一种嵌套式双万向节机构的制作方法
本发明涉及一种机械连接机构,特别涉及一种嵌套式双万向节机构。
背景技术:
1、为了实现柔顺的机械连接或实现机器人关节的灵活运转,很多传动机构都涉及到万向节的使用,目前市面上的万向节都是单一结构,只能作为基础的机械连接,多为从动连接结构,不能作为一个整体关节进行应用,使用上具有一定的局限性,也不能作为独立机构使用。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种嵌套式双万向节机构,该机构具有俯仰、偏摆及自转三个自由度,可以实现任意方向定点自转。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种嵌套式双万向节机构,包括固定支架、第一输出轴、第二输出轴、内万向节机构及外万向节机构,其中第一输出轴嵌设于第二输出轴的内侧,且与第二输出轴转动连接;
4、第一输出轴通过内万向节机构与固定支架转动连接;
5、第二输出轴通过外万向节机构与固定支架转动连接。
6、所述内万向节机构包括上轴和下轴组件,其中下轴组件和上轴的一端通过十字轴铰链铰接,下轴组件的另一端与所述固定支架转动连接,上轴的另一端与第一输出轴连接。
7、所述上轴另一端连接有球头轴,球头轴通过对称设置的两个第一输出轴固定销与所述第一输出轴连接。
8、所述固定支架的底部设有驱动源扩展板,所述下轴组件与所述驱动源扩展板转动连接。
9、所述下轴组件包括下轴和转接轴,其中转接轴的下端通过转接轴支撑轴承与所述驱动源扩展板连接,转接轴的上端与下轴的下端固定连接,下轴的上端与所述十字轴铰链连接。
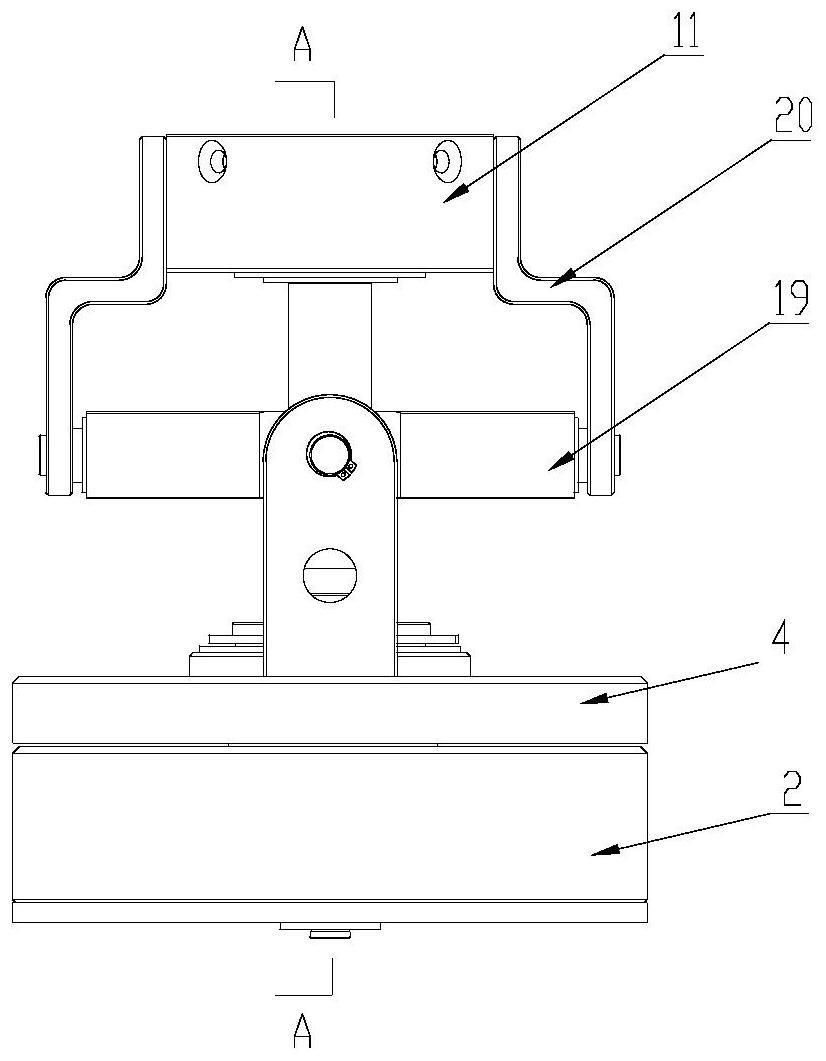
10、所述外万向节机构包括转架、十字链环及链环支架,其中转架与所述固定支架转动连接;十字链环与转架和链环支架铰接,且十字链环和转架之间的转动轴线与链环支架和十字链环之间的转动轴线垂直;链环支架与所述第二输出轴固定连接;第二输出轴通过第二输出轴支撑轴承与所述第一输出轴连接。
11、所述固定支架的顶部设有凸起结构,该凸起结构通过外万向节旋转轴承与所述转架的底部连接。
12、所述转架的顶部对称设有两个支座,两支座通过外环转轴与所述十字链环转动连接。
13、本发明的优点及有益效果是:本发明提出一种嵌套式双万向节机构,包含了内万向节与外万向节两种万向节,内外双万向节嵌套式组装,实现相互独立的自转,同时又可实现任意位置的摆动,两个万向节嵌套组装实现侧摆和俯仰两个自由度,同时不论侧摆或俯仰至任意位置均可实现相互独立的旋转,即双旋转轴输出。
14、本发明采用双万向节实现四自由度设计,侧摆、俯仰、内旋转及外旋转;所有转动连接统一采用销轴转接,简单实用,型号可互换,成本低,高刚度;
15、本发明即可作为连接机构用于机械连接,也可安装电机作为关节模块用于所有机器人自主驱动关节。
