一种基于5G网络的无线控制掘进机及控制方法与流程
本发明涉及一种基于5g网络的无线控制掘进机及控制方法,属于煤矿开采设备。
背景技术:
1、煤矿井下具有掘进机、采煤机、单轨吊车、巡检机器人等典型的移动作业设备,采煤机、掘进机设备在进行作业时需将设备运行状态数据、环境数据、视频监控数据等大量数据传输至地面监控中心,因此现有的采煤机、掘进机长期接有双绞线进行移动作业,但有线线路长期在井下拖拽移动易将线路损坏,导致煤矿生产产生安全隐患,需要使用无线通讯系统替代有线网络进行数据传输。
2、实现煤矿智能化综采和智能化综掘均需要进行远程低时延控制,时延直接影响了设备远程控制的安全性,4g、wifi等无线通讯技术的时延标准无法满足低时延控制的要求,因此,需要低时延的5g无线通讯系统才能支撑智能化综掘和智能化综采的建设,达到工作面的减人增效的目标。
3、而掘进机作为煤矿井下开采的主要设备之一,仅建设低时延的5g无线通讯系统还不够,想要实现智能化综掘和智能化综采的建设,还要实现掘进机的基于5g网络的无线控制。
技术实现思路
1、本发明要解决的技术问题是:提供一种基于5g网络的无线控制掘进机及控制方法,以解决上述现有技术中存在的技术问题。
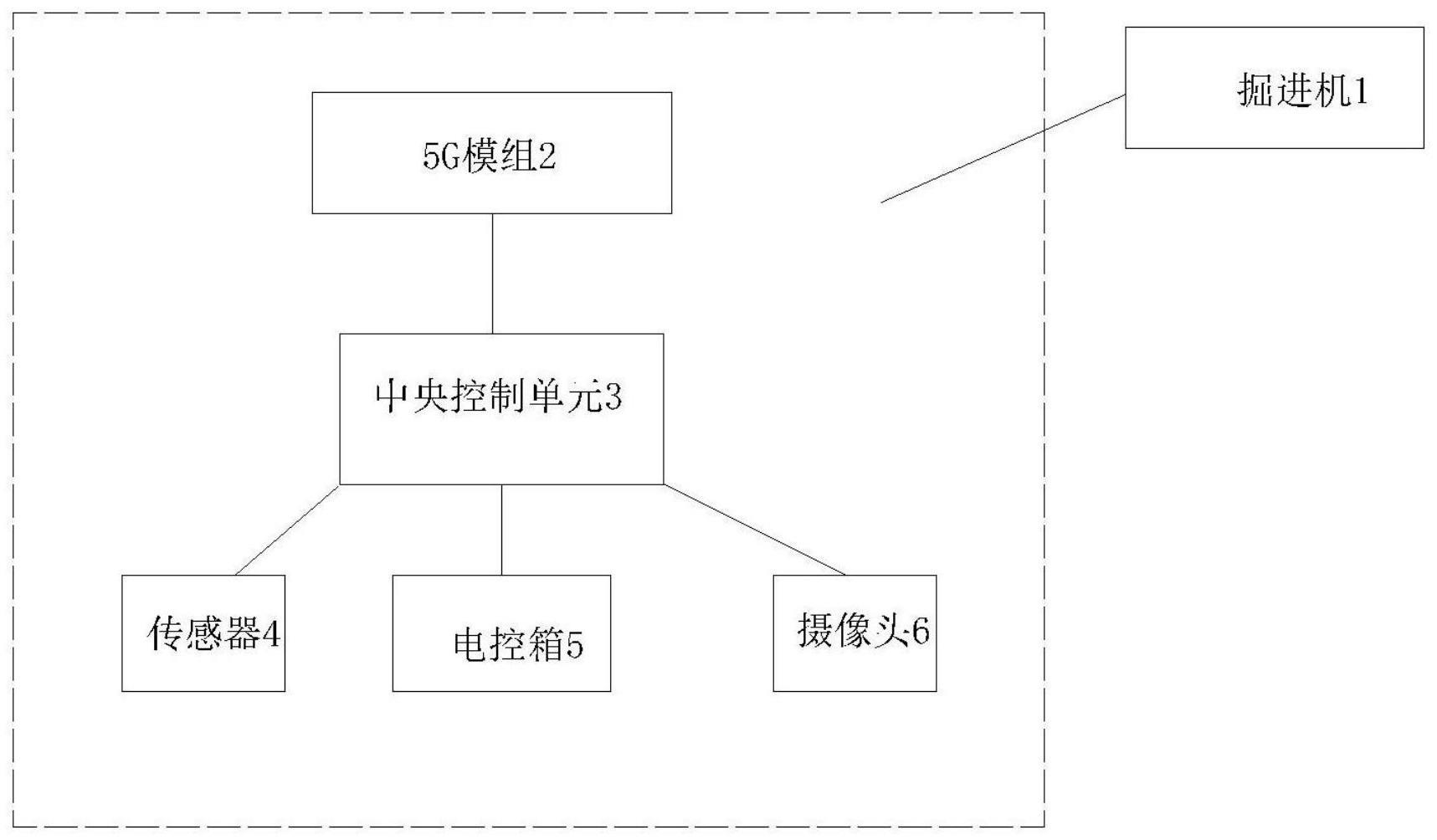
2、本发明采取的技术方案为:一种基于5g网络的无线控制掘进机,包括掘进机,所述掘进机上安装有传感器、电控箱以及5g模组,所述5g模组通过中央控制单元与掘进机上的传感器以及电控箱电性连接;所述掘进机上的5g模组用于与掘进机上位机进行通讯。
3、优选的,所述掘进机上安装有网络摄像头,所述5g模组通过中央控制单元与所述网络摄像头电性连接。
4、优选的,所述5g模组包括电话卡槽和网口,所述网口与掘进机的传感器、电控箱电性连接;所述电话卡槽用于安装电话卡,所述电话卡通过5g网络与掘进机上位机通讯。
5、优选的,还包括摄像头自动除尘结构,所述摄像头自动除尘结构包括海绵和驱动机构海绵的轴线沿竖直方向布置,海绵位于摄像头的镜头的前端,海绵在驱动机构的驱动下能上下运动。
6、优选的,所述驱动机构为气缸,气缸固定在机架上。
7、优选的,所述海绵的上端同轴固定连接有螺纹杆,机架上固定有固定筒,固定筒与螺纹杆同轴设置,固定筒中央的圆孔的直径大于螺纹杆和海绵的直径;固定筒侧壁上设置有进水主管,进水主管上连接有进水支管,进水支管沿固定筒的径向设置,进水支管贯穿固定筒的侧壁,进水支管上设置有第一单向进口阀,固定筒的远离进水支管的侧壁上设置有沿固定筒的径向布置的排水管,固定筒的下端设置有能将固定筒的下端封闭的自动阀,自动阀打开的时候允许螺纹杆和海绵通过;气缸固定在机架上,气缸的伸缩臂竖直朝下布置,气缸的伸缩臂的下端与螺纹杆转动连接,气缸的伸缩臂的