具有驱动-驱动配置的齿轮泵中的齿轮的动态控制的制作方法
具有驱动-驱动配置的齿轮泵中的齿轮的动态控制
1.优先权
2.本技术要求2020年7月8日提交的第63/049307号美国临时专利申请的优先权,其全部通过引用并入本文。
技术领域
3.本公开的实施例一般地涉及一种用于控制流体泵的系统及方法,且更特别地,涉及一种动态控制具有驱动-驱动配置的齿轮泵中的齿轮的扭矩和/或位置的系统及方法。
背景技术:
4.齿轮泵通常用于工业流体抽吸系统,诸如(例如)工业装备、航空等等的液压系统。这种系统中的齿轮泵一般为驱动器驱动系统,其中一个齿轮耦接至马达(驱动器齿轮)且驱动器齿轮与另一齿轮(从动齿轮)啮合且驱动该另一齿轮以将流体从泵的进口转移至泵的出口。齿轮之间的公差必须考虑各种参数(诸如工作流体的操作温度及压力的变动),使得齿不随参数改变而锁定。例如,随着流体的温度从启动条件上升至完全操作温度,齿轮将变大且齿轮之间的公差必须使得齿轮之间始终存在一些“游隙”或“齿隙”,使得齿轮不锁定。另外,齿轮之间的公差必须允许从动齿轮根据其经受的力来在极限内“自调整”。例如,随着流量和/或排放压力改变,齿轮与齿轮接触上的力亦改变。因为驱动器驱动系统中的从动齿轮由另一齿轮推动而非由马达以精确角速度驱动,所以从动齿轮将根据齿轮齿之间的力的任何改变来自动调整,如果齿轮之间存在一些公差的话。
5.与驱动器驱动齿轮泵相比,申请人的美国专利第10,072,676号(「'676专利」)揭示具有两个流体驱动器的泵(驱动-驱动泵)的控制。'676专利揭示一种驱动-驱动泵,其中两个齿轮由各自马达以精确角速度分别驱动,且可通过使一个齿轮比另一齿轮“略快地”被驱动来维持齿轮与齿轮接触。显然,两个齿轮将按相同角速度转动(就具有1:1的齿轮比的泵而言)。这是因为被略快驱动的齿轮上的齿将接触另一齿轮上的齿且两个齿轮按相同角速度转动。在操作中,对两个马达的速度需求的差别被设定成预期对置齿轮齿之间的接触力足够高以在所有操作条件期间维持对置齿表面之间的密封。
6.在其中接触力在所有操作条件期间维持密封的驱动-驱动系统中,两个齿轮不归因于液压流体的流量、压力及温度而根据齿轮上的力的改变来“自调整”。例如,随着温度上升,齿轮齿会变大且齿轮上的力会增大。因此,在这种驱动-驱动系统中,马达、齿轮齿及齿轮之间的公差必须针对最坏情况应力(其通常发生于按最高额定速度经历的流量、压力和/或温度处)来设计。然而,若驱动-驱动系统被配置成按各种操作条件操作,则针对最坏情况方案来设计可意谓驱动-驱动泵在正常操作条件下可能不高效和/或可能不具有最经济构造。替代地,若驱动-驱动系统被设定成使得适当的接触力用于正常操作条件,则接触力在最坏情况方案期间可能不足以维持适当操作和/或效率。
7.另外,归因于制造过程,齿轮齿尺寸始终存在一些变动。这种变动会导致对应啮合齿之间的接触力变动。例如,在齿轮的每个回转内,对应齿轮齿之间的接触力可从几乎无接
触力(例如对应于小于1nm的扭矩,其取决于齿轮配置和/或齿轮大小)变动至过度接触力(例如对应于大于10nm的扭矩,其取决于齿轮配置和/或齿轮大小)。啮合齿之间的接触力的变动会导致齿轮齿上的不均匀和/或过度磨损和/或齿轮齿的过早失效。为最小化临界和/或高rpm泵(例如大于6000rpm)中接触力的变动,将齿轮制造成紧密公差,这提高了系统的成本。
8.本领域技术人员将通过比较常规、传统的已提出的方法与本发明的在本公开剩余部分中参考附图所阐述的实施例而显而易见这些方法的其他局限及缺点。
技术实现要素:
9.本公开的较佳实施例是针对可基于来自流体系统的反馈和/或控制系统的操作模式来动态同步化齿轮泵的一对或多对啮合齿轮齿之间的扭矩和/或位置的控制系统。本文中所使用的“啮合齿轮齿对”意谓一个齿轮上的齿及另一齿轮上的对应齿,它们随着齿轮转动及啮合而接触和/或在它们之间形成小间隙。取决于齿轮比,齿轮齿可具有另一齿轮上的一个或多个对应齿轮齿。本文中所使用的“同步化位置”意谓随着啮合齿轮齿对转动而控制一个或多个齿轮齿相对于其对应齿轮齿的位置。本文中所使用的“同步化扭矩”意谓随着一对或多对啮合齿轮齿在转动期间接触而将马达之间的差动扭矩控制为预定值和/或在预定范围内。本文中所使用的“差动扭矩”意谓马达和/或齿轮的扭矩差。
10.在例示性实施例中,一种泵控制电路可动态同步化数对的一个或多个啮合齿轮齿之间的扭矩和/或位置。该泵控制电路可被配置成基于对应于所述数对的一个或多个啮合齿轮齿之间的扭矩(例如差动扭矩)和/或相对位置的反馈信号来调整至驱动第一齿轮的第一马达的第一马达需求信号和/或至驱动第二齿轮的第二马达的第二马达需求信号。在一些实施例中,马达需求信号基于马达速度。然而,在其他实施例中,需求信号可基于马达电流、马达驱动频率、马达电压、马达功率和/或某一其他马达参数。该泵控制电路较佳地包含被配置成接收该反馈信号的反馈电路。较佳地,该反馈信号对应于系统参数(例如流体密度、粘度、温度、压力、体积流量和/或被抽吸的流体的某一其他性质)、泵参数(例如泵rpm、泵温度和/或某一其他泵参数)、马达参数(例如马达电流、马达电压、马达功率、马达频率和/或某一其他马达参数)、齿轮参数(例如齿轮rpm、齿轮齿速度、齿轮齿位置、编码器反馈和/或某一其他齿轮参数)和/或另一反馈信号。在一些实施例中,该反馈信号与该第一齿轮与该第二齿轮之间的差动扭矩相关。在一些实施例中,该反馈信号与该第一齿轮的位置、该第二齿轮的位置和/或该第一齿轮与该第二齿轮的相对位置相关。当然,如上文所讨论,其他反馈可与适当电路系统一起由该泵控制电路用于动态同步化扭矩和/或动态同步化位置。
11.在另一例示性实施例中,一种泵系统包含泵总成,其较佳地具有界定内部容积的泵壳体。该泵总成可包含第一齿轮及第二齿轮,它们被安置成使得该第一齿轮与该第二齿轮啮合。该泵总成包含用于驱动该第一齿轮的第一马达及用于驱动该第二齿轮的第二马达。较佳地,该泵系统包含被配置成将第一速度需求信号提供至该第一马达及将第二速度需求信号提供至该第二马达的泵控制电路。较佳地,该泵控制电路被配置成通过调整该第一速度需求信号和/或该第二速度需求信号来基于扭矩反馈信号动态同步化扭矩和/或基于相对位置反馈信号动态同步化位置。
12.在另一例示性实施例中,一种控制驱动-驱动配置中的泵的马达的方法包含将第一马达需求信号提供至驱动第一齿轮的第一马达及将第二马达需求信号提供至驱动第二齿轮的第二马达。该方法亦包含通过调整该第一需求信号和/或该第二需求信号来基于扭矩反馈信号动态同步化扭矩和/或基于相对位置反馈信号动态同步化位置。
13.本发明的“发明内容”被提供为本发明的一些实施例的大体介绍且不意欲限制任何特定流体驱动致动器总成或控制器系统配置。应了解,“发明内容”中所描述的各种特征及特征配置可按任何适合方式组合以形成本发明的任何数目个实施例。本文中提供包含变动及替代配置的一些额外实例性实施例。
附图说明
14.并入本文中且构成本说明书的部分的附图绘示本发明的例示性实施例且与上文所给出的一般描述及下文将给出的详细描述一起用于解释本发明的例示性实施例的特征。
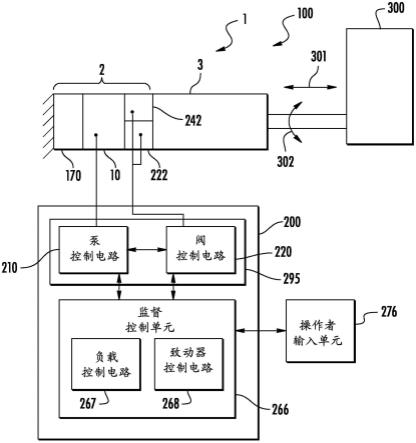
15.图1是具有流体驱动致动器总成及控制系统的较佳实施例的流体驱动致动器系统的框图。
16.图2示出具有外部齿轮泵及储存器件的泵总成的例示性实施例的分解图。
17.图3示出具有驱动-驱动配置且具有安置于泵内部的外部上的马达的泵总成的另一例示性实施例的截面图。
18.图4示出图1的外部齿轮泵的俯视截面图及例示性流动路径。
19.图5是根据本公开的实施例的泵控制系统的示意性框图。
20.图6a示出了外部齿轮泵的例示性操作的速度需求对啮合齿轮对的例示性曲线图。
21.图6b示出了对应于图6a的曲线图的啮合齿对。
22.图7是使用间隙控制方案的外部齿轮泵的啮合区域的放大图。
具体实施方式
23.本公开的例示性实施例针对驱动-驱动控制系统,其中泵的齿轮按包含同步扭矩模式操作和/或同步位置模式操作的操作模式被驱动。本公开的例示性实施例也可针对包含用于转移流体的两个齿轮的齿轮泵,其中各齿轮由各自马达驱动。例如,泵可以是具有驱动-驱动配置的外部齿轮泵或内部齿轮泵。
24.较佳地,控制系统可在齿轮泵的操作期间动态地同步化一对或多对啮合齿轮齿之间的扭矩和/或位置。在一些实施例中,控制系统基于诸如(例如)以下的反馈来控制齿轮泵:系统参数(例如流体密度、粘度、温度、压力、体积流量和/或被抽吸的流体的某一其他属性)、泵参数(例如泵rpm、泵温度和/或某一其他泵参数)、马达参数(例如马达电流、马达电压、马达功率、马达频率和/或某一其他马达参数)、齿轮参数(例如齿轮rpm、齿轮齿速度、齿轮齿位置、编码器反馈和/或某一其他齿轮参数)和/或另一反馈信号。在一些实施例中,泵控制系统可动态同步化一对或多对啮合齿轮齿之间的扭矩以使对应齿轮齿之间的扭矩维持在预定设定点。例如,泵控制系统可被配置成维持可归因于(例如)齿之间的接触力和/或系统条件(例如系统压力、流量、温度等等)的啮合齿轮齿之间的差动扭矩。较佳地,差动扭矩维持在基于系统条件和/或泵的操作条件的扭矩设定点。在一些实施例中,扭矩反馈信号基于来自马达中的一者或两者的马达电流反馈信号。在一些实施例中,泵控制系统可动态
