一种基于智能机械掘进隧道控制大变形数据监测方法
本发明属于隧道工程,具体地说是一种基于智能机械掘进隧道控制大变形数据监测方法。
背景技术:
1、隧道软岩大变形隧道施工难度非常大,且影响施工和安全的因素比较多,目前国内外在软岩大变形隧道施工中,大多采取先加固,再支护,最后开挖的方法。此种施工方法虽然也可以保证施工质量,但耗时长,成本高,经济效益不高,难以满足现代化隧道工程施工的要求。根据软岩大变形程度,选择合适的台阶开挖方法,可有效解决传统施工技术存在的弊端和不足,既能为隧道开挖施工营造一个安全稳定的平台,又能有比较高的施工效率,可按期完成施工任务,在保证施工质量和安全的基础上,获得更大的经济效益。
2、智能机械掘进隧道过程中是非常危险的,在掘进的过程中由于各种原因隧道的基层会产生一定的形变,当隧道形变数值超过安全范围后便会使施工现场处于严重危险的状态下,因此需要第一时间能够掌握隧道形变数值,从而可以提升隧道掘进时的安全性!
3、综上,因此本发明提供了一种基于智能机械掘进隧道控制大变形数据监测方法,以解决上述问题。
技术实现思路
1、为了解决上述技术问题,本发明提供一种基于智能机械掘进隧道控制大变形数据监测方法,以解决现有技术中智能机械掘进隧道过程中是非常危险的,在掘进的过程中由于各种原因隧道的基层会产生一定的形变,当隧道形变数值超过安全范围后便会使施工现场处于严重危险的状态下,因此需要第一时间能够掌握隧道形变数值,从而可以提升隧道掘进时的安全性问题。
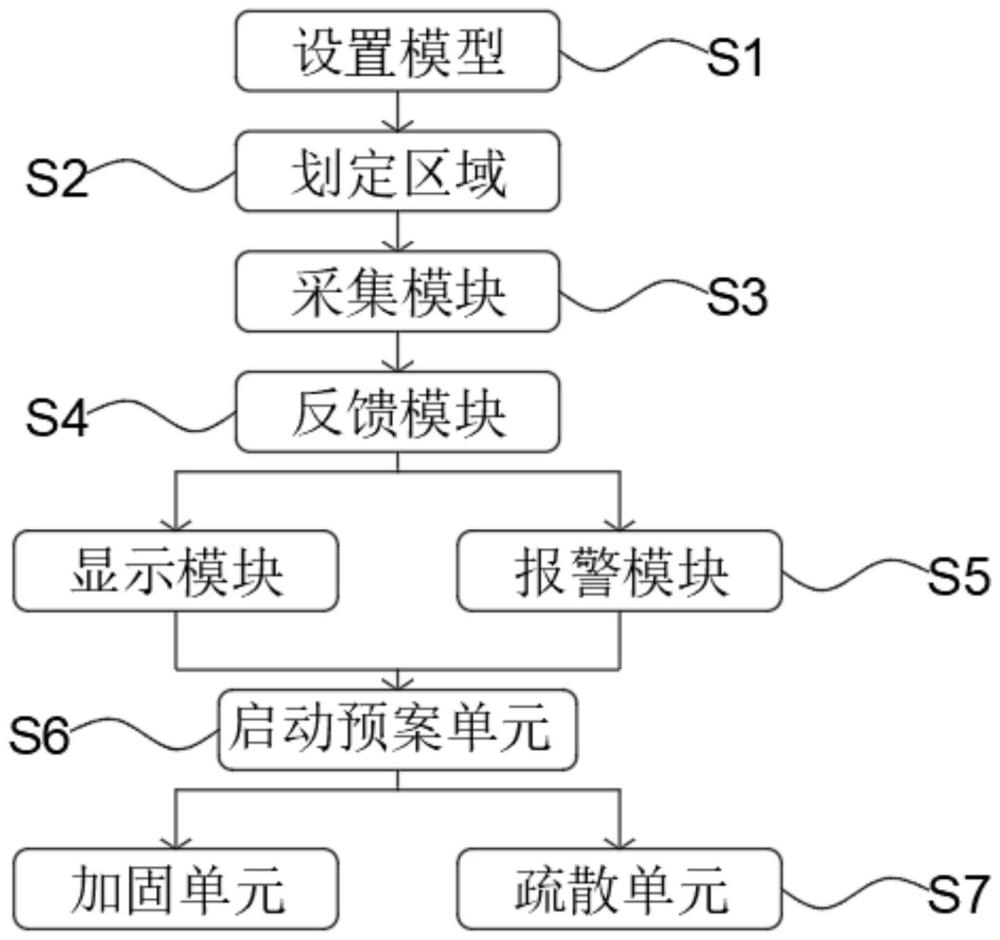
2、一种基于智能机械掘进隧道控制大变形数据监测方法,包括以下步骤:
3、第一步:设置模型,针对岩溶地区隧道建设过程中常见的岩性变化、非均匀地层、软弱夹层、溶洞4种岩性构造特征;
4、第二步:划定区域,在第一步的每种模型上划定一个为100m×200m的计算区域;
5、第三步:采集模块,在划定的区域上安装规定的尺寸安装上三维压力传感器;
6、第四步:反馈模块,采集模块安装完成后,将反馈模块通过无线或者有线与采集模块进行接入,使采集模块收集到的模型压力数据通过反馈模块传输至下一环节;
7、第五步:显示模块,显示模块将反馈模块传回的数据进行展示,并与安全数值进行对接,当反馈回来的数据大于安全数值时,显示模块便会启动报警模块,报警模块发出蜂鸣声,以告知相关人员;
8、第六步:启动预案,当相关人员接收到报警模块发出的警报后,相关人员会根据显示模块上的具体数值和显示地点启动应急预案;
9、第七步:加固单元,应急预案启动后,抢修人员会对危险点进行加固,加固同时,隧道内疏散单元的应急照明设备和应急指示设备会及时开启,以便于隧道内人员撤离。
10、优选的,所述设置模型的4种岩性构造特征具体为:层状介质模型、三层介质模型、横向非均匀模型和充填空洞模型。
11、优选的,所述层状介质模型可反映非均匀界面的波场传播,所述三层介质模型中间为低速带,反映隧道中软弱夹层中波场的传播特征,所述横向非均匀模型模拟波场在非均匀地层中的传播,所述充填空洞模型模拟岩溶地区溶洞充填软弱黏土时的波场传播特征。
12、优选的,所述划定区域的100m×200m计算区域,其中纵向(z轴)方向长100m,横向(轴)方向长200m。
13、优选的,所述划定区域的计算网格大小为1m,对应网格点数轴方向1~101,z轴方向1~201,时间步长为at=0.001s,采样时间点数t=2050。震源在时间函数形式上采用主频为f=50hz的ri ck子波来模拟波在不同介质中的传播。
14、优选的,所述采集模块中对于二维压力一速度全声波方程,采用高阶交错网络进行有限差分数值模拟,并采用吸收边界和加阻尼边界的方法。
15、优选的,所述反馈模块与显示模块之间采用有线进行对接,所述显示模块为联网液晶显示机,所述显示模块展示的内容包括:每个模型上的二维压力传感器的坐标位置、二维压力传感器采集的实时数值以及自动对数值进行对比。
16、优选的,所述报警模块为蜂鸣器,报警模块为蜂鸣器在模型区域内每10m安装一个,蜂鸣器之间采用并联方式接入显示模块。
