一种带辅助停止和快速启动结构式模组的制作方法
1.本实用新型涉及模组领域,具体涉及一种带辅助停止和快速启动结构式模组。
背景技术:
2.模组有几种叫法,线性模组、直角坐标机器人、直线滑台等,是继直线导轨、直线运动模组、滚珠丝杆直线传动机构的自动化升级单元;可以通过各个单元的组合实现负载的直线、曲线运动,使轻负载的自动化更加灵活、定位更加精准。
3.现在常用的模组在启动的时候由于螺母座和丝杆之间的预警力的于存在,以及丝杆刚性的存在,模组在极限位置处启动和停止的时候消耗大量的能量,且影响模组在极限位置处的精度。
技术实现要素:
4.本实用新型的目的是:提供一种带辅助停止和快速启动结构式模组,解决以上问题。
5.为了实现上述目的,本实用新型提供如下的技术方案:
6.一种带辅助停止和快速启动结构式模组,包括主体、丝杆以及螺母座,其特征在于:所述主体上设置有顶板,所述顶板上设置有避位槽和放置槽,所述避位槽和放置槽连通,所述放置槽位于顶板上远离螺母座处,所述丝杆贯通放置槽和避位槽,所述顶板通过弹性元件活动连接有接触件,所述丝杆贯通接触件和弹性元件,所述弹性元件具体位于放置槽内,所述接触件与螺母座位置相对应,所述接触件与避位槽位置相对应。
7.进一步的,所述接触件与避位槽尺寸相配合,所述弹性元件位于丝杆的外侧,所述接触件上设置有过孔和斜面,所述放置槽和避位槽连通。
8.进一步的,所述过孔与放置槽和避位槽同心,所述丝杆贯通过孔,所述弹性元件具体为弹簧,所述斜面位于接触件上靠近避位槽的面上。
9.进一步的,所述过孔和弹性元件与丝杆分离,所述弹性元件长度与放置槽和避位槽的深度尺寸相配合。
10.进一步的,所述接触件的数量不少于一个,所述顶板具体有两个,两个所述顶板位于螺母座的两侧。
11.本实用新型的有益效果为:提供一种带辅助停止和快速启动结构式模组,通过主体、丝杆、螺母座、避位槽、放置槽、接触件以及弹性元件相互配合使用,通过在模组的极限位置处增加弹性元件,实现在模组的极限位置处辅助模组停止,和模组启动时增加螺母座的受力快速启动的效果,降低了模组的能量消耗,提高了模组在极限位置处的精度,提升了模组的性能。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例
或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
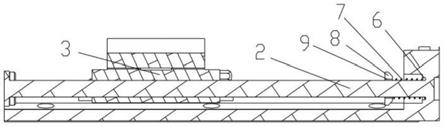
13.图1为本实用新型一种带辅助停止和快速启动结构式模组的整体结构轴测图。
14.图2为本实用新型一种带辅助停止和快速启动结构式模组的部分结构轴测图。
15.图3为图2中a部分的局部放大图。
16.图4为本实用新型一种带辅助停止和快速启动结构式模组的部分结构剖视图。
17.图中:1、主体;2、丝杆;3、螺母座;4、顶板;5、避位槽;6、放置槽;7、弹性元件;8、接触件;9、过孔;10、斜面。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型作进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
19.参考图1至图4,一种带辅助停止和快速启动结构式模组,包括主体1、丝杆2以及螺母座 3,其特征在于:所述主体1上设置有顶板4,用于放置弹性元件7,所述顶板4上设置有避位槽5和放置槽6,所述避位槽5和放置槽6连通,所述放置槽6位于顶板4上远离螺母座3处,用于放置弹性元件7,所述丝杆2贯通放置槽6和避位槽5,所述顶板4通过弹性元件7活动连接有接触件8,所述丝杆2贯通接触件8和弹性元件7,所述弹性元件7具体位于放置槽6内,所述接触件8与螺母座3位置相对应,用于在模组停止和启动时对螺母座3产生推力,从而实现辅助停止和快速启动模组的效果,所述接触件8与避位槽5位置相对应,用于在弹性元件8被压缩后放置接触件8,所述主体1与外部控制系统电性连接。