同步化一对或多对啮合齿轮齿的位置以使对应齿之间的相对位置(本文中亦称为“间隙宽度”)维持在预定设定点(例如间隙宽度设定点)。较佳地,预定设定点可基于泵的操作条件,诸如(例如)被抽吸的流体的温度。
25.图1示出了流体操作系统100的例示性框图。流体操作系统100包含操作负载300的流体驱动致动器总成1。流体驱动致动器总成1包含流体驱动致动器3(其可以是例如对外部负载执行作业的液压缸、液压马达或另一类型的流体驱动致动器)及泵总成2。当流体驱动致动器是诸如液压缸之类的线性致动器时,负载300可沿诸如例如线性方向301之类的线性方向移动。若流体驱动致动器是诸如液压马达之类的转动致动器,则负载300可诸如例如沿转动方向302转动。泵总成2可包含泵10、比例控制阀总成222及242和/或储存器件170。液压致动器3可由来自泵10的流体操作,泵10可由致动器控制系统200控制。
26.较佳地,致动器控制系统200包含驱动单元295,其具有控制泵10的泵控制电路210和/或控制比例控制阀总成222及242的阀控制电路220。致动器控制系统200较佳地包含控制系统的总体操作的监督控制单元266。监督控制单元266可包含用于自使用者接收命令的操作者输入单元276。操作者输入单元276可以是例如人机接口(例如键盘、监视器、鼠标、操纵杆和/或另一用户接口)。在一些实施例中,监督控制单元266(和/或另一控制器)可包含负载控制电路267,其可包含用于控制负载300的控制逻辑(例如硬件、软件、算法等等)。在一些实施例中,负载控制电路267与泵控制电路210通信以操作负载300。较佳地,监督控制单元266(和/或另一控制器)可包含致动器控制电路268,其可包含用于控制流体驱动致动器总成1的控制逻辑(例如硬件、软件、算法等等)。在一些实施例中,致动器控制电路268与泵控制电路210通信以操作流体驱动致动器总成1。具有泵控制电路210和/或阀控制电路220的驱动单元295可包含硬件和/或软件,其解译来自监督控制单元266和/或用户经由输入单元276的参数反馈信号(例如与系统压力、流量、温度、阀、致动器和/或齿轮位置和/或速度、马达电流和/或电压和/或某一(些)其他量测参数相关的信号)和/或命令信号(例如流量和/或压力设定点和/或某一(些)其他控制信号)且将适当需求信号(例如速度、扭矩和/或位置需求信号和/或某一(些)其他需求信号)发送至泵10及控制阀总成222、242以定位负载300。为简洁起见,相对于具有液压泵及液压致动器(例如液压缸、液压马达和/或另一类型的液压致动器)的液压流体系统来给出例示性实施例的描述。然而,本公开的发明特征适用于除液压系统以外的流体系统。
27.在一些例示性实施例中,泵总成2可包含用于视需要储存及释放液压流体的储存器件170。储存器件170亦可在流体密度及因此流体体积归因于例如流体的温度改变而改变(或由于某一其他原因的流体体积改变)时储存及释放液压流体。此外,储存器件170亦可用于吸收归因于泵10和/或阀总成222、242的操作而在系统中产生的液压冲击。
28.在一些实施例中,包含比例控制阀总成222及242及储存器件170的泵总成2可通过使用例如螺钉、螺栓和/或某一其他紧固手段来与液压致动器3结合,使得由流体驱动致动器总成1占用的空间减小。因此,如图1中所见,在一些例示性实施例中,本公开的流体驱动致动器总成1具有提供紧凑设计的集成配置。然而,在其他实施例中,流体驱动致动器总成1中的一个或所有组件(诸如(例如)液压泵10、液压致动器3和/或控制阀总成222和/或242)可单独安置及操作性连接,无需使用集成配置。例如,仅泵10及控制阀222、242可结合(或器件的任何其他组合可结合)。
29.图2示出可与液压致动器(例如线性致动器和/或液静压传动系统)一起使用的泵总成2的例示性实施例的分解图。泵总成2包含泵10及储存器件170。为清楚起见,未展示比例控制阀总成222及242。泵10及储存器件170的配置及操作可见于申请人的美国专利第9,228,586号及美国专利第10,294,936号中,这些专利的全文以引用方式并入本文中。因此,为简洁起见,除描述本例示性实施例需要的外,省略泵10及储存器件170的配置及操作的详细描述。储存器件170可以是例如加压容器(例如蓄积器)且可经由诸如例如管道、软管、通道或其他类型的连接(图中未展示)之类的构件来连接至端口22和/或端口24。泵10包含两个流体驱动器40、60,它们分别包含原动机及流体排量部件。在图2所绘示的例示性实施例中,原动机是电动马达41、61且流体排量部件是正齿轮50、70。在此实施例中,两个泵马达41、61在组装时安置于齿轮50、70的圆柱形开口51、71内部。然而,本公开的例示性实施例涵盖其他马达/齿轮配置。例如,图3绘示泵总成的实施例的截面图,其中流体驱动器40'及60'的马达41'、61'安置于泵内部的外部上。其他例示性泵配置可见于美国专利第9,228,586号及美国专利第10,294,936号中。
30.如图2中所见,泵10表示正排量(或固定排量)齿轮泵。齿轮对50、70安置于内部容积98中。齿轮50、70中的每个具有从各自齿轮体径向向外延伸的多个齿轮齿52、72。齿轮齿52、72在由例如电动马达41、61转动时将流体从进口转移至出口。泵10可以是可变速度和/或可变扭矩泵(例如,马达41、61可以是可变速度和/或可变扭矩),因此,齿轮50、70的转动可被改变以产生各种体积流量及泵压力。在一些实施例中,泵10是双向的(例如,马达41、61可以是双向的)。在这种实施例中,任一端口22、24可以是进口端口且另一端口将为出口端口,其取决于齿轮50、70的转动方向。
31.流体驱动器40、60安置于由泵壳体20的内壁界定的内部容积98中。流体驱动器40、60的轴42、62安置于泵壳体20的端口22与端口24之间且在一端84处由板80支撑及在另一端86处由板82支撑。马达41、61的定子44、64径向安置于各自轴42、62与转子46、66之间。定子44、64固定地连接至各自轴42、62,轴42、62固定地连接至壳体20的板82、84。转子46、66较佳地经由轴承(图中未展示)连接至固定轴44、64。转子46、66安置于定子44、64的径向外且包围各自定子44、64。在一些实施例中,马达41、61包含壳体(图中未展示)且马达41、61经由马达壳体耦接至齿轮50、70。因此,在此实施例中,马达41、61具有外转子马达布置(或外部转子马达布置),其意谓马达的外侧转动且马达的中心固定。相比而言,在图3的实施例中的马达41'及61'可具有其中转子附接至转动中心轴的内部转子马达布置。
32.如图2中所展示,在一些实施例中,储存器件170可安装至泵10的例如端板80上以形成一个集成单元。在一些实施例中,储存器件170可与泵10分开安置。储存器件170可储存由泵10抽吸的流体且供应执行命令操作所需的流体。在一些实施例中,泵10中的储存器件170可以是储存系统的流体的加压容器。在这种实施例中,储存器件170可加压至适合于系统的指定压力。在操作期间,若相关端口22、24处的压力下降至低于储存器件170的流体室(图中未展示)中的压力,则来自储存器件170的加压流体可被推动至适当端口22、24,直至压力均衡。相反地,若相关端口22、24处的压力变成高于流体室的压力,则来自端口的流体可经由管道、软管、通道或其他类型的连接(图中未展示)来被推动至储存器件170的流体室。本领域技术人员了解液压系统中储存器件的配置及操作,因此,为简洁起见,将不进一步讨论。尽管上文所讨论的例示性实施例仅绘示一个储存器件,但本公开的例示性实施例
可具有一个或多个储存器件。
33.图4绘示外部齿轮泵10及基于齿轮50、70的转动(分别参阅转动箭头74及76)的泵10的例示性流体流动路径(参阅流动箭头92、94、94'、96)的俯视截面图。尽管马达41及61展示为安置于内部容积98中,但在一些实施例中,马达中的一者或两者可安置于内部容积98外部。较佳地,两个齿轮50、70分别由单独设置的马达41、61独立驱动。在图4的实施例中,齿轮比是1:1,且为清楚及简洁起见,本公开的例示性实施例具有1:1的齿轮比。然而,本公开适用于具有除1:1以外的齿轮比的泵的控制,且本领域技术人员应了解如何将本公开的发明概念应用于具有各种齿轮比的泵的控制。
34.较佳地,泵控制电路210被配置成按各种操作模式操作泵,诸如例如控制过程(例如将流体系统1中的流量和/或压力控制为适当操作设定点或范围)和/或控制致动器3的位置(例如将致动器定位于预定位置处)。应注意,操作模式未必互斥。例如,将线性致动器从接近其行程的一端定位成接近其行程的另一端可包含泵控制电路210将被抽吸的流体的流量和/或压力控制为操作设定点或范围,同时将致动器位置最终设定在预定位置设定点处。
