用于行走马达的控制方法、工程机械、存储介质及处理器与流程
本申请涉及液压控制,具体涉及一种用于行走马达的控制方法、工程机械、存储介质及处理器。
背景技术:
1、拓荒机器人长期应用于坡道上的拓荒作业。在坡道上进行爬坡作业时,行走装置系统更大的驱动功率,需要将马达的速度档位切换至慢速档。现有技术中,只能通过人工来切换马达的速度,如果控制人员忘记切换马达档位,会造成爬坡无力的情况,进而影响行走安全。且每次爬坡换挡都需要人工检测,极大地增加了人力成本。
技术实现思路
1、本申请实施例的目的是提供一种用于行走马达的控制方法、工程机械、存储介质及处理器
2、为了实现上述目的,本申请第一方面提供一种用于行走马达的控制方法,应用于工程机械,工程机械包括依次通过供油管路连接的行走液压泵、行走马达、梭阀阀组以及压力油源控制阀组,其中,压力油源控制阀组包括电磁换向阀,梭阀阀组包括弹性组件,控制方法包括:
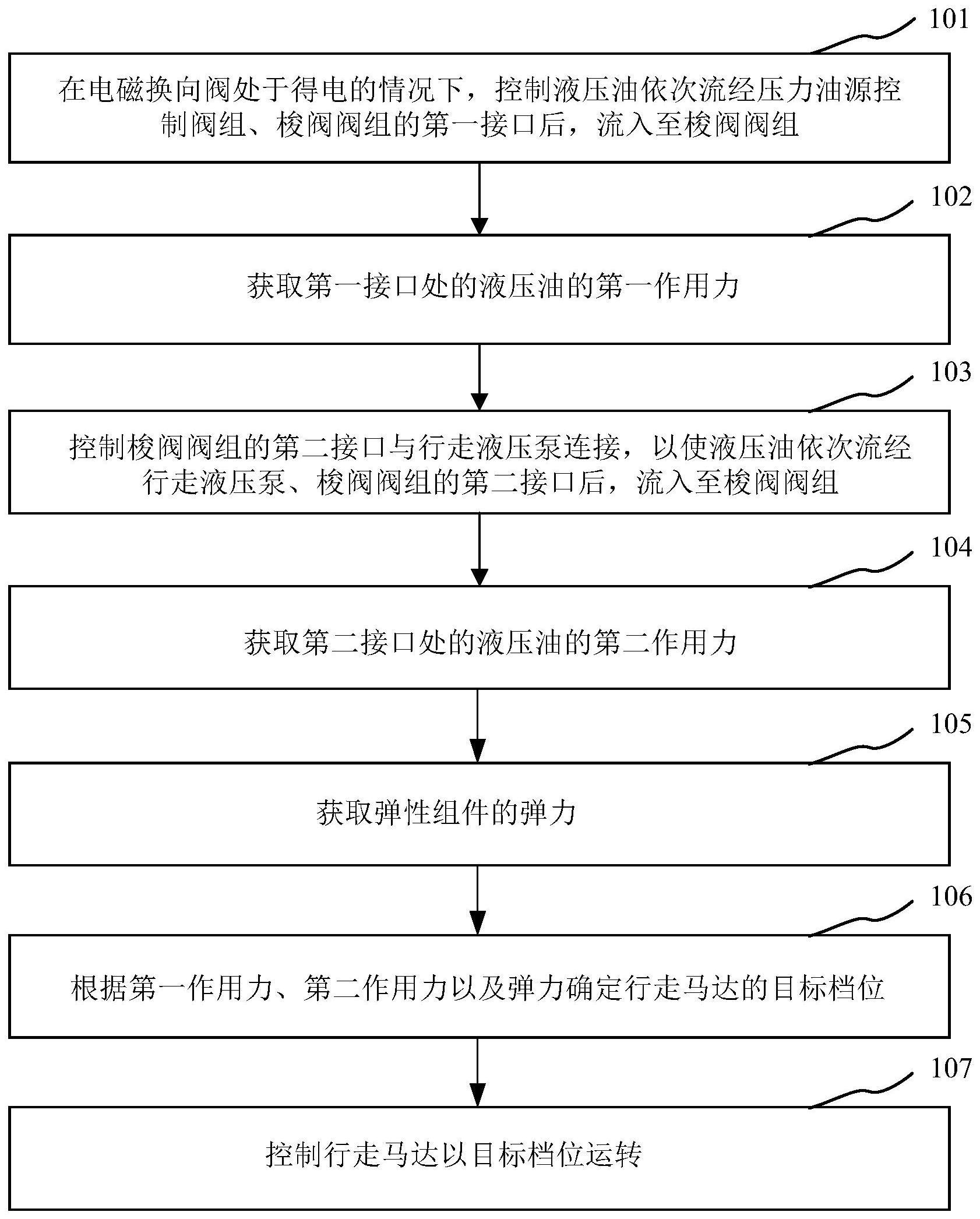
3、在电磁换向阀处于得电的情况下,控制液压油依次流经压力油源控制阀组、梭阀阀组的第一接口后,流入至梭阀阀组;
4、获取第一接口处的液压油的第一作用力;
5、控制梭阀阀组的第二接口与行走液压泵连接,以使液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组;
6、获取第二接口处的液压油的第二作用力;
7、获取弹性组件的弹力;
8、根据第一作用力、第二作用力以及弹力确定行走马达的目标档位;
9、控制行走马达以目标档位运转。
10、在本申请实施例中,目标档位包括第一目标档位和第二目标档位,根据第一作用力、第二作用力以及弹力确定行走马达的目标档位包括:在第二作用力与弹力的合力小于第一作用力的情况下,确定行走马达的目标档位为第一目标档位;在第二作用力与弹力的合力大于第一作用力的情况下,确定行走马达的目标档位为第二目标档位,其中,第一目标档位大于第二目标档位。
11、在本申请实施例中,工程机械还包括依次通过供油管路连接的变量活塞机构和液压油箱,控制行走马达以目标档位运转包括:在第二作用力与弹力的合力大于第一作用力的情况下,控制液压油在依次流经梭阀阀组的第二接口、变量活塞机构后流入液压油箱;确定行走马达的目标档位为第二目标档位;控制行走马达以第二目标档位运转。
12、在本申请实施例中,工程机械还包括依次通过供油管路连接的变量活塞机构和液压油箱,控制方法还包括:在电磁换向阀处于失电的情况下,控制液压油在依次流经梭阀阀组的第二接口、变量活塞机构后流入液压油箱;控制行走马达以第二目标档位运转。
13、在本申请实施例中,行走液压泵包括第一油路和第二油路,控制梭阀阀组的第二接口与行走液压泵连接,以使液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组包括:在行走马达处于以顺时针方向运转的情况下,控制第二接口与第一油路连接,以使第一油路中的液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组;在行走马达处于以逆时针方向运转的情况下,控制第二接口与第二油路连接,以使第二油路中的液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组。
14、在本申请实施例中,获取第一接口处的液压油的第一作用力包括:获取第一接口处的液压油的第一作用面积和第一压力;将第一作用面积和第一压力的乘积确定为第一作用力。
15、在本申请实施例中,获取第二接口处的液压油的第二作用力包括:获取第二接口处的液压油的第二作用面积和第二压力;将第二作用面积和第二压力的乘积确定为第二作用力。
16、本申请第二方面提供一种处理器,被配置成执行上述的用于行走马达的控制方法。
17、本申请第三方面提供了一种工程机械,包括:
18、依次通过供油管路连接的行走液压泵、行走马达、梭阀阀组以及压力油源控制阀组,其中,压力油源控制阀组包括电磁换向阀,梭阀阀组包括弹性组件;以及