20.所述接触件8与避位槽5尺寸相配合,所述弹性元件7位于丝杆2的外侧,所述接触件8上设置有过孔9和斜面10,所述放置槽6和避位槽5连通。
21.所述过孔9与放置槽6和避位槽5同心,所述丝杆2贯通过孔9,所述弹性元件7具体为弹簧,所述斜面10位于接触件8上靠近避位槽5的面上,用于方便接触件8进入避位槽5。
22.所述过孔9和弹性元件7与丝杆2分离,避免丝杆2带动弹性元件7和接触件8运动,所述弹性元件7长度与放置槽6和避位槽5的深度尺寸相配合。
23.所述接触件8的数量不少于一个,所述顶板4具体有两个,两个所述顶板4位于螺母座3的两侧,用于在模组的两个极限位置处对螺母座产生推力,进而实现在两个极限位置处均可以辅助停止和快速启动模组。
24.本实用新型的工作原理为:当开始使用模组时,在外部控制系统的控制下模组的螺母座 3到达极限位置处时,模组开始降低速度并停止,在此过程中接触件8首先接触螺母座3并压缩弹性元件7,在此过程中弹性元件7通过接触件8对螺母座3产生推力辅助模组的主体1降低螺母座3的速度,最终螺母座3将接触件8压到避位槽5内;当螺母座3在极限位置处开始启动模组时,在外部控制系统的控制下螺母座3被主体1带动开始远离接触件8,在此过程中弹性元件7复位并通过接触件8对螺母座3产生推力,从而更加快速的将模组启动,当螺母座3与接触件8分离时弹性元件7复位完成;此时模组正常工作。
25.本实用新型中应用了具体实施例对本实用新型的原理及实施方式进行了阐述,以
上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种带辅助停止和快速启动结构式模组,包括主体、丝杆以及螺母座,其特征在于:所述主体上设置有顶板,所述顶板上设置有避位槽和放置槽,所述避位槽和放置槽连通,所述放置槽位于顶板上远离螺母座处,所述丝杆贯通放置槽和避位槽,所述顶板通过弹性元件活动连接有接触件,所述丝杆贯通接触件和弹性元件,所述弹性元件具体位于放置槽内,所述接触件与螺母座位置相对应,所述接触件与避位槽位置相对应。2.根据权利要求1所述的一种带辅助停止和快速启动结构式模组,其特征在于:所述接触件与避位槽尺寸相配合,所述弹性元件位于丝杆的外侧,所述接触件上设置有过孔和斜面,所述放置槽和避位槽连通。3.根据权利要求2所述的一种带辅助停止和快速启动结构式模组,其特征在于:所述过孔与放置槽和避位槽同心,所述丝杆贯通过孔,所述弹性元件具体为弹簧,所述斜面位于接触件上靠近避位槽的面上。4.根据权利要求3所述的一种带辅助停止和快速启动结构式模组,其特征在于:所述过孔和弹性元件与丝杆分离,所述弹性元件长度与放置槽和避位槽的深度尺寸相配合。5.根据权利要求1所述的一种带辅助停止和快速启动结构式模组,其特征在于:所述接触件的数量不少于一个,所述顶板具体有两个,两个所述顶板位于螺母座的两侧。
技术总结
本实用新型涉及一种带辅助停止和快速启动结构式模组,包括主体、丝杆以及螺母座,其特征在于:所述主体上设置有顶板,所述顶板上设置有避位槽和放置槽,所述避位槽和放置槽连通,所述放置槽位于顶板上远离螺母座处,所述丝杆贯通放置槽和避位槽,所述顶板通过弹性元件活动连接有接触件,所述丝杆贯通接触件和弹性元件,所述弹性元件具体位于放置槽内,所述接触件与螺母座位置相对应,所述接触件与避位槽位置相对应。本实用新型提供一种带辅助停止和快速启动结构式模组,降低了模组的能量消耗,提高了模组在极限位置处的精度,提升了模组的性能。组的性能。组的性能。
技术研发人员:张伟
受保护的技术使用者:威奥博仕机器人(昆山)有限公司
技术研发日:2021.02.19
技术公布日:2021/11/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1