35.如图5中所见,泵控制电路210可包含泵需求控制器510、泵操作控制器515、致动器位置控制器520、运动控制器530、控制模式开关540、同步化位置控制器550、同步化扭矩控制器560、间隙反馈电路555、扭矩反馈电路545和/或马达控制器570、580。泵操作控制器515可从例如监督控制单元266、驱动单元295和/或另一控制器接收泵操作信号,诸如例如泵起动/停止信号和/或泵方向信号。在一些实施例中,泵操作控制器515亦可从致动器位置控制器520(下文将进一步讨论)接收泵起动/停止信号和/或泵方向信号。基于所接收的信号,泵操作控制器515可输出开/关信号532以起动或停止泵10和/或输出正向/反向信号534以设定泵10的转动方向。信号532、534可发送至运动控制器530,运动控制器530接着将个别开/关信号532a、532b及正向/反向信号534a、534b输出至操作马达41、61的各自马达控制器570及580。在一些实施例中,信号532、534可直接发送至马达控制器570、580。电源供应器(图中未展示)可将所需电力供应至马达控制器570及580,使得控制器570及580可输出驱动各自马达41、61所需的电流。马达控制器570、580可包含诸如反相器、igbt开关、scr及相关联控制器之类的硬件以分别基于个别速度需求信号536a、536b来将所需电流输出至马达41、61。较佳地,马达控制器570、580是可变速度马达控制器。可变速度马达控制器是本领域技术人员已知的且可以是“现成”产品。因此,为简洁起见,将不进一步讨论可变速度马达控制器的配置。
36.在一些实施例中,个别速度需求信号536a、536b可基于齿轮齿之间的所需平均接触力。例如,泵操作控制器515可将差动速度调整信号516输出至控制模式开关540。较佳地,差动速度调整信号516对应于啮合齿轮齿对之间的所需平均接触力。差动速度调整信号516可由泵操作控制器515内部产生和/或从控制单元266和/或驱动单元295(和/或另一控制器)接收。基于控制模式,差动速度调整信号516可作为差动需求调整信号542从控制模式开关540输出至运动控制器530,运动控制器530使用差动需求调整信号542来调整个别速度需求信号536a、536b。
37.在一些实施例中,泵需求控制器510可提供用于基于例如系统中的所需流量和/或压力来控制例如齿轮50、70的角速度的泵速度需求信号536。泵需求控制器510可确保流量和/或压力在泵控制系统的各种操作模式期间维持在各自流量和/或压力设定点处。泵需求
控制器510的例示性实施例可见于名称为“system to pump fluid and control thereof”的美国专利申请案第15/756,928号中,该案的全文并入本文中。然而,用于产生泵速度需求信号536的控制方案的类型不是限制性的且本公开的例示性实施例可针对产生用于控制流体系统中的流量和/或压力(例如在泵10的输出处)的泵速度需求信号的其他类型的控制方案。较佳地,泵速度需求信号536可输出至运动控制器530。基于泵需求信号536及差动需求调整信号542,运动控制器530产生及输出个别泵速度需求信号536a及536b分别至马达控制器570及580。
38.在一些实施例中,取决于泵控制系统的操作模式,致动器位置控制器520可精确控制马达41、61的位置以设定流体驱动致动器3的位置。较佳地,致动器位置控制器520可基于参考点(例如固定参考点)来设定流体驱动致动器3的位置。如图5中所见,致动器位置控制器520接收致动器位置设定点信号233(例如来自控制单元266、驱动单元295和/或另一控制器)及来自各自位置传感器231a、231b的一个或两个位置反馈信号232a、232b。较佳地,当反馈信号232a及232b中的一者或两者与致动器位置设定点信号233存在偏差时,致动器位置控制器520可输出起动/停止及方向信号以起动马达41、61(例如经由开/关信号532、532a和/或532b)并且如果适用的话提供转动方向信号(例如经由正向/反向信号534、534a和/或534b)。当反馈信号232a及232b中的一者或两者匹配致动器位置设定点信号233时,致动器位置控制器520可停止马达41、61(例如经由开/关信号532、532a和/或532b)。因此,基于位置设定点信号233与反馈信号232a、232b中的一者或两者之间的差,致动器位置控制器520可将起动/停止及方向信号适当输出至泵操作控制器515(和/或直接输出至运动控制器530和/或直接输出至马达控制器570及580)以设定致动器3的位置。
39.在一些实施例中,致动器位置设定点信号233可被配置成对应于齿轮50和/或齿轮70相对于固定参考点(例如泵壳体上的点、马达轴上的点或不转动的泵上的某一其他点)的所需位置。例如,各马达41、61(及因此附接齿轮)可设定为对应于马达轴42、62上的360度位置的角位置(参阅图4)。因此,在一些实施例中,位置反馈信号232a及232b可与一或多个齿轮齿52、72相对于轴42、62上的360度位置(和/或另一固定位置)的位置相关。在一些实施例中,各齿轮50、70的360度转动位置可由各自马达控制器570、580控制于3.6弧秒内。较佳地,当控制齿轮50、70的角速度时,各自马达控制器570、580可将角速度控制于
±
0.001rpm的准确度内。在操作中,若需要流体驱动致动器3来使负载300移动固定距离(例如液压缸的线性距离及液压马达的角移动),则控制单元266和/或驱动单元295(和/或另一控制器)可被配置成确定马达41、61(及因此齿轮50、70)所需的精确转动数目和/或转动的分数以实现流体驱动致动器3的所需移动。例如,控制单元266和/或驱动单元295(和/或另一控制器)可确定:为实现液压缸或液压马达的所需移动,泵将需要转动+90
°
,其中例如“+”表示泵流出例如端口24且
“‑”
表示泵流出例如端口22。在此情况中,控制单元266和/或驱动单元295(和/或另一控制器)会将90
°
添加至到达致动器位置控制器520的致动器位置设定点信号233。致动器位置控制器520比较致动器位置设定点233与位置反馈信号232a和/或232b之间的差以判定是否应转动泵及若转动则沿哪个方向转动。若需要再定位流体驱动致动器3,则致动器位置控制器520输出起动信号以开启泵10(例如使用开/关信号532、532a和/或532b经由泵操作控制器515和/或运动控制器530)及输出泵10的适当转动方向信号(例如使用正向/反向信号534、534a和/或534b经由泵操作控制器515和/或运动控制器530)。当来自流体驱动
器40、60的位置反馈信号232a和/或232b指示马达/齿轮已转动90
°
时,致动器位置控制器520发送停止信号以关闭泵10(例如使用开/关信号532、532a和/或532b经由泵操作控制器515和/或运动控制器530)。尽管图5中展示一个致动器位置控制器520,但在一些实施例中,可使用彼此通信的两个致动器位置控制器(例如,一个控制器对应于各马达),例如配置成主/从布置。当然,其他控制方案可由致动器位置控制器520用于设定流体驱动致动器3的位置。较佳地,在流体驱动致动器3的行程时间(例如马达控制器570、580操作其各自马达41、61的时间)期间,马达41、61及因此齿轮50、70的角速度分别使用速度需求信号536a及536b(如上文所讨论,其可基于速度需求信号536及差动需求调整信号542)来控制。
40.在一些实施例中,位置设定点信号233和/或位置反馈信号232a、232b对应于360度内的角度且单独追踪需要齿轮50、70转动的转数。然而,在其他实施例中,位置设定点信号233和/或位置反馈信号232a、232b可对应于大于360度的角度。例如,若泵10控制线性致动器的位置且从线性致动器上的最小延伸至完全延伸要使马达41、61完成100转,则运动控制器530和/或传感器231a、231b可被配置成使得线性致动器上的最小位置对应于0度且线性致动器上的最大位置对应于36000度。因此,为使线性致动器移动打开对应于齿轮50、70上的两个全转动的量,位置设定点信号233可例如通过控制单元266和/或驱动单元295(和/或另一控制器)来增大+720度。当然,可使用其他最小度数值及最大度数值。
41.在一些系统中,在泵的操作期间,泵控制系统可维持个别马达上的固定速度差以产生所需平均接触力,其可对应于例如密封齿轮之间的回流的力。较佳地,泵操作控制器515可产生对应于所需接触力的差动速度调整信号516,且差动速度调整信号516可发送至控制模式开关540。基于控制模式(下文将进一步讨论),控制模式开关540可选择差动速度调整信号516且基于差动速度调整信号516来输出差动需求调整信号542。