19、上述的处理器。
20、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行上述的用于行走马达的控制方法。
21、上述技术方案,通过在电磁换向阀处于得电的情况下,控制液压油依次流经压力油源控制阀组、梭阀阀组的第一接口后,流入至梭阀阀组;获取第一接口处的液压油的第一作用力;控制梭阀阀组的第二接口与行走液压泵连接,以使液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组;获取第二接口处的液压油的第二作用力;获取弹性组件的弹力;根据第一作用力、第二作用力以及弹力确定行走马达的目标档位;控制行走马达以目标档位运转。采用上述技术方案,通过实现行走马达的运转速度的自动控制,无需人力控制,提高了行驶的安全性,降低了人力成本。
22、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于行走马达的控制方法,其特征在于,应用于工程机械,所述工程机械包括依次通过供油管路连接的行走液压泵、行走马达、梭阀阀组以及压力油源控制阀组,其中,所述压力油源控制阀组包括电磁换向阀,所述梭阀阀组包括弹性组件,所述控制方法包括:
2.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述目标档位包括第一目标档位和第二目标档位,所述根据所述第一作用力、所述第二作用力以及所述弹力确定所述行走马达的目标档位包括:
3.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述工程机械还包括依次通过供油管路连接的变量活塞机构和液压油箱,所述控制所述行走马达以所述目标档位运转包括:
4.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述工程机械还包括依次通过供油管路连接的变量活塞机构和液压油箱,所述控制方法还包括:
5.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述行走液压泵包括第一油路和第二油路,所述控制所述梭阀阀组的第二接口与所述行走液压泵连接,以使液压油依次流经所述行走液压泵、所述梭阀阀组的第二接口后,流入至所述梭阀阀组包括:
6.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述获取所述第一接口处的液压油的第一作用力包括:
7.根据权利要求1所述的用于行走马达的控制方法,其特征在于,所述获取所述第二接口处的液压油的第二作用力包括:
8.一种处理器,其特征在于,被配置成执行根据权利要求1至7中任意一项所述的用于行走马达的控制方法。
9.一种工程机械,其特征在于,包括:
10.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至7中任一项所述的用于行走马达的控制方法。
技术总结
本申请实施例提供一种用于行走马达的控制方法、工程机械、存储介质及处理器。包括:在电磁换向阀处于得电的情况下,控制液压油依次流经齿轮泵、压力油源控制阀组、梭阀阀组的第一接口后,流入至梭阀阀组;获取第一接口处的液压油的第一作用力;控制梭阀阀组的第二接口与行走液压泵连接,以使液压油依次流经行走液压泵、梭阀阀组的第二接口后,流入至梭阀阀组;获取第二接口处的液压油的第二作用力;获取弹性组件的弹力;根据第一作用力、第二作用力以及弹力确定行走马达的目标档位;控制行走马达以目标档位运转。采用上述技术方案,通过实现行走马达的运转速度的自动控制,无需人力控制,提高了行驶的安全性,降低了人力成本。
技术研发人员:金月康,曾利,黄斌,张永江,文天详
受保护的技术使用者:湖南中联重科应急装备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!