基于加速度计算的电子水泵转速测量方法和测量装置与流程
本发明涉及设备测量,尤其指一种基于加速度计算的电子水泵转速测量方法和测量装置。
背景技术:
1、电子水泵在开发、产线生产的过程中,测试都是必不可少的环节,水泵的电机转速是测试中非常重要的信息。通常会通过电控系统读取水泵的电机转速,但是很多时候并不具备测试条件,例如:并不知道电控系统完整的控制信息;或者需要外接线缆,但这容易破坏样件。所以,需要一种安装方便、通用性好、准确度高的测量方法。
2、目前,行业内有些采用基于加速度传感器振动测量的转速测量方法来进行测量,该测量方法虽然安装方便,但是测量后需要手动对频域信号峰值进行人工识别,而且没有进行谐波校验,整体效率低下、准确度也较低。
技术实现思路
1、本发明的目的在于提供一种基于加速度计算的电子水泵转速测量方法,能够对频域信息进行自动化的识别确认,以提高测量效率和准确度。
2、为了解决上述技术问题,本发明采用如下技术方案:一种基于加速度计算的电子水泵转速测量方法,其主要是利用加速度传感器测量电子水泵在运转过程中的壳体的振动,然后将获得的振动信号进行傅里叶变换以转化为频谱信号,再对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值,最终换算成转速。
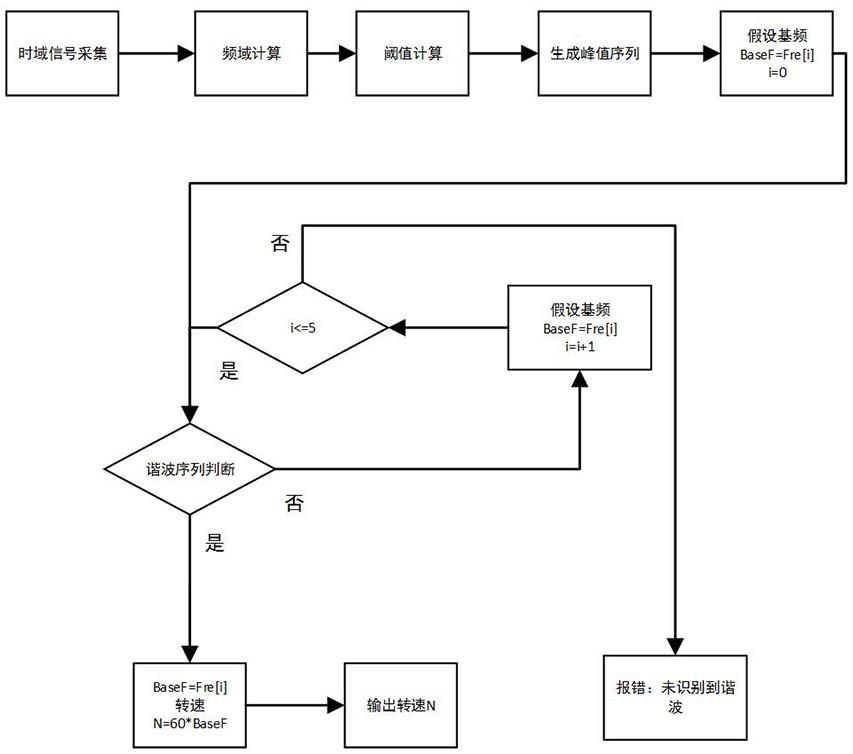
3、优选地,对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值,最终换算成转速的步骤如下:
4、s1、计算频谱信号中的阈值g:计算0~1000hz内的平均值g平均,并通过下式得到阈值g:
5、
6、其中,n为谱线数,n为阈值系数;
7、s2、计算大于阈值g的峰值来判断谐波序列:假设基波basef=fre[0],若2*basef、4*basef、6*basef、8*basef对应的频率至少有2个在峰值序列中,则basef成立,否则再假设basef=fre[1],以此类推。
8、s3、当basef成立时,通过下式换算成转速:n转速=basef*60。
9、更优选地,在步骤s2中,当谐波为2阶时,频率判断方式为:-a%<=(2*basef-fre[1])/fre[1]<=a%,则判断2*basef在序列中;
10、其中,basef为基波频率,h[]=1,2,4,6,8为主要谐波次数,f[]=h[1]*basef、h[2]*basef、h[3]*basef、h[4]*basef为谐波频率,fre[]=fre[0]、fre[1]、fre[2]、fre[3]、fre[4]为峰值序列对应的频率。
11、另外,本发明还提供一种基于加速度计算的电子水泵转速测量装置,其特征在于,包括:
12、加速度传感器,用于安装在电子水泵上并采集振动信号;
13、信号转换模块,用于将采集的振动信号进行傅里叶变换以转化为频谱信号;
14、数据处理模块,用于对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值;
15、结果生成模块,用于将排除频谱信号中的干扰峰值的数据换算成转速。
16、该装置采用上述的基于加速度计算的电子水泵转速测量方法来运行。
17、与现有技术相比,本发明实现了对频域信息进行自动化的识别确认,提高了电子水泵转速测量的效率和准确度。
技术特征:
1.基于加速度计算的电子水泵转速测量方法,其特征在于:利用加速度传感器测量电子水泵在运转过程中的壳体的振动,然后将获得的振动信号进行傅里叶变换以转化为频谱信号,再对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值,最终换算成转速。
2.根据权利要求1所述的基于加速度计算的电子水泵转速测量方法,其特征在于:对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值,最终换算成转速的步骤如下:
3.根据权利要求2所述的基于加速度计算的电子水泵转速测量方法,其特征在于:在步骤s2中,当谐波为2阶时,频率判断方式为:
4.一种基于加速度计算的电子水泵转速测量装置,其特征在于,包括:
5.根据权利要求4所述的基于加速度计算的电子水泵转速测量装置,其特征在于:采用权利要求1-3中任一项所述的基于加速度计算的电子水泵转速测量方法运行。
技术总结
基于加速度计算的电子水泵转速测量方法和测量装置,涉及设备测量技术领域,本发明主要是利用加速度传感器测量电子水泵在运转过程中的壳体的振动,然后将获得的振动信号进行傅里叶变换以转化为频谱信号,再对频谱信号进行自动化的识别确认,排除频谱信号中的干扰峰值,最终换算成转速。实现了对频域信息进行自动化的识别确认,提高了测量效率和准确度。
技术研发人员:游思归,陈少林,刘妮斯
受保护的技术使用者:湖南天雁机械有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!