42.如图5中所见,运动控制器530可接收来自泵需求控制器510的泵速度需求信号536及来自控制模式开关540的差动需求调整信号542。与上文所讨论的开/关及正向/反向信号一起且基于泵速度需求信号536及差动需求调整信号542,运动控制器530可将个别马达速度需求信号536a及536b输出至马达控制器570及580。速度需求信号536a、536b基于所需流量和/或压力来设定各自马达41、61的适当角速度,或更具体言的,速度需求信号536a、536b基于所需流量和/或压力来设定被驱动的齿轮的齿轮速度。如本文中所使用,“齿轮速度”是指齿轮齿的齿尖速度。因此,各齿轮的齿轮速度可相同,而角速度可不同。例如,若泵具有2:1的齿轮比,则至驱动较小齿轮的马达的速度需求信号可约两倍于至较大齿轮的速度需求信号以调整所需接触力。当然,代替速度需求信号536a、536b考虑泵10的齿轮比,马达控制器570及580可被配置成通过适当修改至马达41、61的信号来考虑齿轮比。为清楚起见,本文中所使用的速度需求信号536a及536b对应于齿轮速度。因此,若速度需求信号536a及536b相等,则齿52、72的齿尖速度相等(即使齿轮的角速度可归因于除1:1以外的齿轮比而不同)。
43.运动控制器530可基于速度需求信号536来产生马达41和/或61的速度需求信号且接着在输出信号作为速度需求信号536a、536b之前基于差动需求调整信号542来修改马达41、61的马达速度需求信号中的一者或两者。因此,在一些实施例中,差动需求调整信号542用于产生至马达41、61的速度需求信号的差(本文中亦称为“差动速度需求”)。较佳地,当控制模式开关540选择差动速度调整信号516时,差动速度需求对应于所需平均接触力。基于
差动速度需求,至马达控制器570及580的速度需求信号536a及536b可由运动控制器530设定,使得一个齿轮比另一齿轮略快转动。然而,因为齿轮齿处于啮合配置,所以齿轮将按相同速度转动且速度需求的差产生对置齿轮齿52、72之间的接触力(假定1:1的齿轮比)。在一些控制系统中,差动速度需求是固定的且较佳地与啮合齿轮齿对之间的预定接触力相关。例如,来自泵操作控制器515的差动速度调整信号516可对应于预定平均接触力。差动速度调整信号516由运动控制器530(经由差动需求调整信号542)用于调整速度需求信号536a及536b中的一者或两者,使得产生对应于预定平均接触力的固定差动速度需求。在一些实施例中,固定速度差动调整可以是基于泵、齿轮和/或马达的类型的值。较佳地,固定差动速度需求产生足以密封从泵10的出口端口至进口端口的流体路径的回流或泄漏且使对应扭矩保持于泵马达和/或泵齿轮的可接受扭矩范围内的平均接触力。例如,取决于泵的配置,预定差动速度需求可对应于约1.0nm至约10nm且更佳地约1.0nm至约6nm的范围内的扭矩值。当然,可接受扭矩值和/或范围可取决于例如泵的大小和/或额定值、齿轮的大小和/或配置、马达的大小和/或配置和/或某一其他泵/齿轮/马达参数而不同。因此,当使用时,固定差动速度需求可在泵10的操作期间随着泵需求信号536使马达的速度斜升及斜降而维持。然而,固定差动速度需求通常不提供啮合齿轮齿对之间的均匀接触力和/或扭矩。这是因为齿轮齿的制造公差会产生具有不均匀尺寸的齿轮齿。齿轮齿尺寸的变动会导致接触力产生在齿轮转动时小于1nm和/或大于10nm的扭矩。小于1nm的扭矩会导致归因于高回流或泄漏的低效操作且大于10nm的扭矩会导致齿上的高应力和/或磨损。因此,在这种系统中,个别齿轮齿上的扭矩可能会在泵的操作期间太大或太小。除不均匀齿轮齿尺寸的问题以外,固定差动速度需求不会考虑流体压力的改变和/或波动、泵的机械振动、马达的电/磁性变动和/或会影响啮合齿轮齿的扭矩的设备的操作期间的其他扰动。此外,在一些操作模式期间,可能期望“低效”运行泵以快速温暖操作流体。例如,泵可使用对应啮合齿轮齿对之间的间隙来运行以加热工作流体。因此,在这种情况中,可能不期望固定差动速度需求。
44.在本公开的一些例示性实施例中,在泵10的操作期间,速度需求信号536a、536b的差动速度需求不是固定的,而是可在泵10的操作期间基于齿轮泵10的一对或多对啮合齿轮齿52、72之间的所需差动扭矩和/或所需间隙宽度来动态控制。例如,在一些实施例中,泵控制电路210可被配置成按同步化扭矩操作模式操作以动态同步化一对或多对啮合齿轮齿之间的扭矩以产生和/或维持啮合齿轮齿之间的预定差动扭矩。另外,在一些实施例中,泵控制电路210可被配置成按同步化位置操作模式操作以动态同步化一对或多对啮合齿轮齿之间的位置以产生和/或维持啮合齿轮齿之间的预定间隙宽度。在一些实施例中,泵控制单元210包含基于所接收的控制模式信号544的值来使泵控制单元210处于同步化扭矩操作模式、同步化位置操作模式或固定速度差操作模式(如上文所讨论)中的控制模式开关540。较佳地,控制模式信号544的值可由监督控制266和/或驱动单元295(和/或另一控制器)控制。
45.当泵控制单元210处于同步化扭矩操作模式中时,同步化扭矩控制器560的输出确定差动速度需求。例如,控制模式信号544可被设定成使得控制模式开关540选择来自同步化扭矩控制器560的差动扭矩调整信号564。较佳地,同步化扭矩控制器560被配置成使得差动扭矩调整信号564(及因此差动需求调整信号542)可动态改变以使啮合齿对52、72之间的差动扭矩维持为可接受值和/或在可接受范围内。在一些实施例中,同步化扭矩控制器560接收差动扭矩设定点信号562及来自扭矩反馈电路545的差动扭矩反馈信号547。较佳地,同
步化扭矩控制器560比较差动扭矩反馈信号547与差动扭矩设定点信号562且输出基于比较的差动扭矩调整信号564。例如,同步化扭矩控制器560可包含查找表(lut)或其他数据结构、比例电路、比例-积分(pi)电路、比例-积分-微分(pid)电路和/或提供对应于差动扭矩设定点信号562与差动扭矩反馈信号547之间的差的输出信号的某一其他控制器或电路。较佳地,差动扭矩设定点信号562的值可对应于啮合齿轮齿的可接受扭矩差动值和/或在可接受扭矩差动范围内。差动扭矩设定点信号562可由监督控制266和/或驱动单元295(和/或另一控制器)设定。较佳地,泵控制电路210包含确定啮合齿轮齿对之间的扭矩差动的扭矩反馈电路545。在一些实施例中,扭矩差动可基于齿轮尺寸、马达电流(例如马达电流的差)和/或啮合齿轮齿对52、72彼此接触时一个或两个马达电流的改变来计算。例如,扭矩差动可通过监测来自马达41的马达电流543a及来自马达61的马达电流543b且计算两个马达之间的差动扭矩来确定。差动扭矩反馈信号547可基于啮合齿轮齿对52、72彼此接触时马达电流的差和/或一个或两个马达电流的瞬时和/或平均改变。在其他实施例中,扭矩差动反馈信号可基于直接扭矩量测(例如机械和/或电性)、电压量测、功率量测和/或可提供啮合齿轮齿对52、72之间的扭矩差动的指示的某一其他类型的量测。在一些实施例中,差动扭矩反馈信号可由运动控制器530计算。例如,马达电流543a及543b可输入至运动控制器530,运动控制器530接着计算差动扭矩反馈信号。
46.当控制模式信号544对应于同步化扭矩操作模式时,控制模式开关540选择差动扭矩调整信号564且输出对应于差动扭矩调整信号564的差动需求调整信号542。如图5中所见,运动控制器530接收差动需求调整信号542且可基于差动需求调整信号542来调整一个或两个速度需求信号536a及536b。即,基于泵需求信号536及差动需求调整信号542,运动控制器530产生差动速度需求且基于差动速度需求来将个别泵需求信号536a及536b分别输出至马达控制器570及580。在按同步化扭矩操作模式操作泵10期间,同步化扭矩控制器560调整差动扭矩调整信号564以使差动扭矩反馈信号547维持在差动扭矩设定点信号562。因此,在同步化扭矩操作模式中,差动速度需求不是具有固定值,而是被调整以动态同步化齿轮泵10的一对或多对啮合齿轮齿52、72之间的扭矩。较佳地,差动速度需求被调整成使得随着齿轮50、70转动且彼此接触,差动扭矩被控制为预定值和/或在预定范围内(例如从1nm至10nm内的值和/或从1nm至10nm的范围,其取决于泵的配置和/或操作条件)。差动扭矩值可对应于瞬时值、平均值和/或某一其他计算值。较佳地,分别对应于齿轮50、70中的一者的速度需求信号536a或536b基于差动扭矩调整信号564而被设定为高于另一者。在一些实施例中,扭矩调整的方向(例如,齿轮50的速度需求快于齿轮70或齿轮70的速度需求快于齿轮50)可视需要改变。例如,调整方向可在每次起动泵10时、在起动泵10预定次数之后、基于运行小时数或对例如齿轮齿52、72的各侧上的甚至磨损(均匀磨损)的某一其他准则来交替。调整方向指示符可以是单独信号和/或按某一方式嵌入至差动扭矩调整信号564中。例如,差动扭矩调整信号564的符号“+”或
“‑”
可对应于哪一齿轮具有更快速度需求。同步化扭矩控制器560、控制模式开关540和/或运动控制器530可包含硬件和/或算法、指令组和/或程序代码,其可由处理器执行以在按同步化扭矩操作模式操作泵10期间动态调整速度需求信号536a及536b中的一者或两者。
47.在一些例示性实施例中,由同步化扭矩控制器560用于控制差动速度需求的差动扭矩设定点信号562可基于所需滑移因子(或滑移系数或滑移流动系数)、操作条件(例如压