外周设置有缸体,缸体固定在机架上,缸体的下端开口,气缸的伸缩臂贯穿缸体的上底和下底,且气缸的伸缩臂与缸体的上底滑动密封连接,气缸的伸缩臂上固定有滑板,滑板与缸体滑动密封连接,缸体的上端设置有第二单向进口阀和单向出口阀,单向出口阀与进水主管连接,单向出口阀连接有水源;缸体的下方同轴固定有固定环,固定环上设置有与螺纹杆上的外螺纹配合的内螺纹,且内外螺纹不自锁,当螺纹杆与固定环配合且向上运动的时候,螺纹杆正转,当螺纹杆与固定环配合且向下运动的时候,螺纹杆反转。
8、优选的,所述水源包括固定在所述缸体的右侧壁上的储水箱,第二单向进口阀通过吸水管与储水箱内下部连接。
9、本发明还包括一种基于5g网络的无线控制掘进机的控制方法,通过掘进机上位机设置巷道断面参数,掘进机上位机远程向掘进机发送命令,掘进机根据已经设置的巷道参数自动切割形成巷道。
10、优选的,所述掘进机上的传感器对巷道的参数进行采集,掘进机上位机收集掘进机上的传感器参数,实时监测掘进机的系统参数及运行状态。
11、优选的,所述掘进机的控制方式还包括集中控制、单独控制一部分以及自动运行三种方式。
12、本发明的有益效果:
13、1.与现有技术相比,本发明实施例1中,基于5g网络对井下掘进机的远程控制,基于5g网络实现地面中心对掘进机的启停控制和远程作业操作,时延不超过50ms,能满足掘进机远程控制的安全需要,实现掘进面少人化。
14、2.与实施例1相比,本发明实施例2中,本实施例中可以实现摄像头的自动擦拭,并且能实现海绵的自动清洗和脱水,从而实现本摄像头自动除尘结构的持续性除尘。
技术特征:
1.一种基于5g网络的无线控制掘进机,其特征在于:包括掘进机,所述掘进机上安装有传感器、电控箱以及5g模组,所述5g模组通过中央控制单元与掘进机上的传感器以及电控箱电性连接;所述掘进机上的5g模组用于与掘进机上位机进行通讯。
2.根据权利要求1所述的一种基于5g网络的无线控制掘进机,其特征在于:所述掘进机上安装有网络摄像头,所述5g模组通过中央控制单元与所述网络摄像头电性连接。
3.根据权利要求1所述的一种基于5g网络的无线控制掘进机,其特征在于:所述5g模组包括电话卡槽和网口,所述网口与掘进机的传感器、电控箱电性连接;所述电话卡槽用于安装电话卡,所述电话卡通过5g网络与掘进机上位机通讯。
4.根据权利要求2所述的一种基于5g网络的无线控制掘进机,其特征在于:还包括摄像头自动除尘结构,所述摄像头自动除尘结构包括海绵和驱动机构海绵的轴线沿竖直方向布置,海绵位于摄像头的镜头的前端,海绵在驱动机构的驱动下能上下运动。
5.根据权利要求4所述的一种基于5g网络的无线控制掘进机,其特征在于:所述驱动机构为气缸,气缸固定在机架上。