技术特征:
1.一种嵌套式双万向节机构,其特征在于,包括固定支架(2)、第一输出轴(10)、第二输出轴(11)、内万向节机构及外万向节机构,其中第一输出轴(10)嵌设于第二输出轴(11)的内侧,且与第二输出轴(11)转动连接;
2.根据权利要求1所述的嵌套式双万向节机构,其特征在于,所述内万向节机构包括上轴(15)和下轴组件,其中下轴组件和上轴(15)的一端通过十字轴铰链铰接,下轴组件的另一端与所述固定支架(2)转动连接,上轴(15)的另一端与第一输出轴(10)连接。
3.根据权利要求2所述的嵌套式双万向节机构,其特征在于,所述上轴(15)另一端连接有球头轴(14),球头轴(14)通过对称设置的两个第一输出轴固定销(12)与所述第一输出轴(10)连接。
4.根据权利要求2所述的嵌套式双万向节机构,其特征在于,所述固定支架(2)的底部设有驱动源扩展板(1),所述下轴组件与所述驱动源扩展板(1)转动连接。
5.根据权利要求4所述的嵌套式双万向节机构,其特征在于,所述下轴组件包括下轴(16)和转接轴(17),其中转接轴(17)的下端通过转接轴支撑轴承(18)与所述驱动源扩展板(1)连接,转接轴(17)的上端与下轴(16)的下端固定连接,下轴(16)的上端与所述十字轴铰链连接。
6.根据权利要求1所述的嵌套式双万向节机构,其特征在于,所述外万向节机构包括转架(4)、十字链环(19)及链环支架(20),其中转架(4)与所述固定支架(2)转动连接;十字链环(19)与转架(4)和链环支架(20)铰接,且十字链环(19)和转架(4)之间的转动轴线与链环支架(20)和十字链环(19)之间的转动轴线垂直;链环支架(20)与所述第二输出轴(11)固定连接;第二输出轴(11)通过第二输出轴支撑轴承(13)与所述第一输出轴(10)连接。
7.根据权利要求6所述的嵌套式双万向节机构,其特征在于,所述固定支架(2)的顶部设有凸起结构,该凸起结构通过外万向节旋转轴承(3)与所述转架(4)的底部连接。
8.根据权利要求6所述的嵌套式双万向节机构,其特征在于,所述转架(4)的顶部对称设有两个支座,两支座通过外环转轴(5)与所述十字链环(19)转动连接。
技术总结
本发明涉及一种机械连接机构,特别涉及一种嵌套式双万向节机构。包括固定支架、第一输出轴、第二输出轴、内万向节机构及外万向节机构,其中第一输出轴嵌设于第二输出轴的内侧,且与第二输出轴转动连接;第一输出轴通过内万向节机构与固定支架转动连接;第二输出轴通过外万向节机构与固定支架转动连接。本发明采用双万向节嵌套式设计,双输出轴独立自转,内、外万向节互为随动机构,可实现末端任意位置定点独立自转。
技术研发人员:刘世昌,邹风山,宛月,梁亮,王冬雷,栾显晔
受保护的技术使用者:山东新松工业软件研究院股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!