力、流量、温度)、齿轮参数(例如齿轮轮廓、齿轮齿的机械应力极限或某一其他齿轮参数)、马达参数(例如电流、电压、功率或某一其他马达参数)和/或某一其他操作或物理参数。在一些实施例中,针对1:1的齿轮比,差动速度需求可受控于例如0.0001度/秒至0.001度/秒的范围内。在一些实施例中,取决于泵10的配置,差动速度需求可被控制以产生1nm至10nm之间的范围内的差动扭矩,更佳地在1nm至6nm的范围内,且甚至更佳地在2nm至4nm之间。在一些实施例中,取决于泵10的配置,差动速度需求可被控制以提供约3nm
±
0.1nm的平均差动扭矩。在一些实施例中,差动扭矩反馈信号547可基于监测一对或多对代表性啮合齿轮齿之间的扭矩差。较佳地,代表性对之间的差动扭矩可基于差动扭矩设定点信号562来控制,差动扭矩设定点信号562被设定成使得剩余啮合齿轮齿对的差动扭矩的方差(例如归因于制造公差和/或工艺方差的扭矩方差)落入可接受差动扭矩范围内。例如,差动扭矩设定点信号562可被设定(例如3nm)使得控制代表性对的差动扭矩将意谓剩余啮合齿轮齿的差动扭矩将落入可接受范围内(例如在1nm至6nm之间)。在一些实施例中,可监测所有啮合齿轮齿对之间的差动扭矩。在一些实施例中,用于控制差动速度需求的所监测的扭矩值可以是瞬时和/或平均差动扭矩值。
48.在一些实施例中,同步化扭矩控制器560可基于从对应于所有啮合对和/或代表性对的齿轮50、70的一或多个回转的数据导出的平均扭矩反馈信号来动态调整差动速度需求。例如,在一些实施例中,同步化扭矩控制器560可被配置成基于表示所有啮合对和/或代表性对的一个或多个回转上的差动扭矩的平均值的差动扭矩反馈信号547来输出差动扭矩调整信号564。然而,尽管基于平均差动扭矩来动态调整差动速度需求提供相较于固定差动速度需求的优点,但至少一些个别啮合齿轮齿对的差动扭矩值仍可能落于可接受极限外(例如归因于齿轮齿尺寸的变动和/或工艺变动和/或由于某一其他原因)。即,即使啮合对(或(若干)代表性对)的平均差动扭矩落于可接受极限内,但一些个别啮合齿轮齿对之间的差动扭矩仍可能落于可接受极限外(例如小于1nm和/或大于10nm)。
49.因为可存在差动扭矩值的这种变动,所以在一些实施例中,可监测各对啮合齿轮齿52、72之间的差动扭矩且可在泵10的操作期间逐齿动态调整速度需求信号536a、536b中的一者或两者。例如,在一些实施例中,运动控制器530(和/或另一控制器)可被配置成逐齿使所有啮合对的差动扭矩保持于可接受极限内。较佳地,差动扭矩调整信号564由运动控制器530(例如经由差动需求调整信号542)用于产生速度需求信号536a及536b的中间或基本差动速度需求。类似于上文所讨论的差动速度需求,基本差动速度需求可基于泵需求信号536及差动扭矩调整信号564(例如经由差动需求调整信号542)且可对应于啮合齿的平均差动扭矩。然而,在基本差动速度需求用于产生马达41的基本速度信号及马达61的基本速度信号之后,可基于逐齿调整来进一步修改马达41及61的基本速度信号以产生分别输出至马达控制器570及580的个别速度需求信号536a及536b。即,当泵10操作时,马达41和/或马达61的基本速度信号基于个别齿数据(例如预定数据)来逐齿修改以产生速度需求信号536a及536b。在一些实施例中,对马达41和/或马达61的基本速度信号的逐齿调整可基于泵10的工厂校准和/或在役校准。校准数据可与个别齿尺寸、诸如马达电流及电压之类的操作数据和/或诸如压力、流量、滑移因子等等之类的处理数据相关。对马达41和/或马达61的基本速度信号的逐齿调整可储存于数据结构(诸如(例如)lut或某一其他结构)中。较佳地,用于产生速度需求信号536a、536b中的一者或两者的逐齿调整校正各对啮合齿轮齿在它们会聚于
啮合区域78中时的扭矩值的偏差。
50.较佳地,为逐齿调整扭矩方差,运动控制器530(和/或另一电路)被配置成基于逐齿调整数据分别经由速度需求信号536a、536b来对马达41、61的角速度作出非常小增量调整和/或瞬间调整。为此,在一些实施例中,运动控制器530(和/或另一控制器)可接收马达41、61的位置和/或角速度的高分辨率反馈(例如经由高分辨率编码器)。例如,传感器231a和/或231b可将位置和/或角速度的高分辨率反馈提供至各自马达控制器570及580。较佳地,运动控制器530(和/或另一控制器)可从马达控制器570及580接收位置反馈信号232a及232b中的一者或两者(和/或速度反馈)且确定各齿相对于参考点的位置和/或根据位置反馈信号232a及232b计算马达41、61的角速度。较佳地,运动控制器530(和/或另一控制器)可经由(例如)速度需求信号536a和/或536b按
±
0.001弧度/秒的增量调整马达角速度及因此调整齿轮角速度。
51.较佳地,运动控制器530(及/或另一控制器)可使各对啮合齿轮齿的位置与该对的逐齿调整相关。随着各对啮合齿轮齿进入啮合区域78(如由例如位置反馈信号232a和/或232b所确定),运动控制器530(和/或另一控制器)可视情况使用逐齿调整数据来瞬间修改马达41及61的基本速度信号中的一者或两者以产生速度需求信号536a及536b的最终差动速度需求。例如,马达41和/或马达61的基本速度信号可在啮合齿轮齿对位于啮合区域78中的时间期间暂时提升或降低。在啮合齿轮齿对52、72开始离开啮合区域78之后,马达41和/或61的经修改基本速度信号被重设为基本速度信号值且本处理对下一对啮合齿轮齿52、72重复。表1展示由运动控制器530(和/或另一控制器)对各基本速度信号的逐齿调整的示例。
52.表1
[0053][0054][0055]
在表1中,对马达41和/或马达61的基本速度信号的逐齿调整按正或负整数增量给出。整数(例如0、
±
1、
±
2、
…
)可对应于速度百分比改变(例如,各整数值可表示例如速度需求的0.01%增量改变)、角速度改变(例如,各整数值表示例如0.001弧度/秒增量改变)或各自马达的基本速度信号的某一其他增量改变。
[0056]
图6a绘示泵10的例示性操作的表1中所展示的调整的例示性曲线图600。图6b绘示曲线图600的x轴的啮合齿对mp1至mpn的界面。如图6a中所见,马达41的基本速度信号610可
处于适合于对应于泵需求信号536及差动扭矩调整信号564的所需流量和/或压力的值。在图6a中,因为马达41(参阅表1)对所有啮合对mp1至mpn的调整是0,所以基本速度信号610将为马达41的速度需求信号536a。为了解释及清楚,马达41的基本速度信号610展示为恒定的。然而,在实际操作中,马达41的基本速度信号610及因此速度需求信号536a可基于泵需求信号536和/或差动扭矩调整信号564来变动。如图6a中所见,马达61的基本速度信号620(参阅虚线)亦处于适合于对应于泵需求信号536及差动扭矩调整信号564的所需流量和/或压力的值。较佳地,马达41的基本速度信号610与马达61的基本速度信号620之间的差动速度需求640对应于差动扭矩调整信号564。随着各啮合对mp1至mpn进入啮合区域78,将逐齿调整(参阅表1及曲线图600的y轴)添加至马达61的基本速度信号620或从马达61的基本速度信号620减去以产生对应于速度需求信号536b的速度需求信号630。较佳地,表1及曲线图600中所展示的逐齿调整可对应于百分比改变、角速度改变或某一其他转动或位置改变。尽管表1及曲线图600中所展示的调整展示为整数调整,但调整可呈任何格式。在一些实施例中,lut可包含用于速度需求信号(例如速度需求信号536a、536b)的实际速度信号值而非对基本速度信号的调整。因此,在一些较佳实施例中,运动控制器530(和/或另一控制器)可被配置成逐齿调整各对啮合齿轮齿52、72之间的差动扭矩的变动。
[0057]
在一些实施例中,为最小化逐齿调整,差动扭矩设定点信号562可被设定成使得平均差动扭矩值处于可接受差动扭矩范围的中间(例如对应于1nm至5nm的可接受扭矩范围内的3nm的扭矩的设定点)。逐齿调整较佳地在差动扭矩值落于可接受扭矩范围外时进行和/或在一定程度上使差动扭矩值保持于可接受扭矩范围内。在上述实施例中,马达41的基本速度信号未基于逐齿调整来修改。然而,在其他实施例中,马达41的基本速度信号可代替马达61的基本速度信号或与马达61的基本速度信号一起修改。通过对基本速度信号执行逐齿调整,归因于例如齿尺寸的不均匀性的接触力的变动(或由某一其他原因引起的变动)可被最小化,使得接触力保持于所需范围内。当然,用于提供所需差动速度需求和/或逐齿调整的上述控制方案是例示性的且可使用其他控制方案。
[0058]
在一些实施例中,同步化扭矩控制器560可替代运动控制器530来提供逐齿调整。例如,由同步化扭矩控制器560输出的差动扭矩调整信号564可包含逐齿调整的信息。接着,逐齿调整信息可由控制模式开关输出于差动需求调整信号542中。较佳地,同步化扭矩控制器560和/或运动控制器530(和/或另一控制器)接收差动需求调整信号542中的逐齿调整信息且使其与位置反馈信号232a及232b中的一者或两者相关以确定差动速度需求的逐齿调整。
