基于3D可视化模型的远程煤机控制方法与流程
本发明属于智能煤机领域,涉及一种基于3d可视化模型的远程煤机控制方法。
背景技术:
1、我国煤矿井下作业多采用采煤机、掘进机等进行作业;采煤机或掘进机等一般由现场工人进行操控实现采煤作业或掘进作业。
2、基于安全、环保以及高效节能的目的,我国提出了智能化矿山建设的目标。其中,采煤机或掘进机等前线设备无人值守、智能化作业是实现智能化矿山建设的关键之一。
3、在当前技术中,采煤机或掘进机等前线设备无人值守、智能化作业主要通过图像采集传感器以及激光雷达等传感器配合,以实现对前线设备的位置、动作以及当前作业环境的判断。但是,现场作业环境极其恶劣,传感器采集信号难以处理或采集的信号模糊不清,很大程度影响对前线设备生成下个动作的指令。
技术实现思路
1、为克服上述相关技术中的缺陷,本发明提供一种基于3d可视化模型的远程煤机控制方法,可以降低对传感器的依赖,实现远程对工作面或掘进面上的设备进行作业控制。
2、本发明的一些实施例提供一种基于3d可视化模型的远程煤机控制方法。
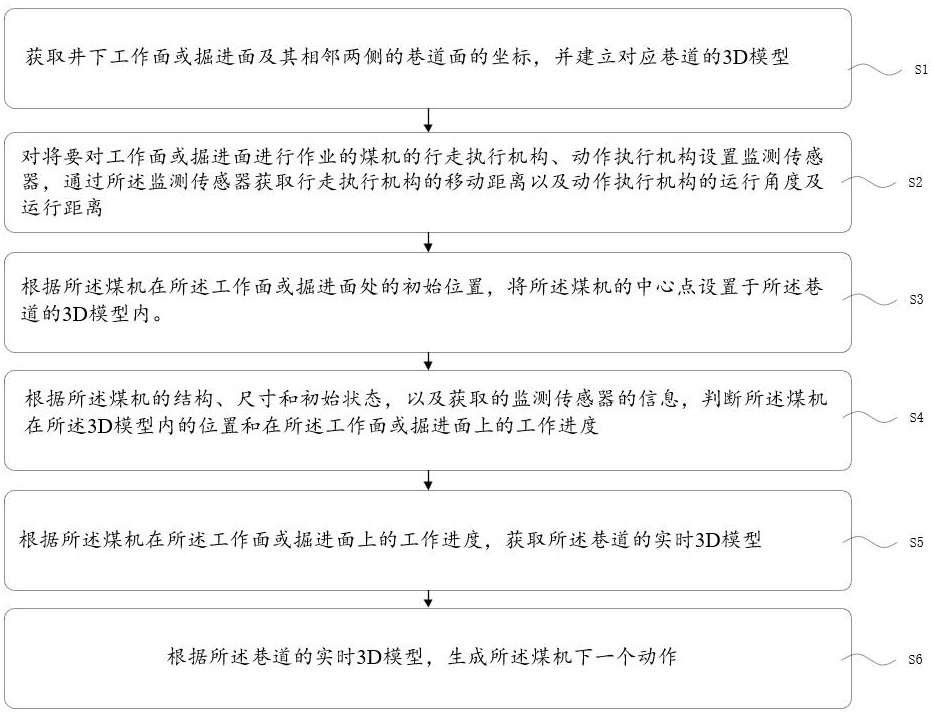
3、所述的基于3d可视化模型的远程煤机控制方法包括:获取井下工作面或掘进面及其相邻两侧的巷道面的坐标,并建立对应巷道的3d模型。对将要对工作面或掘进面进行作业的煤机的行走执行机构、动作执行机构设置监测传感器,通过所述监测传感器获取所述行走执行机构的移动距离以及动作执行机构的运行角度及运行距离。根据所述煤机在所述工作面或掘进面处的初始位置,将所述煤机的中心点设置于所述巷道的3d模型内。根据所述煤机的结构、尺寸和初始状态,以及获取的监测传感器的信息,判断所述煤机在所述3d模型内的位置和在所述工作面或掘进面上的工作进度。根据所述煤机在所述工作面或掘进面上的工作进度,获取所述巷道的实时3d模型。根据所述巷道的实时3d模型,生成所述煤机下一个动作。
4、优选地,所述获取井下工作面或掘进面及其相邻两侧的巷道面的坐标,并建立对应巷道的3d模型包括:在所述工作面或掘进面及其相邻两侧的巷道面上建立多个网格点。采用激光雷达或激光测距仪对所述工作面或掘进面及其相邻两侧的巷道面上的多个网格点进行坐标采集。对每个网格点的激光扫描角度、激光扫描位置和ins信息进行数据处理后,获取对应的网格点在坐标系中的坐标参数。根据多个网格点的坐标参数生成巷道的3d模型。
5、优选地,所述煤机的行走执行机构包括行走动力件,所述行走动力件的输出轴上设置有监测传感器,所述监测传感器为第一编码器,所述第一编码器与所述煤机的控制中心电气连接,所述第一编码器用于采集所述行走动力件的输出轴转动角度,以计算所述煤机的行走距离。
6、优选地,所述动作执行机构包括:动作动力件和动作执行机构的末端,所述动作动力件的输出端与动作执行机构的末端连接;安装于所述动作执行机构的末端的监测传感器包括行程传感器,所述行程传感器用于采集所述动作执行机构的末端、所述动作动力件的外壳之间的相对位移距离。
7、或者,安装于所述动作执行机构的末端的监测传感器包括第三编码器,所述第三编码器与所述煤机的控制中心电气连接,所述第三编码器用于采集所述动作执行机构的末端的转动角度,以计算所述动作执行机构的末端的运行角度。
8、优选地,根据所述煤机的结构、尺寸和初始状态,以及获取的监测传感器的信息,判断所述煤机在所述3d模型内的位置和在所述工作面或掘进面上的工作进度的方法包括:建立所述动作执行机构的末端在3d模型中的运行轨迹。根据所述动作执行机构的末端在3d模型中的位置及运行轨迹,以及所述巷道的3d模型中工作面或掘进面的位置,建立所述3d模型内的工作面或掘进面的工作进度。