6.根据权利要求5所述的一种基于5g网络的无线控制掘进机,其特征在于:所述海绵的上端同轴固定连接有螺纹杆,机架上固定有固定筒,固定筒与螺纹杆同轴设置,固定筒中央的圆孔的直径大于螺纹杆和海绵的直径;固定筒侧壁上设置有进水主管,进水主管上连接有进水支管,进水支管沿固定筒的径向设置,进水支管贯穿固定筒的侧壁,进水支管上设置有第一单向进口阀,固定筒的远离进水支管的侧壁上设置有沿固定筒的径向布置的排水管,固定筒的下端设置有能将固定筒的下端封闭的自动阀,自动阀打开的时候允许螺纹杆和海绵通过;气缸固定在机架上,气缸的伸缩臂竖直朝下布置,气缸的伸缩臂的下端与螺纹杆转动连接,气缸的伸缩臂的外周设置有缸体,缸体固定在机架上,缸体的下端开口,气缸的伸缩臂贯穿缸体的上底和下底,且气缸的伸缩臂与缸体的上底滑动密封连接,气缸的伸缩臂上固定有滑板,滑板与缸体滑动密封连接,缸体的上端设置有第二单向进口阀和单向出口阀,单向出口阀与进水主管连接,单向出口阀连接有水源;缸体的下方同轴固定有固定环,固定环上设置有与螺纹杆上的外螺纹配合的内螺纹,且内外螺纹不自锁,当螺纹杆与固定环配合且向上运动的时候,螺纹杆正转,当螺纹杆与固定环配合且向下运动的时候,螺纹杆反转。
7.根据权利要求6所述的一种基于5g网络的无线控制掘进机,其特征在于:所述水源包括固定在所述缸体的右侧壁上的储水箱,第二单向进口阀通过吸水管与储水箱内下部连接。
8.根据权利要求1-7任一项所述的一种基于5g网络的无线控制掘进机的控制方法,其特征在于:通过掘进机上位机设置巷道断面参数,掘进机上位机远程向掘进机发送命令,掘进机根据已经设置的巷道参数自动切割形成巷道。
9.根据权利要求8所述的一种基于5g网络的无线控制掘进机的控制方法,其特征在于:所述掘进机上的传感器对巷道的参数进行采集,掘进机上位机收集掘进机上的传感器参数,实时监测掘进机的系统参数及运行状态。
10.根据权利要求8所述的一种基于5g网络的无线控制掘进机的控制方法,其特征在于:所述掘进机的控制方式还包括集中控制、单独控制一部分以及自动运行三种方式。
技术总结
本发明公开了一种基于5G网络的无线控制掘进机,包括掘进机,所述掘进机上安装有传感器、电控箱以及5G模组,所述5G模组通过中央控制单元与掘进机上的传感器以及电控箱电性连接;所述掘进机上的5G模组用于与掘进机上位机进行;本发明还公开了一种基于5G网络的无线控制掘进机的控制方法。本发明基于5G网络对井下掘进机的远程控制,基于5G网络实现地面中心对掘进机的启停控制和远程作业操作,时延不超过50ms,能满足掘进机远程控制的安全需要,实现掘进面少人化。
技术研发人员:崔光翔,敖成龙,胡刚,敖强,张斌斌
受保护的技术使用者:贵州盘江精煤股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!