[0059]
同步化扭矩控制器560和/或运动控制器530(和/或另一控制器)可包含用于提供上述逐齿调整的一个或多个lut。例如,可使用一个以上lut且不同lut可由适当控制器基于泵的大小、操作的方向、泵的操作速度、泵应用(例如持续操作、液压设备操作、被抽吸的流体的类型(例如磨料、液压、水等等)或某一其他应用)和/或一些其他准则来存取。较佳地,用于逐齿调整的(若干)lut可基于操作条件来重新校准(例如自动地)。例如,(若干)lut可基于操作小时数、起动次数、差动扭矩(例如对应于接触力)超过阈值或由于某一其他原因而重新校准。在一些情况中,当差动扭矩超过所需范围(例如对应于小于1nm和/或大于6nm的扭矩值)时,可引发警报。警报可在lut的任何重新校准之前和/或在调整超过阈值(例如进一步调整不可行和/或将使泵控制不稳定时的阈值)时引发。在一些实施例中,对应于差
动扭矩的第一阈值可引发重新校准,且大于第一阈值的第二阈值可引发警报。
[0060]
在一些上述例示性实施例中,泵10被控制成使得啮合齿轮齿对之间存在接触。然而,可存在其中期望对应啮合齿轮齿对之间存在间隙的情境。例如,在泵的启动期间,被抽吸的流体(例如液压系统中的液压流体)可不处于操作温度。在这种情况中,低效运行泵(例如具有过度回流或泄漏)可比更高效操作泵时更快加热流体。类似地,即使在泵的正常操作期间,可存在其中期望低效运行泵的情境,例如在其中流体的温度由于某一原因而下降的情况中。亦可在抽吸磨料流体时期望间隙以最小化齿上的磨损。
[0061]
在一些实施例中,泵控制电路210可包含同步化位置控制器550,其提供可用于精确定位泵10的马达和/或齿轮的间隙调整信号554。当将控制模式信号544设定为位置模式时,控制模式开关540选择来自同步化位置控制器550的间隙调整信号554且接着输出基于间隙调整信号554的差动需求调整信号542。运动控制器530使用泵速度需求信号536及差动需求调整信号542来精确控制马达41、61的位置(例如经由马达控制器570及580)以控制对应啮合齿轮齿对之间的间隙宽度,同时维持所需流量和/或压力。较佳地,在同步化位置操作模式中,运动控制器530基于差动需求调整信号542来瞬间调整速度需求信号536a和/或536b。然而,不同于被设计以使用对应啮合齿轮齿对之间的预定差动扭矩产生和/或维持接触的同步化扭矩操作模式,同步化位置操作模式被设计成产生和/或维持对应啮合齿轮齿对之间的预定间隙宽度。较佳地,间隙宽度可在从大于零(例如,间隙宽度接近零但不产生接触)至对应齿轮齿之间的空隙的1/2的范围内。在一些实施例中,间隙宽度可以是零(例如恰好几乎没有或没有接触力地接触)。
[0062]
在一些实施例中,泵控制电路210可包含用于计算对应啮合齿轮齿对之间的间隙宽度的间隙反馈电路555。较佳地,间隙反馈电路555从例如位置传感器231a及231b接收马达41、61和/或齿轮50、70的角位置的精度反馈。例如,在一些例示性实施例中,位置传感器231a及231b可将对应于马达41/齿轮50的角位置反馈信号232a及对应于马达61/齿轮70的角位置反馈信号232b分别提供至间隙反馈电路555。在一些实施例中,间隙反馈电路555(和/或另一电路,诸如(例如)马达控制器570及580)可基于位置反馈信号232a、232b来确定齿轮50中的至少一个齿轮齿52相对于齿轮70中的至少一个齿轮齿72的位置。较佳地,相对位置可确定为例如在+/-0.0010
°
内或在+/-0.0065
°
内。在一些实施例中,位置传感器231a、231b亦可量测和/或计算马达/齿轮的轴的角速度。
[0063]
较佳地,位置传感器231a及231b根据一个或多个参考点来校准以量测各齿轮的角位置。例如,齿轮50上的一个或多个齿轮齿52的位置可与马达41的轴42上的360度转动位置相关,和/或一个或多个齿轮齿72的位置可与马达61的轴62上的360度转动位置相关。可视需要设定一个或若干参考点。图4中针对齿轮50识别标示0度、90度、180度及270度的例示性参考点。类似地,亦针对齿轮70识别标示0度、90度、180度及270度的例示性参考点。如图4中所见,齿轮70的参考标示可以是齿轮50的参考标示的镜像。在图4的例示性实施例中,各齿轮50、70上的齿52、72的0度参考标示可对应于垂直于泵的流动轴的轴,其中0度参考标示面向泵10的啮合区域78。齿轮50、70的180度标示可位于离开啮合区域78的一侧。各齿轮的90度及270度标示可平行于流动轴,其中各自齿轮50、70的90度标示定位于端口24侧且各自齿轮50、70的270度标示定位于端口22侧。当然,参考点及度数标示的配置不是限制性的,而是可使用任何所需配置。例如,一个或若干参考点可以是安置于马达(例如轴)、泵(例如壳体)
或其他固定参考物的任何组合上的一个或若干任何固定点。较佳地,泵10包含用于精确追踪各自马达转子46、66及因此附接齿轮50、70的转动位置的一个或两个位置传感器231a、231b。较佳地,位置反馈信号232a及232b可使一个或多个齿轮齿52、72的位置与轴42、62上的360度位置相关。
[0064]
在一些实施例中,位置传感器231a、231b可以是编码器,诸如(例如)光学编码器、磁编码器或可量测马达41、61的转子46、66和/或齿轮50、70的位置的另一类型的编码器。在一些实施例中,位置传感器231a、231b可将齿轮50、70上的一个或多个齿52、72(或其他参考点)的角位置分别量测为在例如+/-0.0010
°
至+/-0.0065
°
的范围内。在图4的情况中,当轴固定时,传感器231a、231b可被安置成量测转子46、66和/或齿轮50、70相对于马达41、61的各自轴42、62的角位置。在一些实施例中,可使用额外位置传感器来监测转子46、66及齿轮50、70。在一些实施例中,位置传感器231a、231b可量测转子46、66和/或齿轮50、70相对于泵壳体上的固定点的角位置。在一些实施例中,位置传感器231a、231b亦可量测和/或计算转子/齿轮相对于各自轴(或泵壳体上的固定点)的角速度。较佳地,间隙反馈电路555(和/或另一电路,诸如(例如)马达控制器570及580)包含硬件和/或算法、指令组和/或程序代码,其可由处理器执行以基于位置反馈信号232a、232b来使各自流体驱动器40、60的各齿轮50、70的至少一个突起和/或凹口(例如齿轮齿52、72)的位置与参考点相关和/或彼此相关。
[0065]
较佳地,同步化位置控制器550输出基于间隙反馈信号234与间隙设定点552之间的差的间隙调整信号554。在一些实施例中,同步化位置控制器可包含lut或其他数据结构、比例电路、pi电路、pid电路和/或输出校正间隙反馈信号234与间隙设定点552之间的差的信号的某一其他控制器或电路。当在同步化位置操作模式中时,运动控制器530较佳地基于对应于间隙调整信号554的差动需求调整信号542来控制一个齿轮相对于另一齿轮的位置。例如,运动控制器530可被配置成在齿轮泵10的操作期间动态同步化一对或多对啮合齿轮齿52、72之间的相对位置以产生和/或维持预定间隙宽度。较佳地,基于差动需求调整信号542,运动控制器530调整速度需求信号536a及536b的差动速度需求以控制间隙宽度。较佳地,对应齿轮齿之间的相对位置可基于一个齿上的参考点与另一对应齿上的参考点之间的距离来建立。
[0066]
在例示性实施例中,间隙反馈电路555(和/或另一电路)可被配置成产生对应于一对或多对啮合齿轮齿52、72的间隙宽度g(参阅图7)的间隙反馈信号234。例如图7中所见,在一些实施例中,间隙反馈电路555可被配置成追踪齿轮50、70中的每一个上的一个或多个齿的冠部的至少中心(下文中称为点c)(或某一其他参考点)及齿轮50、70中的每一个上的一个或多个根部的根部的中心(下文中称为点r)(或某一其他参考点)。较佳地,间隙反馈电路555可追踪至少一对啮合齿轮齿52、72,其具有该对的一个齿上的参考点c及该对的另一齿上的参考点r。当然,参考点不限于齿的冠部及根部的中心且齿轮上的其他位置可用作参考点。然而,为了简洁及清楚,展示其中参考点是点c及r的例示性实施例。
[0067]
针对一对或多对啮合齿轮齿52、72,基于位置反馈信号232a、232b,间隙反馈电路555可追踪各自齿轮上的参考点c及r且可计算对置齿轮齿面之间的距离以确定间隙宽度g。例如,随着齿轮50、70转动,驱动位置控制器550可确定对应于各自啮合齿轮齿对的一个或多个参考点对c及r相对于轴46、66上的360度角位置(例如上文所讨论)的角位置和/或点c与r之间的相对距离。较佳地,间隙反馈电路555已知齿轮尺寸(齿轮大小、齿轮齿尺寸等
等)。例如,齿轮尺寸可储存于数据结构(例如lut)或间隙反馈电路555可存取的某一其他数据结构中。基于点对c及r彼此最靠近时的它们之间的角位置和/或相对距离,同步化位置控制器550(和/或运动控制器530和/或另一电路)可使用齿轮尺寸信息来计算齿对的对置齿轮面之间的距离以确定齿面之间的间隙宽度g。
