一种煤矿用隔爆兼本安型挂轨式消防灭火机器人的制作方法
本技术属于矿用灭火设备应用,尤其涉及一种煤矿用隔爆兼本安型挂轨式消防灭火机器人。
背景技术:
1、现有井下灭火的方式主要分三种,直接灭火法、隔绝灭火法以及联合灭火法,其中,直接灭火法是采用水或灭火器对火源直接扑灭,隔绝灭火法是在火势增大,直接灭火法无法达到灭火目的时候,通过封闭灭火区、隔断氧气的方式来达到灭火的目的,而联合灭火法则是在封闭灭火区后再辅以其他灭火手段,如灌浆、灌惰性气体。
2、考虑到防火于未然,但煤炭的自然是人为很难控制且井下坑道较多,也不可能实现全部的监控,为此,需要引入机器人对坑道进行巡检,但现有市场上的市场灭火机器人多为地面工作,其巡检在一定程度上影响了坑道的使用。
技术实现思路
1、本实用新型针对灭火机器人影响坑道使用的技术问题,提出一种设计合理、结构简单、加工方便且在影响坑道使用的情况下实现对坑道巡检并有效处置火源的煤矿用隔爆兼本安型挂轨式消防灭火机器人。
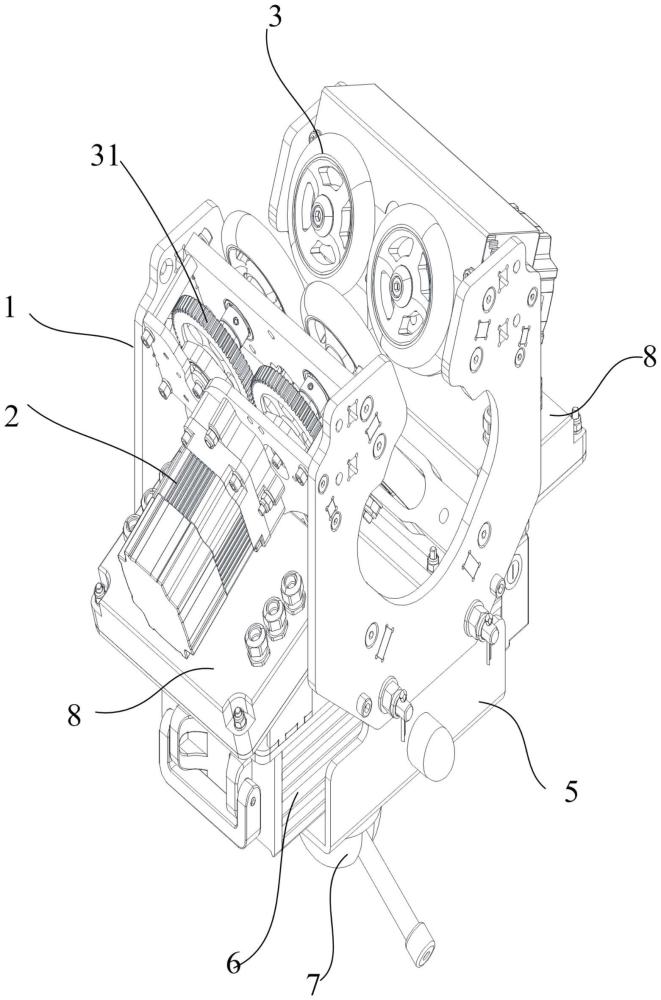
2、为了达到上述目的,本实用新型采用的技术方案为:本实用新型提供一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,包括用于悬挂在轨道上的机器人本体,所述机器人本体包括机架以及设置在机架两侧的驱动电机,所述驱动电机的动力端连接有悬挂在轨道上的行走轮,所述机架的底部连接有固定架,所述固定架内设置有干粉灭火器,所述干粉灭火器设置在固定架和机架之间,所述固定架的底部安装有自动消防炮,所述自动消防炮与干粉灭火器之间管道连接,所述机架外设置有用于包裹机架的壳体,所述壳体的材质为不锈钢。
3、作为优选,所述驱动电机的动力端连接有转轴,所述转轴上套装有驱动齿轮,所述驱动齿轮啮合有辅助齿轮,所述辅助齿轮和行走轮之间通过转动轴连接。
4、作为优选,所述驱动齿轮的两侧啮合有辅助齿轮。
5、作为优选,所述行走轮为胶轮。
6、作为优选,所述干粉灭火器可插接固定在固定架和机架之间。
7、作为优选,所述机架上还设置有辅助行走轮,所述辅助行走轮设置在行走轮的下方。
8、与现有技术相比,本实用新型的优点和积极效果在于:
9、1、本实用新型提供一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,通过将驱动电机和电池设置在机架上的结构,方便利用壳体将其包裹在内,进而达到本安型隔爆的要求,同时,固定架的设置,方便对干粉灭火器的更换,利用自动消防炮的设置,使其感应热源,从而实现灭火于未然。同时,配合挂轨式的结构设计,有效避免了对坑道其他工作的影响。
技术特征:
1.一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,包括用于悬挂在轨道上的机器人本体,所述机器人本体包括机架以及设置在机架两侧的驱动电机,所述驱动电机的动力端连接有悬挂在轨道上的行走轮,所述机架的底部连接有固定架,所述固定架内设置有干粉灭火器,所述干粉灭火器设置在固定架和机架之间,所述固定架的底部安装有自动消防炮,所述自动消防炮与干粉灭火器之间管道连接,所述机架外设置有用于包裹机架的壳体,所述壳体的材质为不锈钢。
2.根据权利要求1所述的一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,所述驱动电机的动力端连接有转轴,所述转轴上套装有驱动齿轮,所述驱动齿轮啮合有辅助齿轮,所述辅助齿轮和行走轮之间通过转动轴连接。
3.根据权利要求2所述的一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,所述驱动齿轮的两侧啮合有辅助齿轮。
4.根据权利要求3所述的一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,所述行走轮为胶轮。
5.根据权利要求1~4任一项所述的一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,所述干粉灭火器可插接固定在固定架和机架之间。
6.根据权利要求5所述的一种煤矿用隔爆兼本安型挂轨式消防灭火机器人,其特征在于,所述机架上还设置有辅助行走轮,所述辅助行走轮设置在行走轮的下方。
技术总结
本技术属于矿用灭火设备应用技术领域,尤其涉及一种煤矿用隔爆兼本安型挂轨式消防灭火机器人。包括用于悬挂在轨道上的机器人本体,所述机器人本体包括机架以及设置在机架两侧的驱动电机,所述驱动电机的动力端连接有悬挂在轨道上的行走轮,所述机架的底部连接有固定架,所述固定架内设置有干粉灭火器,所述干粉灭火器设置在固定架和机架之间,本技术通过将驱动电机和电池设置在机架上的结构,方便利用壳体将其包裹在内,进而达到本安型隔爆的要求,同时,固定架的设置,方便对干粉灭火器的更换,利用自动消防炮的设置,使其感应热源,从而实现灭火于未然。同时,配合挂轨式的结构设计,有效避免了对坑道其他工作的影响。
技术研发人员:成旭东,王周,薛成冰,王涛,汤英,王文娟
受保护的技术使用者:陕西智引科技有限公司
技术研发日:20230826
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!