一种地铁隧道钢环片安装方法、设备及存储介质与流程
本发明涉及隧道施工,尤其涉及一种地铁隧道钢环片安装方法、设备及存储介质。
背景技术:
1、在运营隧道的施工过程中,钢环片作为隧道结构的关键组成部分,承担着增强隧道抗压能力和防止地下水渗透的重要功能,因此安装钢环片是用于加固隧道结构并保证其稳定性的关键步骤。现有技术中,常常使用机械臂实现对钢环片的抓举与放置的过程以完成安装钢环片的步骤,然而,在正常施工过程中,需要频繁调整机械臂的大臂与小臂的旋转角度以实现控制机械臂抓取钢环片并安装至对应的安装位置,使得需要操作人员频繁调整机械臂的大臂与小臂的角度,极大地增加了施工过程中的操作量,施工效率偏低。
技术实现思路
1、本发明的主要目的在于提供了一种地铁隧道钢环片安装方法、设备及存储介质,旨在解决现有技术中如何减少安装钢环片步骤的操作量,提升施工效率的技术问题。
2、为实现上述目的,本发明实施例提供了一种地铁隧道钢环片安装方法,应用于横截面为圆形且以地面为弦的施工隧道,所述地铁隧道钢环片安装方法的步骤包括:
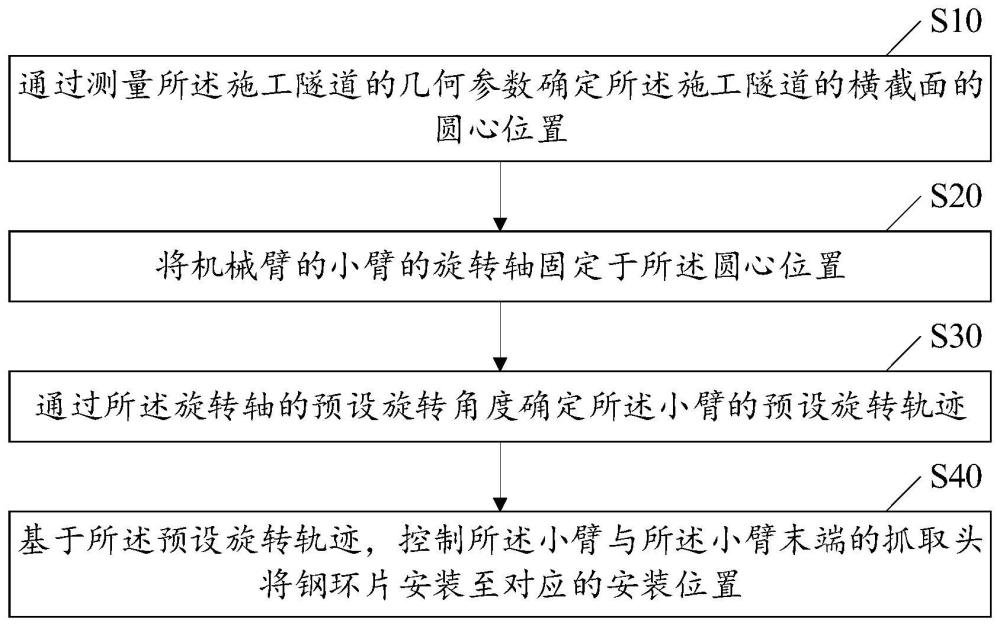
3、通过测量所述施工隧道的几何参数确定所述施工隧道的横截面的圆心位置;
4、将机械臂的小臂的旋转轴固定于所述圆心位置;
5、通过所述旋转轴的预设旋转角度确定所述小臂的预设旋转轨迹;
6、基于所述预设旋转轨迹,控制所述小臂与所述小臂末端的抓取头将钢环片安装至对应的安装位置。
7、可选地,所述施工隧道的几何参数包括所述施工隧道的隧道高度以及所述施工隧道的隧道直径;
8、所述通过测量所述施工隧道的几何参数确定所述施工隧道的横截面的圆心位置的步骤包括:
9、基于所述钢环片的安装位置,确定所述施工隧道的待施工段在地面上的矩形投影,并获取所述矩形投影的几何中心;
10、基于所述矩形投影的几何中心,确定处于所述施工隧道的横截面上的圆弧;
11、通过测量所述圆弧上任意两点之间的最大距离,获取所述施工隧道的隧道直径;
12、通过测量所述矩形投影的几何中心至所述施工隧道的顶部的距离,获取所述施工隧道的隧道高度;
13、基于所述隧道高度、所述隧道直径以及所述矩形投影的几何中心确定所述圆心位置。
14、可选地,所述基于所述隧道高度、所述隧道直径以及所述矩形投影的几何中心确定所述圆心位置的步骤包括:
15、通过所述隧道直径计算出所述施工隧道的隧道半径;
16、基于所述隧道半径以及所述隧道高度,计算出所述圆心位置至地面的距离;
17、基于所述圆心位置至地面的距离,在所述矩形投影的几何中心上方确定所述圆心位置。
18、可选地,所述机械臂的大臂通过所述旋转轴与所述小臂连接;
19、所述将所述机械臂的小臂的旋转轴固定于所述圆心位置的步骤包括:
20、将所述机械臂移动至所述矩形投影上方;
21、调整所述机械臂的大臂的长度以及角度,使所述旋转轴移动至所述圆心位置。
22、可选地,所述基于所述预设旋转轨迹,控制所述小臂与所述小臂末端的抓取头将钢环片安装至对应的安装位置的步骤包括:
23、基于所述预设旋转轨迹,控制所述小臂运行至所述安装位置;
24、调整所述小臂的长度,将所述抓取头抓取的钢环片固定至所述安装位置。
25、可选地,所述调整所述小臂的长度,将所述抓取头抓取的钢环片固定至所述安装位置的步骤之前,还包括:
26、检测所述小臂的实际旋转轨迹是否与所述预设旋转轨迹重合;
27、在检测到所述实际旋转轨迹与所述预设旋转轨迹不重合时,停止执行后续步骤并进行报警。
28、可选地,所述通过所述旋转轴的预设旋转角度确定所述小臂的预设旋转轨迹的步骤之前,还包括:
29、通过所述钢环片的大小与形状,确认所述旋转轴的预设旋转角度。
30、此外,为实现上述目的,本发明实施例还提出一种地铁隧道钢环片安装设备,所述地铁隧道钢环片安装设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的地铁隧道钢环片安装程序,所述地铁隧道钢环片安装程序配置为实现如上文所述的地铁隧道钢环片安装方法的步骤。