[0068]
较佳地,传感器231a、231b可精确追踪对应于一对或多对啮合齿轮齿52、72的一个或多个参考点对c及r的位置。例如,在一些实施例中,传感器231a、231b可包含具有每回转100,000至四百万的范围内的计数分辨率的高分辨率编码器,其可取决于齿轮设计及马达的rpm。较佳地,驱动位置控制器550被配置成接收经由传感器231a、231b的马达41、61及因此齿轮50、70的位置和/或角速度的反馈。较佳地,传感器231a、231b(例如编码器)的分辨率足够高,使得位置数据不损失。即,若传感器分辨率低于泵的操作速度,则位置反馈电路可能漏失来自被追踪的齿的信息,诸如(例如)一个或多个脉冲。较佳地,在其中传感器231a、231b是编码器的实施例中,编码器计数等于或大于对应于最快泵速度的反馈计数值的1.5倍。
[0069]
较佳地,当将控制模式信号544设定为同步化位置操作模式时,差动需求调整信号542对应于间隙调整信号554。在一些实施例中,同步化位置控制器550被配置成使得当间隙反馈信号234偏离间隙设定点信号552(例如偏离预定量)时,间隙调整信号554基于偏差来改变。例如,同步化位置控制器可提供间隙调整信号554的改变,其由运动控制器530(例如经由差动需求调整信号542)用于调整速度需求信号536a及536b中的一者或两者,直至间隙反馈信号234匹配间隙设定点552和/或在间隙设定点552的预定量内。间隙反馈信号234可基于一对或多对代表性啮合齿轮齿之间的间隙宽度、基于所有啮合对之间的平均间隙宽度和/或基于逐齿计算的间隙宽度。
[0070]
在同步化位置操作模式期间,运动控制器530基于泵速度需求信号536来设定速度需求信号536a及536b,使得差动速度需求是零(例如,速度需求信号536a及536b两者具有相同值)。即,马达41、61(及因此齿轮50、70)按相同齿速度转动。当一个或若干对应啮合齿轮齿对之间的间隙宽度g偏离间隙设定点信号552(例如偏离预定量)时,同步化位置控制器550可提供间隙调整信号554的适当调整,其由运动控制器530经由差动需求调整信号542来接收。运动控制器530接着视情况增大速度需求信号536a或536b和/或减小另一速度需求信号536a、536b,使得差动速度需求在预定瞬间时段内非零。较佳地,预定瞬间时段基于齿轮尺寸。取决于齿轮尺寸,预定瞬间非零时段可(例如)在具有高分辨率编码器的速度传感器上的1个计数至3个计数的范围内。在一些实施例中,预定瞬间时段可在0.001秒至0.005秒的范围内。一旦实现了所需间隙宽度g,差动速度需求可由运动控制器530再次设定为零。
[0071]
如上文所讨论,间隙反馈信号234可基于齿轮50、70转动时(例如代表性对或所有对的)间隙宽度g的平均值。当控制至间隙宽度g的平均值时,各对啮合齿轮齿52、72之间的瞬时间隙宽度g可归因于(例如)齿轮尺寸的不均匀性(或由于某一其他原因)而大于或小于平均值。因此,在一些实施例中,类似于同步化扭矩模式,运动控制器530可逐齿控制间隙宽度g以考虑齿轮尺寸的变动。例如,与基于间隙调整信号554(经由差动需求调整信号542)来调整速度需求信号536a和/或536b一起,运动控制器530可包含lut和/或其他数据结构,其提供对速度需求信号536a和/或536b的进一步调整以逐齿调整间隙宽度g(例如考虑齿尺寸的变动)。本领域技术人员应了解,间隙宽度g的逐齿调整及lut(和/或其他数据结构)类似
于差动扭矩的逐齿调整及lut(和/或其他数据结构)。因此,为简洁起见,省略逐齿调整的详细描述。在一些实施例中,同步化位置控制器550可经由间隙调整信号554来提供逐齿调整。
[0072]
在相关技术系统中,一般不期望齿轮之间的间隙,因为其引起更多回流或流体滑移,这意谓滑移因子或滑移流动系数(流体滑移的度量)相对较高且泵因此低效。然而,在本公开的例示性实施例中,泵可按同步化位置操作模式操作,其中间隙宽度g(及因此滑移流动系数或滑移系数)可基于诸如流体密度、粘度、温度、压力、体积流量和/或流体的其他性质之类的参数来变动。例如,在闭环系统中,工作流体(例如液压油或液压流体、水或某一其他工作流体)可小于最佳工作温度和/或粘度。通过按高滑移系数(例如6%或更大的滑移系数)运行泵,工作流体可加热,这可以降低粘度。尽管一般不期望按高滑移系数低效操作泵,但在一些情况中,可更期望按高滑移系数操作以使流体系统尽可能快地升高至操作温度,例如在其中工作流体的粘度相对较高的情境中(例如在抽吸操作起动时或若泵在冷环境中操作)。在这种情况中,使用啮合齿轮齿对之间的间隙来操作泵将归因于泵的低效操作而升高工作流体的温度。
[0073]
较佳地,间隙宽度g可从略大于零变动至齿之间的空隙(一个齿的冠部位于另一齿的根部的中心)的1/2的最大值。在例示性实施例中,间隙宽度g可以是零,其中齿轮几乎没有或没有接触力地彼此恰好接触。较佳地,运动控制器530(或另一控制器)可基于(例如)工作流体的温度、泵和/或系统启动序列、操作模式(启动、正常、关闭)和/或某一其他准则来变动啮合齿轮齿对52、72之间的间隙宽度g。例如,间隙宽度g可在启动时处于其最大值(一个齿轮的齿的冠部准确居中于对置齿轮的根部中间)且缓慢闭合直至产生接触且启动序列结束。在另一方案中,间隙宽度g可在工作流体的温度下降至低于预定温度时开始打开且随着流体温度开始上升而再次闭合。较佳地,运动控制器530(和/或另一控制器)被配置成接收工作流体的温度(图中未展示)的反馈。在正常操作期间,若工作流体的温度下降至低于预定值,则运动控制器530(或另一控制器)可基于温度来打开间隙宽度g以增大滑移系数且加热工作流体。因此,本公开的例示性实施例在泵的操作期间允许可变滑移系数。
[0074]
应注意,间隙宽度g关于回流路径中的限制。显然,若齿轮齿的一侧面与对置齿轮接触,则齿轮齿的另一侧面将具有对应于齿之间的全空隙的间隙。然而,回流路径看见的间隙是零(或接近零),即,回流路径由于一组齿面接触而受阻(或几乎受阻)。较佳地,当传感器231a、231b是编码器时,运动控制器530可基于编码器计数来递增控制间隙宽度g。较佳地,各增量改变(「偏移」)表示对应于啮合齿之间的空隙的编码器计数的整数。例如,若各编码器计数表示偏移且存在对应于啮合齿轮齿对的齿之间的空隙的20个编码器计数,则控制器可在0的偏移(其可对应于其中齿轮接触的点)与10的偏移(其表示其中一个齿轮的冠部的中心(例如点c)与另一齿轮的根部的中心(例如点r)对准的点)(最大间隙宽度g)之间控制。当然,0的偏移可表示最大间隙g且10表示齿轮接触的点。若各偏移表示两个编码器计数,则在上述情景中,最大偏移将是5。
[0075]
在一些实施例中,间隙宽度g可被控制成使得间隙宽度g是零但几乎无或无接触力(本文中亦称为“最小间隙模式”)。在最小间隙模式中,一个齿轮的位置被控制成使得其齿恰好与对置齿轮的齿接触。然而,几乎不或不施加力来维持接触。因此,因为无接触力,所以追踪齿52、72的位置以确保存在接触,而非使用诸如(例如)马达电流之类的其他反馈。当然,诸如(例如)马达电流之类的其他反馈仍可用于确保一个齿轮不对另一齿轮施加太大
力。
[0076]
在最小间隙模式中,同步化位置控制器550较佳地使用处于零的间隙宽度设定点信号552。齿之间的接触通过追踪齿的位置(例如点c及r)且基于所追踪的位置及齿轮的已知尺寸确定齿轮何时接触来建立。替代地或除追踪位置以外,可使用上文相对于接触操作模式所讨论的其他反馈。在一些例示性实施例中,预定值可小于1nm或基于系统操作和/或架构的某一其他值。较佳地,若差动扭矩达到或超过预定值(例如1nm或更大或某一其他所需值),则一个或两个马达被控制成使得差动扭矩减小至零或接近零,例如通过略快地驱动较慢从动齿轮和/或通过略慢地驱动较快从动齿轮。较佳地,若差动扭矩超过预定阈值(例如6nm或某一其他所需值),则引发警报以指示控制可能存在问题。
[0077]
因为在最小间隙模式中对置齿轮齿之间存在接触,所以回流或滑移流动最小化且滑移系数比间隙宽度g大于零时更低。最小间隙模式表示泵的高效操作模式,因为回流或滑移流动最小化且几乎无来自一个或两个马达的额外能量用于维持接触力。可在其中期望最少齿轮磨损且可接受泵的一些低效(如下文将解释)的应用中期望最小间隙操作模式。例如,若泵10抽吸磨料流体,则可期望通过按最小间隙模式操作系统来最小化齿上的接触力。
[0078]
然而,最小间隙模式有时会导致低效泵操作,因为间隙会在高齿轮速度时偶尔形成于啮合齿轮齿对之间。尽管现代数字控制系统具有快速更新时间(时钟速度),但取决于泵速度及编码器分辨率(例如编码器每回转脉冲(ppr)计数),齿轮位置和/或齿轮角速度反馈值的准确度降低。因此,若编码器分辨率不够高,则间隙反馈电路555、同步化位置控制器550和/或运动控制器530(和/或另一控制器)可能无法在齿轮的较高角速度时准确追踪及控制齿轮齿的位置且可能无法维持齿轮间接触至少直至下一更新反馈信号。因此,在相对于编码器分辨率的高泵速度时,运动控制器530可归因于数字控制的限制(例如,编码器会跳过脉冲)而无法维持齿轮之间的接触,且此条件会一直存在至再次正确追踪齿轮齿的位置。如上文所指示,若不维持接触,则滑移因子增大且泵低效运行。此外,流体的温度将升高,这降低粘度且进一步降级泵的效率。因此,尽管最小间隙操作模式在编码器分辨率内操作泵时提供齿磨损与泵效率之间的平衡,但当在编码器分辨率的边缘处按高泵速度操作时,可较佳地按同步化扭矩操作模式(如上文所讨论)使用1nm或更大或基于系统操作和/或架构的某一其他所需值的扭矩设定点562来操作泵10。
