平衡阀组、油缸控制系统和高空作业平台的制作方法
本申请属于高空作业,具体地,涉及一种平衡阀组、油缸控制系统和高空作业平台。
背景技术:
1、高空作业机械在作业时通过液压油缸驱动臂架进行各种操作。然而,液压油缸的每次启动和停止时,常常会伴随顿挫感,这种顿挫现象在油缸全伸或者全缩状态下最为明显,这种启动和停止带来的冲击,给操作者带来很不安全的体验。
技术实现思路
1、本申请的目的是提供一种平衡阀组、油缸控制系统和高空作业平台,以带来更好的臂架操作感受。
2、根据本申请的第一方面,提供了一种平衡阀组,包括:
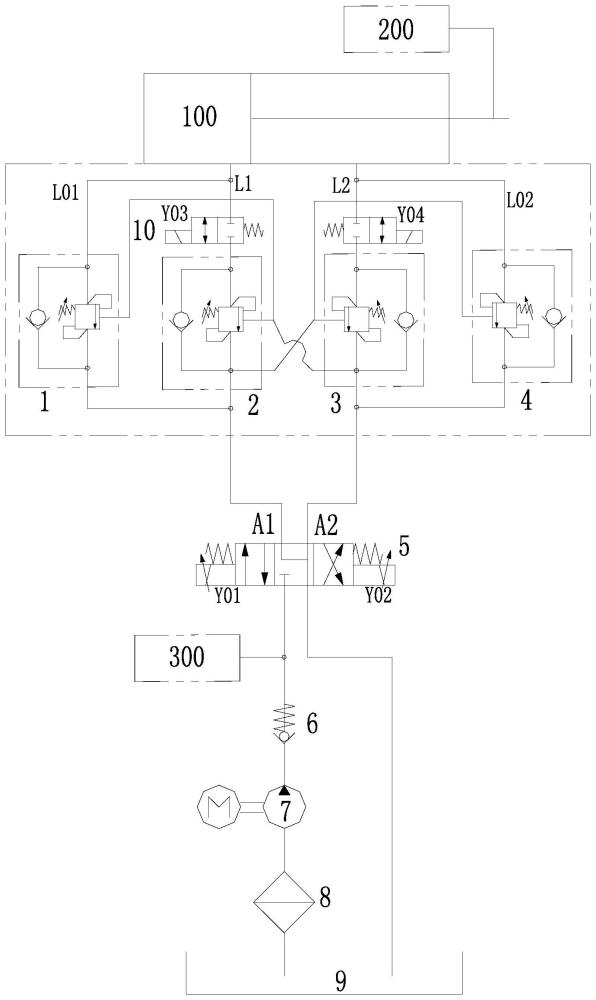
3、并联平衡阀a,包括并联设置在所述平衡阀组内的第一内部油路中的第一单平衡阀和第一截止阀以及设置在第一旁通油路中的第二单平衡阀,所述第一旁通油路并联连接于所述第一内部油路的两端油口;
4、并联平衡阀b,包括并联设置在所述平衡阀组内的第二内部油路中的第三单平衡阀和第二截止阀以及设置在第二旁通油路中的第四单平衡阀,所述第二旁通油路并联连接于所述第二内部油路的两端油口;
5、在所述平衡阀组内,所述第一内部油路和所述第二内部油路相互独立,所述第二单平衡阀的控制比大于所述第一单平衡阀的控制比,所述第三单平衡阀的控制比大于所述第四单平衡阀的控制比。
6、在一些实施方式中,所述第二单平衡阀的控制比和所述第三单平衡阀的控制比均介于7:1至9:1之间。
7、在一些实施方式中,所述第一单平衡阀的控制比和所述第四单平衡阀的控制比均介于2:1至4:1之间。
8、在一些实施方式中,所述并联平衡阀a的平衡阀先导油路连接至所述第二内部油路,所述并联平衡阀b的平衡阀先导油路连接至所述第一内部油路。
9、在一些实施方式中,所述第一单平衡阀、所述第二单平衡阀、所述第三单平衡阀和所述第四单平衡阀的平衡阀开启压力均能够调节。
10、根据本申请的第二方面,还提供了一种油缸控制系统,所述油缸控制系统包括:
11、液压油缸和主换向阀,所述液压油缸的无杆腔与所述主换向阀的第一工作油口之间连接无杆腔工作油路,所述液压油缸的有杆腔与所述主换向阀的第二工作油口之间连接有杆腔工作油路;和
12、上述的平衡阀组,所述并联平衡阀a设置在所述无杆腔工作油路中,所述并联平衡阀b设置在所述有杆腔工作油路中。
13、在一些实施方式中,所述第一截止阀和所述第二截止阀均为电磁开关阀,所述油缸控制系统包括:
14、位移感应器,用于检测所述液压油缸的实时活塞位置;以及
15、控制器,与所述位移感应器、所述第一截止阀和所述第二截止阀通讯并用于根据所述实时活塞位置的信息开关控制所述第一截止阀和所述第二截止阀。
16、在一些实施方式中,所述控制器被配置为:
17、确定所述主换向阀的第一工作油口为进油油口且所述第二工作油口为回油油口;
18、控制断开所述第一截止阀;
19、确定所述实时活塞位置为活塞行程极限位置,控制断开所述第二截止阀;
20、确定所述实时活塞位置为活塞行程常规位置,控制闭合所述第二截止阀。
21、在一些实施方式中,所述控制器还被配置为:
22、确定所述主换向阀的第二工作油口为进油油口且所述第一工作油口为回油油口;
23、控制断开所述第二截止阀;
24、确定所述实时活塞位置为活塞行程极限位置,控制断开所述第一截止阀;
25、确定所述实时活塞位置为活塞行程常规位置,控制闭合所述第一截止阀。
