一种旋挖钻孔机高精度孔口定位装置及定位方法与流程
本发明属于建筑施工,尤其涉及一种旋挖钻孔机高精度孔口定位装置及定位方法。
背景技术:
1、旋挖灌注桩是目前工程中最常用的桩基础形式之一,进行旋挖钻进前需要提前定位孔口点位,因此孔口定位的精确度将直接影响后续旋挖成孔的质量和精度。特别对于大孔径桩,在旋挖钻进前孔口的定位误差大,不易精准控制钻头中心,容易偏离目标孔心,因此在进行旋挖钻进前对孔口进行精确定位尤其关键。
2、目前,灌注桩在施工时一般采用常规的十字定位法,通过目测使钻头对准交叉点来定位孔口位置,难以进行定量控制,也无法实时获取误差情况,而已有的相关发明多关注于灌注桩在成孔过程中的垂直度和精度控制,忽略了旋挖钻进前进行孔口高精度定位这一关键施工步骤。因此,亟待开发一种能够进行孔口高精度定位的孔口定位装置以及相应的施工方法。
3、例如,专利:一种路桥施工灌注桩钻孔机孔口定位装置及施工方法(202011113309.3),其装置过于复杂;专利:一种永临结合格构柱精确定位施工方法(202110325156.7),其关注于成桩过程中桩孔垂直度,忽略了孔口初始定位精度的控制;专利:一种路桥施工灌注桩钻孔机孔口定位装置及施工方法(202210405086.0),其装置和方法虽易于操作,但定位精度不足。
技术实现思路
1、本发明的目的在于:为了克服现有技术问题,公开了一种旋挖钻孔机高精度孔口定位装置及定位方法,通过本发明定位装置和/或定位方法,实现了旋挖钻孔机的钻孔与钻孔间的高精度定位,提升了工程施工质量。
2、一方面,本发明目的通过下述技术方案来实现:
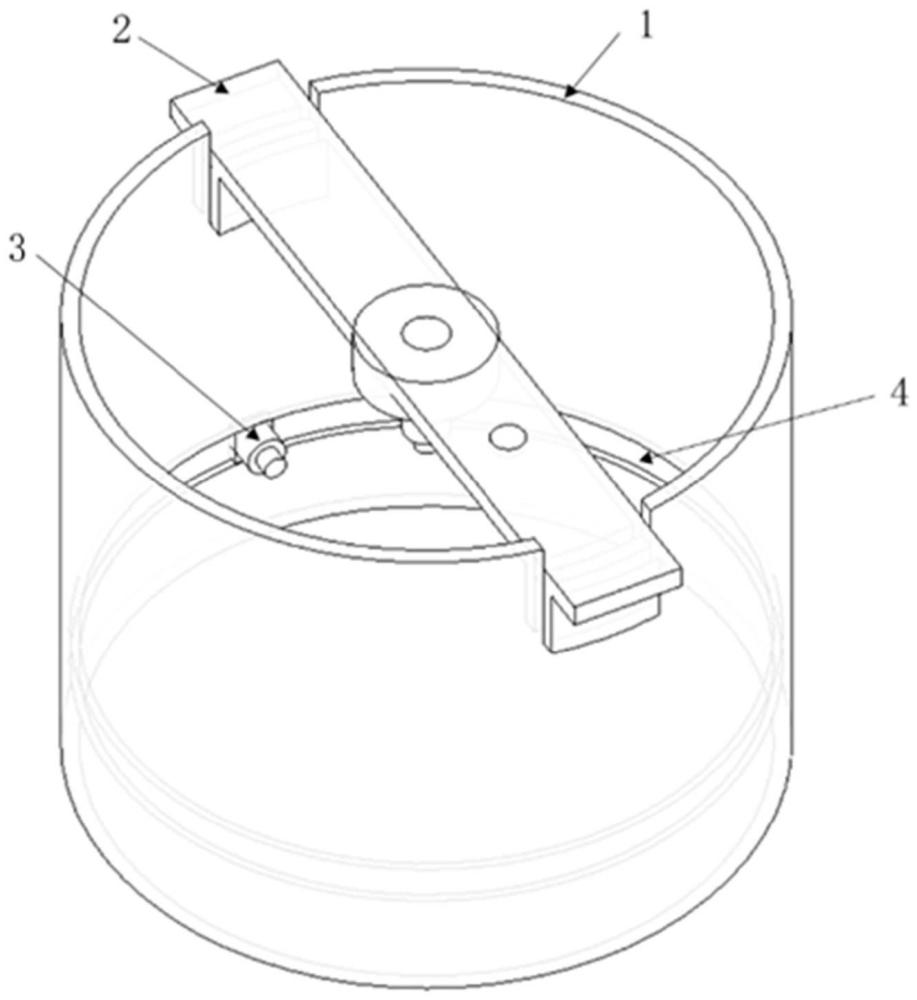
3、一种旋挖钻孔机高精度孔口定位装置,所述孔口定位装置包括:钢护筒、定位卡尺、激光扫描仪、扫描轨道和数据处理单元;
4、所述定位卡尺可拆卸的固定于所述钢护筒的顶部,且所述定位卡尺的中部设有激光定位仪,所述激光定位仪射出的激光线与钢护筒的轴心线重合;
5、所述扫描轨道为环形结构,并水平固定设置于所述钢护筒内侧壁之上,所述激光扫描仪活动设置于所述扫描轨道上,并朝向于扫描轨道的圆心设置,用于完成和目标间的距离信息扫描;
6、当旋挖钻孔机的钻头伸入钢护筒内时,由激光扫描仪完成其相对于钢护筒的位置偏差扫描,并将扫描数据发送至数据处理单元,所述数据处理单元基于接受到的扫描数据完成钻头实测位置成图,并提取钻头实测位置轮廓与钻头目标位置轮廓的偏差面积δa和偏移主方向夹角θ;
7、从而,基于偏差面积δa获得面积偏差率ra,并基于面积偏差率ra和偏移主方向夹角θ完成旋挖钻孔机的钻头位置调整,直至面积偏差率ra小于阈值时结束钻头水平位置调整。