[0079]
包含控制单元266和/或驱动单元295、泵控制电路210、阀控制电路220和/或控制器的任何其他组件的致动器控制系统200的全部或一部分可实施于(例如)硬件和/或可由处理器执行的算法和/或编程代码中。包含泵控制电路210的致动器控制系统200不受限于诸如图1中所展示的液压系统之类的应用。其他应用可包含野外航空、汽车、工业系统、医疗系统、农业或需要泵的任何其他应用。致动器控制系统200的控制单元266可取决于应用的类型而适当配置,且取决于应用是否需要用户输入,控制单元266可被配置成自操作者的输入单元276接收输入。输入单元276可以是(例如)控制面板,其可包含允许操作者与控制单元266通信的用户接口。例如,控制面板可包含:数字和/或模拟显示器,诸如(例如)led、液晶显示器、crt、触控屏幕、仪表和/或经由文字和/或图形用户接口(gui)来将信息传送至操作者的另一类型的显示器、指示器(例如开/关led、灯泡)及其等的任何组合;及数字和/或模拟输入器件,诸如触控屏幕、按钮、度盘、旋钮、控制杆、操纵杆和/或其他类似输入器件;计算机终端或控制面板,其具有键盘、键区、鼠标、轨迹球、触控屏幕或其他类似输入器件;
便携式计算设备,诸如膝上型计算机、个人数字助理(pda)、手机、数字绘图板计算机或某一其他便携式器件;或它们的组合。
[0080]
致动器控制系统200可被提供以专门控制流体驱动致动器系统1或其他应用。替代地,控制单元266可以是其中操作泵10的系统、机器或另一应用的另一控制系统的一部分和/或与其合作。致动器控制系统200(例如控制单元266)可包含中央处理单元(cpu),其执行诸如命令操作或预程序化例程、算法、指令和/或其他程序代码的各种程序。程序数据和/或例程可储存于存储器中。例程亦可储存于诸如硬盘(hdd)的储存媒体磁盘或便携式储存媒体上或可远程储存。然而,储存媒体不受限于上列媒体。例如,例程可储存于cd、dvd上,储存于flash内存、ram、rom、prom、eprom、eeprom、硬盘或与计算机辅助设计站通信的任何其他信息处理器件(诸如服务器或计算机)中。
[0081]
cpu可以是来自美国intel的xenon或core处理器或来自美国amd的opteron处理器,或可以是一般技术者将认知的其他处理器类型。替代地,一般技术者将认知,cpu可实施于fpga、asic、pld上或使用离散逻辑电路来实施。此外,cpu可实施为并行合作工作以执行命令操作或预程序化例程的多个处理器。
[0082]
致动器控制系统200(例如控制单元266)可包含用于与网络接口的网络控制器,诸如来自美国intel公司的intel ethernet pro网络接口卡。应了解,网络可以是诸如因特网的公用网络或诸如lan或wan网络的专用网或其任何组合且亦可包含pstn或isdn子网。网络亦可以是有线的(诸如以太网络)或可以是无线的(诸如蜂窝式网络,其包含edge、3g及4g无线蜂窝式系统)。无线网络亦可以是wifi、bluetooth或任何其他已知无线通信形式。致动器控制系统200(例如控制单元266)可经由有线或无线通信经由诸如键盘和/或鼠标的用户输入器件来自操作者接收命令。另外,控制单元266、驱动单元295、马达控制器570、580及阀控制器之间的通信可以是模拟的或经由数字总线且可使用诸如(例如)控制器局域网络(can)、以太网络、共同产业协议(cip)、modbus及其他熟知协议的已知协议。
[0083]
本公开中的控制器和/或模块的实施例可提供为硬线电路和/或计算机程序产品。作为计算机程序产品,产品可包含其上储存有指令的机器可读媒体,指令可用于对计算机(或其他电子器件)进行编程以执行处理。机器可读媒体可包含(但不限于)软盘片、光盘、光盘只读存储器(cd-rom)及磁光盘、rom、随机存取内存(ram)、可擦除可编程只读存储器(eprom)、电可擦除可编程只读存储器(eeprom)、场可编程门阵列(fpga)、专用集成电路(asic)、车辆识别模块(vim)、磁卡或光卡、闪存或适合于储存电子指令的其他类型的媒体/机器可读媒体。
[0084]
术语“模块”广义地是指软件、硬件或固件(或其任何组合)组件。模块通常是可使用(若干)指定输入来产生有用数据或其他输出的功能组件。模块可或可不为独立的。上文所讨论的控制器可包含一个或多个模块。
[0085]
尽管上述驱动-驱动实施例相对于包括具有齿轮齿的正齿轮的外部齿轮泵配置来描述,但应了解,本领域技术人员将易于认知,下文将描述的概念、功能及特征可易于适用于:具有其他齿轮配置(螺旋齿轮人字形齿轮或可适用于驱动流体的其他齿轮齿配置)的外部齿轮泵;具有各种齿轮配置的内部齿轮泵;具有两个以上原动机的泵;除电动马达以外的原动机,例如液压马达或其他流体驱动马达、内燃机、气体引擎或其他类型的引擎或可驱动流体排量部件的其他类似器件;及除具有齿轮齿的外部齿轮的外的流体排量部件,例如具
有齿轮齿的内部齿轮、具有突出部(例如凸块、延伸部、凸出部、突起、其他类似结构或其组合)的轮毂(例如圆盘、圆柱体、其他类似组件)、具有凹口(例如腔、凹陷、空隙或其他类似结构)的轮毂(例如圆盘、圆柱体或其他类似组件)、具有叶片的齿轮体或可在驱动时排出流体的其他类似结构。因此,为简洁起见,省略各种泵配置的详细描述。另外,本领域技术人员应认知,取决于泵的类型,接触(驱动-驱动)可有助于代替密封反向流动路径或与密封反向流动路径一起抽吸流体。例如,在特定内部齿轮转子泵配置中,两个流体排量部件之间的接触或啮合亦有助于抽吸陷留于对置齿轮的齿之间的流体。此外,尽管上述实施例包含具有外部齿轮配置的流体排量部件,但本领域技术人员应认知,取决于流体排量部件的类型,接触或啮合不受限于侧面与侧面接触,而是可位于一个流体排量部件上的至少一个突出部(例如凸块、延伸部、凸出部、突起、其他类似结构或其组合)的任何表面与另一流体排量部件上的至少一个突出部(例如凸块、延伸部、凸出部、突起、其他类似结构或其组合)或凹口(例如腔、凹陷、空隙或其他类似结构)的任何表面之间。
[0086]
流体排量部件(例如上述实施例中的齿轮)可完全由金属材料或非金属材料中的任何一个制成。金属材料可包含(但不限于)钢、不锈钢、阳极化铝、铝、钛、镁、黄铜及其各自合金。非金属材料可包含(但不限于)陶瓷、塑料、复合物、碳纤维及纳米复合材料。金属材料可用于(例如)需要坚固性以忍受高压的泵。然而,针对用于低压应用中的泵,可使用非金属材料。在一些实施例中,流体排量部件可由弹性材料(例如橡胶、弹性体材料)制成以(例如)进一步增强密封区域。
[0087]
替代地,流体排量部件(例如上述实施例中的齿轮)可由不同材料的组合制成。例如,主体可由铝制成且与另一流体排量部件接触的部分(例如上述例示性实施例中的齿轮齿)可由钢(针对需要坚固性以忍受高压的泵)、塑料(针对用于低压应用的泵)、弹性体材料或另一适当材料(基于应用的类型)制成。
[0088]
流体输送系统的例示性实施例可排出各种流体。例如,泵可被配置成抽吸液压流体、机油、原油、血液、液体药物(糖浆)、涂料、油墨、树脂、黏着剂、熔融热塑性塑料、柏油、沥青、糖蜜、熔融巧克力、水、丙酮、苯、甲醇或另一流体。如通过可被抽吸的流体的类型所见,泵的例示性实施例可用于各种应用中,诸如重型工业机器、航空应用、汽车应用、化学业、食品业、医疗业、商业应用、住宅应用或使用泵的另一工业。诸如以下的因素将在泵布置中发挥作用:流体密度、粘度、流体温度、应用的所需压力及流量、流体排量部件的配置、马达的大小及功率、物理空间考虑、泵的重量或影响泵配置的其他因素。经考虑,取决于应用的类型,上文所讨论的流体输送系统的例示性实施例可具有落于(例如)1rpm至5000rpm的大体范围内的操作范围。然而,在空气动力应用中,泵可具有6000rpm至12,000rpm或更大的操作范围。当然,这种范围不是限制性的且其他范围是可行的。
[0089]
另外,流体排量部件的尺寸可取决于泵的应用来变动。例如,当齿轮用作流体排量部件时,齿轮的圆形节距可在从小于1mm(例如尼龙的纳米复合材料)至工业应用中的数米宽的范围内。齿轮的厚度将取决于应用的所需压力及流量。
[0090]
尽管已参考特定实施例来揭示本发明,但可在不背离随附申请专利范围中所界定的本发明的范围及范畴的情况下对所描述的实施例进行诸多修改、更改及改变。因此,本发明不意欲受限于所描述的实施例,而是具有由以下申请专利范围及其等同物的语言界定的全范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1