26、在一些实施方式中,所述主换向阀为电磁换向阀,所述控制器与所述主换向阀通讯并被用于根据所述主换向阀的电磁铁通电状态确定所述第一工作油口和所述第二工作油口的进油回油工况。
27、根据本申请的第三方面,还提供了一种高空作业平台,所述高空作业平台包括上述的油缸控制系统。
28、在本申请的平衡阀组、油缸控制系统和高空作业平台中,平衡阀组的两侧可分别采用两个单平衡阀,两个单平衡阀包括高控制比和低控制比类型,并且两侧分别设置截止阀以选择适用的单平衡阀。在此基础上,通过检测判断油缸的实时位置,选择合适控制比的单平衡阀,在需要稳定性能时,选择低控制比的单平衡阀,在平稳运行时,选择高控制比的单平衡阀,从而油缸运行更平稳,也更加经济、节能,兼顾稳定性和低能耗。
29、本申请实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.平衡阀组,其特征在于,所述平衡阀组包括:
2.根据权利要求1所述的平衡阀组,其特征在于,所述第二单平衡阀(2)的控制比和所述第三单平衡阀(3)的控制比均介于7:1至9:1之间。
3.根据权利要求1所述的平衡阀组,其特征在于,所述第一单平衡阀(1)的控制比和所述第四单平衡阀(4)的控制比均介于2:1至4:1之间。
4.根据权利要求1所述的平衡阀组,其特征在于,所述并联平衡阀a的平衡阀先导油路连接至所述第二内部油路(l2),所述并联平衡阀b的平衡阀先导油路连接至所述第一内部油路(l1)。
5.根据权利要求1~4中任意一项所述的平衡阀组,其特征在于,所述第一单平衡阀(1)、所述第二单平衡阀(2)、所述第三单平衡阀(3)和所述第四单平衡阀(4)的平衡阀开启压力均能够调节。
6.油缸控制系统,其特征在于,所述油缸控制系统包括:
7.根据权利要求6所述的油缸控制系统,其特征在于,所述第一截止阀(10)和所述第二截止阀(20)均为电磁开关阀,所述油缸控制系统包括:
8.根据权利要求7所述的油缸控制系统,其特征在于,所述控制器被配置为:
9.根据权利要求7所述的油缸控制系统,其特征在于,所述控制器还被配置为:
10.根据权利要求7所述的油缸控制系统,其特征在于,所述主换向阀(5)为电磁换向阀,所述控制器与所述主换向阀(5)通讯并被用于根据所述主换向阀(5)的电磁铁通电状态确定所述第一工作油口(a1)和所述第二工作油口(a2)的进油回油工况。
11.高空作业平台,其特征在于,所述高空作业平台包括根据权利要求6~10中任意一项所述的油缸控制系统。
技术总结
本申请公开了一种高空作业平台及其液压控制系统,平衡阀组包括并联平衡阀A,包括并联设置在第一内部油路中的第一单平衡阀和第一截止阀以及设置在第一旁通油路中的第二单平衡阀,第一旁通油路并联连接于第一内部油路的两端油口;并联平衡阀B,包括并联设置在第二内部油路中的第三单平衡阀和第二截止阀以及设置在第二旁通油路中的第四单平衡阀,第二旁通油路并联连接于第二内部油路的两端油口;在平衡阀组内,第一内部油路和第二内部油路相互独立,第二单平衡阀的控制比大于第一单平衡阀的控制比,第三单平衡阀的控制比大于第四单平衡阀的控制比。本申请通过检测油缸实时位置,选择合适控制比的单平衡阀,可兼顾油缸运行稳定性和低能耗。
技术研发人员:陈清,肖承丰,王光辉,宋易达
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!