一种用于全地形机器人的辅助下井装置的制作方法
本技术属于机器人,尤其涉及一种用于全地形机器人的辅助下井装置。
背景技术:
1、机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械,狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。
2、本实用设计了一种用于全地形机器人的辅助下井装置,在井道的施工过程中,需要用到一种全地形机器人下到井中观察情况,传统的方式都是将机器人悬挂一根吊绳进行下井,但是在井中容易碰到井壁,从而对机器人造成磨损,因此为了降低全地形机器人在下井过程中造成的损坏,本实用提供了一种用于全地形机器人下井装置,完美解决了传统使用安全绳悬吊方式造成全地形机器人发生碰撞的缺点,且本实用可在不同类型的圆井或方井重复使用、实用性强,可大大提高井道施工效率。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供了一种用于全地形机器人的辅助下井装置,具备防止机器人在下井时发生磕碰、适用于圆井和方井使用、实用性强的优点,解决了现有的机器人在下井时都是通过吊绳进行悬挂下井、容易造成磨损的问题。
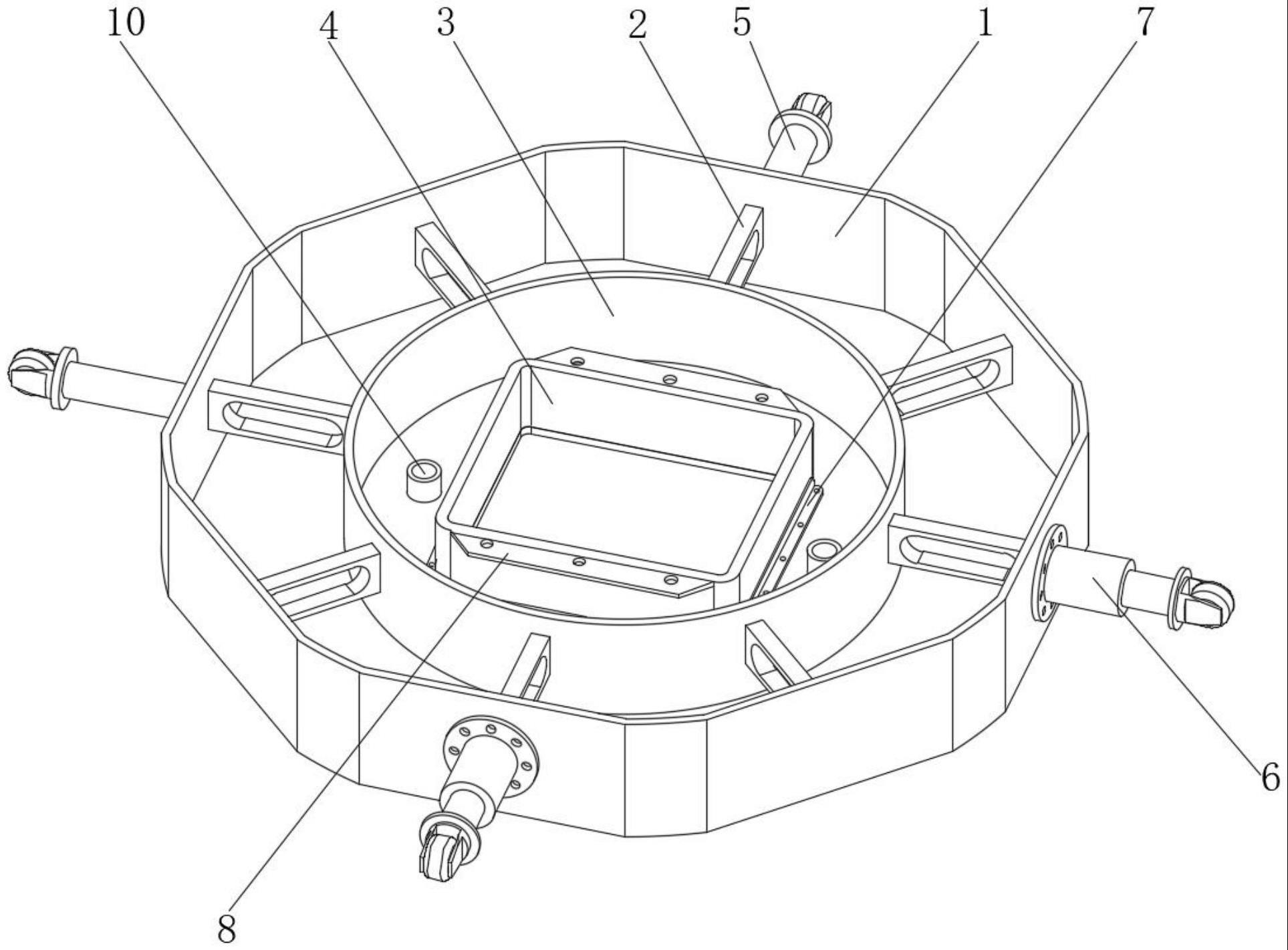
2、本实用新型是这样实现的,一种用于全地形机器人的辅助下井装置,包括防护壳,所述防护壳为八边形,所述防护壳的内腔设置有八个连接杆,八个连接杆相对的一侧之间固定连接有定位壳,所述定位壳内腔的底部连通有安装壳,所述防护壳的左侧和后侧均固定连接有限位杆,所述防护壳的前侧和右侧均固定连接有防晃组件。
3、作为本实用新型优选的,所述防晃组件包括活动壳,所述活动壳靠近防护壳的一侧与防护壳固定连接,所述活动壳内腔靠近防护壳的一侧固定连接有弹簧,所述弹簧远离防护壳的一侧固定连接有连接板,所述连接板远离防护壳的一侧固定连接有调节杆,所述调节杆和限位杆远离防护壳的一侧均固定连接有滑轮。
4、作为本实用新型优选的,所述活动壳的表面套设有加固环,所述加固环靠近防护壳的一侧与防护壳固定连接。
5、作为本实用新型优选的,所述活动壳内腔靠近防护壳的一侧均固定连接有两个滑杆,两个滑杆的表面之间与连接板活动连接。
6、作为本实用新型优选的,所述安装壳两侧的底部均固定连接有加固板,所述加固板的底部与定位壳内腔的底部固定连接。
7、作为本实用新型优选的,所述安装壳前侧和后侧的顶部均固定连接有安装板,所述安装板的表面开设有安装孔。
8、作为本实用新型优选的,所述定位壳内腔底部的两侧均连通有限位套,所述限位套的材质为塑料。
9、与现有技术相比,本实用新型的有益效果如下:
10、1、本实用新型通过设置防护壳、连接杆、定位壳、安装壳、限位杆和防晃组件的配合使用,解决了现有的机器人在下井时都是通过吊绳进行悬挂下井、容易造成磨损的问题。
11、2、本实用新型通过设置活动壳、弹簧、连接板、调节杆和滑轮的配合使用,当工作人员需要使用机器人进入井中勘测情况时,首先将机器人放置在安装壳的内部,随后通过定位组件将机器人配合安装板和安装孔进行定位,随后工作人员再将两个限位套的内部穿插伸缩,以此来使机器人下降,此时工作人员再将防护壳放置在井中,由于防护壳的形状为八边形,因此圆形井口和方形井口都可以使用,当防护壳放置在井中时,此时弹簧将收缩,使连接板带动调节杆向外挤压,随后滑轮将与井壁接触,以此来起到防止晃动的作用,通过设置加固环,加固环与防护壳固定连接,起到了对活动壳的定位作用,通过设置滑杆,起到了对连接板进行限位的作用。
