一种伺服驱动可调节环形支撑机构的制作方法
1.本实用新型涉及到一种可调节环形支撑机构辅助设备领域,具体涉及到一种伺服驱动可调节环形支撑机构。
背景技术:
2.环形支撑为常用的管道维修作业工作设备,现有的环形支撑机构结构复杂,功能单一,需要人工现场拆装部件多,因此这样的环形支撑机构在使用过程中非常不方便,工人在组装和拆卸的过程中需要耗费大量的人力物力。
技术实现要素:
3.本实用新型所要解决的技术问题在于一种伺服驱动可调节环形支撑机构,环形支撑直径可以实现伺服驱动下的自动调节,根据不同管径需求自动调节支撑直径,提高工人的工作效率,降低工人劳动强度的。
4.为了实现上述目的,本实用新型提供的技术方案是:
5.本实用新型涉及到一种伺服驱动可调节环形支撑机构。包括支撑脚轮,支撑脚轮通过螺钉固定在支撑调节臂上,支撑调节臂通过螺钉固定在机械摆臂上,机械摆臂与外架体通过旋转销轴连接,滑动销轴被固定在机械摆臂上同时被限制在过渡滑块的圆弧槽内滑动,过渡滑块用螺钉固定在内架体上,内架体上安装有感应开关,感应开关可以感应到位置感应板的位置,伺服电机安装在内架体上,伺服电机主轴通过连轴器与滚珠丝杠相连,滚珠丝杠螺母固定在外架体上,外架体上装有位置感应板,内架体上安装有位置检测感应开关。伺服电机转动带动丝杠转动,丝杠螺母将丝杠的旋转运动转换为直线移动,实现对内外架体间的直线距离变化,当内外架体间距增大时,滑动销轴沿着过渡滑块的圆弧槽被抬起,滑动销轴带动机械摆臂绕旋转销轴转动抬升,支撑脚轮和支撑调节臂被机械摆臂向外举升,支撑轮的支撑直径加大,实现伺服驱动对支撑直径的自动调节,来适应不同支撑直径的需求,结构简单,调节方便灵活。
6.具体的,伺服电机固定在内架体上。
7.具体的,伺服电机通过连轴器与滚珠丝杠相连,滚珠丝杠螺母固定在外架体上。
8.具体的,机械摆臂与外架体通过旋转销轴连接。
9.具体的,滑动销轴被固定在机械摆臂上同时被限制在过渡滑块的圆弧槽内滑动。
10.具体的,过渡滑块用螺钉固定在内架体上。
11.具体的,外架体上装有位置感应板,内架体上装有位置检测感应开关。
12.具体的,伺服电机驱动控制内外架体间的距离,机械摆臂带动行走脚轮张开或收缩。
13.与现有技术相比,本实用新型的有益效果为:
14.本实用新型,结构简单,使用方便,使用后可以进行折叠后运输移动,折叠前无需拆卸过多的松散零件,能够降低组装时间,提高工人的工作效率,降低工人的劳动强度。
附图说明
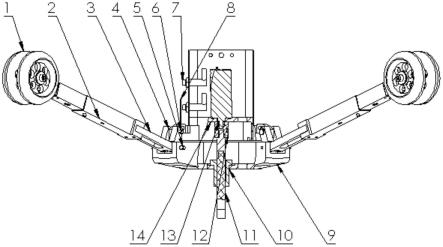
15.图1为本实用新型的结构示意图。
16.附图中的零部件名称为:
17.1、支撑脚轮,2、支撑调节臂,3、机械摆臂,4、过渡滑块,5、旋转销轴,6、滑动销轴,7、感应开关,8、位置感应板,9、外架体,10、滚珠丝杠螺母,11、滚珠丝杠,12、连轴器,13、伺服电机,14、内架体。
具体实施方式
18.如图1所示,一种伺服驱动可调节环形支撑机构,包括支撑脚轮1,支撑脚轮1通过螺钉固定在支撑调节臂2上,支撑调节臂2通过螺钉固定在机械摆臂3上,机械摆臂3与外架体9通过旋转销轴5连接,滑动销轴6被固定在机械摆臂3上同时被限制在过渡滑块4的圆弧槽内滑动,过渡滑块4用螺钉固定在内架体14上,内架体上安装有感应开关7,位置感应板8通过螺钉固定在外架体9上,伺服电机13安装在内架体14上,伺服电机13的主轴通过连轴器12与滚珠丝杠11相连,滚珠丝杠螺母10固定在外架体9上。
19.本实用新型需要调节环形支撑机构的支撑直径时,伺服电机启动带动丝杠转动,丝杠螺母将丝杠的旋转运动转换为直线移动,实现对内外架体间的直线距离变化,当内外架体间距增大时,滑动销轴沿着过渡滑块的圆弧槽被抬起,滑动销轴带动机械摆臂绕旋转销轴转动抬升,支撑脚轮和支撑调节臂被机械摆臂向外举升,支撑轮的支撑直径加大,实现伺服驱动对支撑直径的自动调节,来适应不同支撑直径的需求,结构简单,调节方便灵活。
20.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种伺服驱动可调节环形支撑机构,包括支撑脚轮(1),支撑脚轮(1)通过螺钉固定在支撑调节臂(2)上,支撑调节臂(2)通过螺钉固定在机械摆臂(3)上,机械摆臂(3)与外架体(9)通过旋转销轴(5)连接,滑动销轴(6)被固定在机械摆臂(3)上同时被限制在过渡滑块(4)的圆弧槽内滑动,过渡滑块(4)用螺钉固定在内架体(14)上,内架体上安装有感应开关(7),位置感应板(8)通过螺钉固定在外架体(9)上,伺服电机(13)安装在内架体(14)上,伺服电机(13)的主轴通过连轴器(12)与滚珠丝杠(11)相连,滚珠丝杠螺母(10)固定在外架体(9)上。2.根据权利要求1所述一种伺服驱动可调节环形支撑机构,其特征在于,所述伺服电机(13)安装在内架体(14)上。3.根据权利要求1所述一种伺服驱动可调节环形支撑机构,其特征在于,滚珠丝杠螺母(10)固定在外架体(9)上。4.根据权利要求1所述一种伺服驱动可调节环形支撑机构,其特征在于,所述机械摆臂(3)与外架体(9)通过旋转销轴(5)连接。5.根据权利要求1所述一种伺服驱动可调节环形支撑机构,其特征在于,所述过渡滑块(4)用螺钉固定在内架体(14)上。
技术总结
本实用新型涉及到一种伺服驱动可调节环形支撑机构。包括支撑脚轮,支撑脚轮通过螺钉固定在支撑调节臂上,支撑调节臂通过螺钉固定在机械摆臂上,机械摆臂与外架体通过旋转销轴连接,滑动销轴被固定在机械摆臂上同时被限制在过渡滑块的圆弧槽内滑动,过渡滑块用螺钉固定在内架体上,内架体上安装有感应开关,感应开关可以感应到位置感应板的位置,伺服电机安装在内架体上,伺服电机主轴通过连轴器与滚珠丝杠相连,滚珠丝杠螺母固定在外架体上,外架体上装有位置感应板,内架体上安装有位置检测感应开关。实现了伺服驱动对支撑直径的自动调节,来适应不同支撑直径的需求。本实用新型,结构简单,调节方便,减少了设备成本。减少了设备成本。减少了设备成本。
技术研发人员:郭循昌 孙君强 王玉峰
受保护的技术使用者:河南兴兴管道工程技术有限公司
技术研发日:2021.09.02
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1