8、根据一个优选的实施方式,所述面积偏差率ra通过下式计算获得:
9、
10、式中,ra表示面积偏差率,δa表示钻头实测位置轮廓和目标位置轮廓之间的面积差,r表示钻头半径。
11、根据一个优选的实施方式,所述激光扫描仪还射出竖向的激光线,当旋挖钻孔机的钻头伸入钢护筒内时首先基于激光扫描仪射出的竖向激光线完成钻头的竖直位置调整,然后再进行水平位置调整。
12、根据一个优选的实施方式,所述扫描轨道的截面为t型槽状结构,且槽体朝向于钢护筒圆心设置。
13、根据一个优选的实施方式,所述激光扫描仪包括激光扫描发射器和动力滚轮,所述动力滚轮设置于激光扫描发射器的底部;所述激光扫描发射器内嵌于扫描轨道中,并通过动力滚轮提供动力,实现在扫描轨道中的自由滑动。
14、根据一个优选的实施方式,所述定位卡尺主体部两端设有卡接结构,所述卡接结构包括护筒外侧定位片和护筒内侧定位片;
15、所述护筒外侧定位片和护筒内侧定位片平行固定于主体部两端,且护筒外侧定位片和护筒内侧定位片之间的间隙距离等于所述钢护筒侧壁厚度。
16、根据一个优选的实施方式,所述护筒外侧定位片和护筒内侧定位片为弧形板状结构。
17、根据一个优选的实施方式,所述激光定位仪经辅助定位盘固定于定位卡尺主体部的底侧,所述定位卡尺的主体部为板状结构的定位板。
18、根据一个优选的实施方式,所述定位卡尺主体部顶端还设有圆形水准泡。
19、另一方面,本发明还公开了:
20、一种旋挖钻孔机高精度孔口定位方法,所述孔口定位方法包括如下步骤:
21、s1:放置前述孔口定位装置,使孔口定位装置的钢护筒的中心与旋挖钻孔机的钻头目标孔心重合或小于预设误差值;
22、s2:初步放入旋挖钻孔机的钻头;
23、在钢护筒中初步放置钻头,然后启动钢护筒筒壁上扫描轨道上布设的激光扫描仪,绕扫描轨道运动扫掠一周,实测钢护筒与钻头外轮廓之间的距离,从而确定钻头的实际位置;
24、s3:调整钻头点位;
25、数据处理单元基于接受到的扫描数据完成钻头实测位置成图,并提取钻头实测位置轮廓与钻头目标位置轮廓的偏差面积δa和偏移主方向夹角θ;
26、从而,基于偏差面积δa获得面积偏差率ra,并基于面积偏差率ra和偏移主方向夹角θ完成旋挖钻孔机的钻头位置调整,直至面积偏差率ra小于阈值时结束钻头水平位置调整。
27、前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
28、本发明的有益效果:
29、通过本发明孔口定位装置的结构设置,可在不增加施工成本的情况下,有效提高钻进前钻头孔口定位的精度;同时该装置具有结构简单、使用方便,易于拆卸和维护,并且可以重复使用的特点。
