法,其特征在于,所述根据所述刮板的材料信息计算所述刮板的最大受力信息的步骤包括:
5.根据权利要求4所述的刮板保护控制方法,其特征在于,所述根据所述刮板的材料信息计算得出所述刮板的最大允许应力的步骤包括:
6.根据权利要求5所述的刮板保护控制方法,其特征在于,所述根据所述最大允许应力计算得出所述刮板的最大允许弯矩的步骤包括:
7.根据权利要求1所述的刮板保护控制方法,其特征在于,所述根据所述第一作用力信息和所述第二作用力信息等效计算出所述刮板在第三接触点的第三作用力信息的步骤包括:
8.根据权利要求1所述的刮板保护控制方法,其特征在于,所述将所述第三作用力信息与所述刮板的最大受力信息进行比对以得到比对信息,根据比对信息控制驱动机构工作的步骤包括:
9.根据权利要求8所述的刮板保护控制方法,其特征在于,所述在所述比对信息小于预设阈值的情况下,发出预警信号并控制所述驱动机构停止工作的步骤之后,所述刮板保护控制方法还包括:
10.一种工程车辆,其特征在于,所述工程车辆包括驱动机构、刮板、传感器以及控制器,所述传感器设置于所述刮板第一接触点,所述驱动机构作用于所述刮板的第二接触点,待整形件对所述刮板的接触点为第三接触点,所述控制器与所述传感器以及所述驱动机构电连接,所述控制器用于执行如权利要求1-9任一项所述的刮板保护控制方法。
技术总结
本发明提供了一种刮板保护控制方法及工程车辆,涉及工程设备技术领域。刮板保护控制方法包括以下步骤:获取表征第一接触点的第一作用力信息;获取表征第二接触点的第二作用力信息;根据第一作用力信息和第二作用力信息等效计算出刮板在第三接触点的第三作用力信息;将第三作用力信息与最大受力信息进行比对以得到比对信息,根据比对信息控制驱动机构工作。通过控制驱动机构的输出力矩,避免第三作用力信息大于刮板的最大受力信息,从而避免了刮板因受力过大而损坏,有效地保护了刮板,显著提高了刮板的使用寿命。
技术研发人员:冯怀,邱章令,何晓江,曾繁武,魏剑,兰冰
受保护的技术使用者:四川蓝海智能装备制造有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!