17、优选的,所述加固单元在掘进作业中采用挖装机配合大吨位自卸汽车,自卸汽车无轨运输出渣。
18、与现有技术相比,本发明具有如下有益效果:
19、本发明通过在划定区域内设置好对应的模型,然后在划定区域内安装上采集模块,将采集模块当中的二维压力传感器与反馈模块接入,二维压力传感器使用时会实时采集划定区域内的压力值,然后会在显示模块上展示,显示模块将传递回来的数值与安全数值实时进行对比,当传递回来的数值超过安全值后,此时报警模块会触发警报,工作人员接收到警报信息后会启动应急预案,这样便能及时掌握掘进隧道内部大型变数据,从而提升隧道掘进时的安全性。
技术特征:
1.一种基于智能机械掘进隧道控制大变形数据监测方法,其特征在于,包括以下步骤:
2.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述设置模型的4种岩性构造特征具体为:层状介质模型、三层介质模型、横向非均匀模型和充填空洞模型。
3.如权利要求2所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述层状介质模型可反映非均匀界面的波场传播,所述三层介质模型中间为低速带,反映隧道中软弱夹层中波场的传播特征,所述横向非均匀模型模拟波场在非均匀地层中的传播,所述充填空洞模型模拟岩溶地区溶洞充填软弱黏土时的波场传播特征。
4.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述划定区域的100m×200m计算区域,其中纵向(z轴)方向长100m,横向(轴)方向长200m。
5.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述划定区域的计算网格大小为1m,对应网格点数轴方向1~101,z轴方向1~201,时间步长为at=0.001s,采样时间点数t=2050,震源在时间函数形式上采用主频为f=50hz的rick子波来模拟波在不同介质中的传播。
6.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述采集模块中对于三维压力一速度全声波方程,采用高阶交错网络进行有限差分数值模拟,并采用吸收边界和加阻尼边界的方法。
7.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述反馈模块与显示模块之间采用有线进行对接,所述显示模块为联网液晶显示机,所述显示模块展示的内容包括:每个模型上的三维压力传感器的坐标位置、三维压力传感器采集的实时数值以及自动对数值进行对比。
8.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述报警模块为蜂鸣器,报警模块为蜂鸣器在模型区域内每10m安装一个,蜂鸣器之间采用并联方式接入显示模块。
9.如权利要求1所述基于智能机械掘进隧道控制大变形数据监测方法,其特征在于:所述加固单元在掘进作业中采用挖装机配合大吨位自卸汽车,自卸汽车无轨运输出渣。
技术总结
本发明提供一种基于智能机械掘进隧道控制大变形数据监测方法,包括以下步骤:第一步:设置模型,针对岩溶地区隧道建设过程中常见的岩性变化、非均匀地层、软弱夹层、溶洞4种岩性构造特征;第二步:划定区域,在第一步的每种模型上划定一个计算区域;采集模块,在划定的区域上安装规定的尺寸安装上三维压力传感器;本发明通过在划定区域内设置好对应的模型,然后在划定区域内安装上采集模块,压力传感器使用时会实时采集划定区域内的压力值,显示模块将传递回来的数值与安全数值实时进行对比,当传递回来的数值超过安全值后,此时报警模块会触发警报,工作人员接收到警报信息后会启动应急预案,从而提升隧道掘进时的安全性。
技术研发人员:高军,林晓,罗红明,刘凯文,薛惠玲
受保护的技术使用者:中国科学院武汉岩土力学研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!