9、优选地,所述建立所述3d模型内的工作面或掘进面的工作进度的方法包括:根据所述动作执行机构的末端在3d模型中的运行轨迹,判断所述动作执行机构的末端的运行轨迹与巷道的3d模型中工作面或掘进面是否存在重叠。若所述动作执行机构的末端的运行轨迹与巷道的3d模型存在重叠,则所述煤机对所述工作面或掘进面进行作业。若所述动作执行机构的末端的运行轨迹与巷道的3d模型中工作面或掘进面不存在重叠,则所述煤机未对所述工作面或掘进面进行作业。
10、优选地,根据所述煤机在所述工作面或掘进面上的工作进度,获取所述巷道的实时3d模型的方法包括:当所述煤机对所述工作面或掘进面进行作业时,获取所述动作执行机构的末端与巷道的3d模型重叠区域,并在巷道的3d模型的基础上,建立去除所述重叠区域后的巷道的3d模型为实时3d模型。
11、本发明的有益效果在于:
12、本发明采用监测传感器,可以获取煤机对应的运行轨迹,将煤机的运行轨迹对应的在3d模型建立运行轨迹模型,建立煤机在3d模型内的作业模型,并根据模型来设计煤机的下个动作,可以降低对图像采集传感器或激光雷达传感器的依赖,提高煤机的反应速度和运行效率。
技术特征:
1.一种基于3d可视化模型的远程煤机控制方法,其特征在于,包括:
2.根据权利要求1所述的基于3d可视化模型的远程煤机控制方法,其特征在于,所述获取井下工作面或掘进面及其相邻两侧的巷道面的坐标,并建立对应巷道的3d模型包括:
3.根据权利要求2所述的基于3d可视化模型的远程煤机控制方法,其特征在于,所述煤机的行走执行机构包括行走动力件,
4.根据权利要求3所述的基于3d可视化模型的远程煤机控制方法,其特征在于,所述动作执行机构包括:动作动力件和动作执行机构的末端,所述动作动力件的输出端与动作执行机构的末端连接;安装于所述动作执行机构的末端的监测传感器包括行程传感器,所述行程传感器用于采集所述动作执行机构的末端、所述动作动力件的外壳之间的相对位移距离;
5.根据权利要求4所述的基于3d可视化模型的远程煤机控制方法,其特征在于,根据所述煤机的结构、尺寸和初始状态,以及获取的监测传感器的信息,判断所述煤机在所述3d模型内的位置和在所述工作面或掘进面上的工作进度的方法包括:
6.根据权利要求5所述的基于3d可视化模型的远程煤机控制方法,其特征在于,所述建立所述3d模型内的工作面或掘进面的工作进度的方法包括:
7.根据权利要求6所述的基于3d可视化模型的远程煤机控制方法,其特征在于,根据所述煤机在所述工作面或掘进面上的工作进度,获取所述巷道的实时3d模型的方法包括:
技术总结
本发明属于智能煤机领域,涉及一种基于3D可视化模型的远程煤机控制方法;可以降低对传感器的依赖,实现远程对工作面或掘进面上的设备进行作业控制。技术方案包括:获取井下工作面或掘进面及其相邻两侧的巷道面的坐标,并建立对应巷道的3D模型。对将要对工作面或掘进面进行作业的煤机的行走执行件、动作执行机构的末端设置监测传感器,通过监测传感器获取行走执行件的移动距离以及动作执行机构的末端的运行角度及运行距离。根据煤机在工作面或掘进面处的初始位置,将煤机的中心点设置于巷道的3D模型内。根据煤机的结构、尺寸和初始状态,以及获取的监测传感器的信息,获取巷道的实时3D模型。根据巷道的实时3D模型,生成煤机下一个动作类型。
技术研发人员:李俊,毛贝贝
受保护的技术使用者:太原矿机物联科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!