12、3、本实用新型通过设置加固板,加固板与定位壳内腔的底部固定连接,起到了对安装壳的加固作用,通过设置安装板和安装孔的配合使用,起到了便于工作人员将机器人进行定位的作用,通过设置限位套,起到了辅助绳索滑动的作用。
技术特征:
1.一种用于全地形机器人的辅助下井装置,包括防护壳(1),其特征在于:所述防护壳(1)为八边形,所述防护壳(1)的内腔设置有八个连接杆(2),八个连接杆(2)相对的一侧之间固定连接有定位壳(3),所述定位壳(3)内腔的底部连通有安装壳(4),所述防护壳(1)的左侧和后侧均固定连接有限位杆(5),所述防护壳(1)的前侧和右侧均固定连接有防晃组件(6)。
2.如权利要求1所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述防晃组件(6)包括活动壳(601),所述活动壳(601)靠近防护壳(1)的一侧与防护壳(1)固定连接,所述活动壳(601)内腔靠近防护壳(1)的一侧固定连接有弹簧(602),所述弹簧(602)远离防护壳(1)的一侧固定连接有连接板(603),所述连接板(603)远离防护壳(1)的一侧固定连接有调节杆(604),所述调节杆(604)和限位杆(5)远离防护壳(1)的一侧均固定连接有滑轮(605)。
3.如权利要求2所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述活动壳(601)的表面套设有加固环(606),所述加固环(606)靠近防护壳(1)的一侧与防护壳(1)固定连接。
4.如权利要求3所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述活动壳(601)内腔靠近防护壳(1)的一侧均固定连接有两个滑杆(607),两个滑杆(607)的表面之间与连接板(603)活动连接。
5.如权利要求1所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述安装壳(4)两侧的底部均固定连接有加固板(7),所述加固板(7)的底部与定位壳(3)内腔的底部固定连接。
6.如权利要求1所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述安装壳(4)前侧和后侧的顶部均固定连接有安装板(8),所述安装板(8)的表面开设有安装孔(9)。
7.如权利要求1所述的一种用于全地形机器人的辅助下井装置,其特征在于:所述定位壳(3)内腔底部的两侧均连通有限位套(10),所述限位套(10)的材质为塑料。
技术总结
本技术公开了一种用于全地形机器人的辅助下井装置,包括防护壳,所述防护壳为八边形,所述防护壳的内腔设置有八个连接杆,八个连接杆相对的一侧之间固定连接有定位壳,所述定位壳内腔的底部连通有安装壳,所述防护壳的左侧和后侧均固定连接有限位杆,所述防护壳的前侧和右侧均固定连接有防晃组件,所述防晃组件包括活动壳,所述活动壳靠近防护壳的一侧与防护壳固定连接,活动壳内腔靠近防护壳的一侧固定连接有弹簧,弹簧远离防护壳的一侧固定连接有连接板,本技术通过设置防护壳、连接杆、定位壳、安装壳、限位杆和防晃组件的配合使用,解决了现有的机器人在下井时都是通过吊绳进行悬挂下井、容易造成磨损的问题。
技术研发人员:郑文魁,曾伟杭,周钰强,吴甜
受保护的技术使用者:中国安能集团第二工程局有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!