31、此外,为实现上述目的,本发明实施例还提出一种存储介质,所述存储介质上存储有地铁隧道钢环片安装程序,所述地铁隧道钢环片安装程序被处理器执行时实现如上文所述的地铁隧道钢环片安装方法的步骤。
32、本发明实施例提出一种地铁隧道钢环片安装方法、设备及存储介质,所述地铁隧道钢环片安装方法的步骤包括:通过测量所述施工隧道的几何参数确定所述施工隧道的横截面的圆心位置;将机械臂的小臂的旋转轴固定于所述圆心位置;通过所述旋转轴的预设旋转角度确定所述小臂的预设旋转轨迹;基于所述预设旋转轨迹,控制所述小臂与所述小臂末端的抓取头将钢环片安装至对应的安装位置。本技术方案通过将机械臂上连接小臂的旋转轴固定在施工隧道的圆心位置,仅改变旋转轴的旋转角度就可实现控制小臂按照预设旋转轨迹运动,并与小臂末端的抓取头进行联动将钢环片安装至对应的安装位置,无需反复调整机械臂的大臂的转动角度,减少施工操作量,提升了施工效率。
技术特征:
1.一种地铁隧道钢环片安装方法,其特征在于,应用于横截面为圆形且以地面为弦的施工隧道,所述地铁隧道钢环片安装方法的步骤包括:
2.如权利要求1所述的地铁隧道钢环片安装方法,其特征在于,所述施工隧道的几何参数包括所述施工隧道的隧道高度以及所述施工隧道的隧道直径;
3.如权利要求2所述的地铁隧道钢环片安装方法,其特征在于,所述基于所述隧道高度、所述隧道直径以及所述矩形投影的几何中心确定所述圆心位置的步骤包括:
4.如权利要求3所述的地铁隧道钢环片安装方法,其特征在于,所述机械臂的大臂通过所述旋转轴与所述小臂连接;
5.如权利要求1所述的地铁隧道钢环片安装方法,其特征在于,所述基于所述预设旋转轨迹,控制所述小臂与所述小臂末端的抓取头将钢环片安装至对应的安装位置的步骤包括:
6.如权利要求5所述的地铁隧道钢环片安装方法,其特征在于,所述调整所述小臂的长度,将所述抓取头抓取的钢环片固定至所述安装位置的步骤之前,还包括:
7.如权利要求5所述的地铁隧道钢环片安装方法,其特征在于,所述基于所述预设旋转轨迹,控制所述小臂运行至所述预设安装位置的步骤之前,还包括:
8.如权利要求1所述的地铁隧道钢环片安装方法,其特征在于,所述通过所述旋转轴的预设旋转角度确定所述小臂的预设旋转轨迹的步骤之前,还包括:
9.一种地铁隧道钢环片安装设备,其特征在于,所述地铁隧道钢环片安装设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的地铁隧道钢环片安装程序,所述地铁隧道钢环片安装程序配置为实现如权利要求1至8中任一项所述的地铁隧道钢环片安装方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有地铁隧道钢环片安装程序,所述地铁隧道钢环片安装程序被处理器执行时实现如权利要求1至8任一项所述的地铁隧道钢环片安装方法的步骤。
技术总结
本发明提出一种地铁隧道钢环片安装方法、设备及存储介质,涉及隧道施工技术领域,地铁隧道钢环片安装方法的步骤包括:通过测量施工隧道的几何参数确定施工隧道的横截面的圆心位置;将机械臂的小臂的旋转轴固定于圆心位置;通过旋转轴的预设旋转角度确定小臂的预设旋转轨迹;基于预设旋转轨迹,控制小臂与小臂末端的抓取头将钢环片安装至对应的安装位置。本技术方案通过将机械臂上连接小臂的旋转轴固定在施工隧道的圆心位置,仅改变旋转轴的旋转角度就可实现控制小臂按照预设旋转轨迹运动,并与小臂末端的抓取头进行联动将钢环片安装至对应的安装位置,无需反复调整机械臂的大臂的转动角度,减少施工操作量,提升了施工效率。
技术研发人员:万勇,吴志华,宋立,黄飞宇,李慎涛,汤豪,余梦婷,李雅琴,陈慧
受保护的技术使用者:武汉精隧科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!