30、本发明孔口定位方法结合孔口定位装置,可以快速高效地调整钻头的位置,显著提高孔口定位的精度。
技术特征:
1.一种旋挖钻孔机高精度孔口定位装置,其特征在于,所述孔口定位装置包括:钢护筒(1)、定位卡尺(2)、激光扫描仪(3)、扫描轨道(4)和数据处理单元;
2.如权利要求1所述的孔口定位装置,其特征在于,所述面积偏差率ra通过下式计算获得:
3.如权利要求1所述的孔口定位装置,其特征在于,所述激光扫描仪(3)还射出竖向的激光线,当旋挖钻孔机的钻头伸入钢护筒(1)内时首先基于激光扫描仪(3)射出的竖向激光线完成钻头的竖直位置调整,然后再进行水平位置调整。
4.如权利要求1所述的孔口定位装置,其特征在于,所述扫描轨道(4)的截面为t型槽状结构,且槽体朝向于钢护筒(1)圆心设置。
5.如权利要求4所述的孔口定位装置,其特征在于,所述激光扫描仪(3)包括激光扫描发射器(31)和动力滚轮(32),所述动力滚轮(32)设置于激光扫描发射器(31)的底部;
6.如权利要求1所述的孔口定位装置,其特征在于,所述定位卡尺(2)主体部两端设有卡接结构,所述卡接结构包括护筒外侧定位片(21)和护筒内侧定位片(22);
7.如权利要求6所述的孔口定位装置,其特征在于,所述护筒外侧定位片(21)和护筒内侧定位片(22)为弧形板状结构。
8.如权利要求1所述的孔口定位装置,其特征在于,所述激光定位仪(25)经辅助定位盘(24)固定于定位卡尺(2)主体部的底侧,所述定位卡尺(2)的主体部为板状结构的定位板(23)。
9.如权利要求1所述的孔口定位装置,其特征在于,所述定位卡尺(2)主体部顶端还设有圆形水准泡(26)。
10.一种旋挖钻孔机高精度孔口定位方法,其特征在于,所述孔口定位方法包括如下步骤:
技术总结
本发明公开了一种旋挖钻孔机高精度孔口定位装置及定位方法,所述孔口定位装置包括:钢护筒、定位卡尺、激光扫描仪、扫描轨道和数据处理单元;当旋挖钻孔机的钻头伸入钢护筒内时,由激光扫描仪完成其相对于钢护筒的位置偏差扫描,并将扫描数据发送至数据处理单元,数据处理单元基于接受到的扫描数据完成钻头实测位置成图,并提取钻头实测位置轮廓与钻头目标位置轮廓的偏差面积ΔA和偏移主方向夹角θ;从而,基于偏差面积ΔA获得面积偏差率RA,并基于面积偏差率RA和偏移主方向夹角θ完成旋挖钻孔机的钻头位置调整,直至面积偏差率RA小于阈值时结束钻头水平位置调整。本发明定位装置和/或定位方法,实现了旋挖钻孔机的钻孔与钻孔间的高精度定位。
技术研发人员:陈科旭,惠峰,杨林,李建虎,梁昊,朱正刚,张志伟
受保护的技术使用者:中国五冶集团有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!