截止阀和建筑机器人的制作方法
本发明涉及建筑施工设备,特别涉及一种截止阀和应用该截止阀的建筑机器人。
背景技术:
1、相关技术中,截止阀主要运用在水等液态流体上,该截止阀通过在阀的通道内旋转的阀芯的形式来控制通道的通断,但在建筑机器人领域,管道内输送的物质主要是水泥砂浆等混有较多固体的流体,且水泥砂浆具有黏稠性,容易粘附、堆积并凝固在阀门上,导致阀门被卡住无法转动,经常需要更换或者清理,所以在砂浆管道内使用现有技术的截止阀无法达到理想的效果。
技术实现思路
1、本发明的主要目的是提供一种截止阀,旨在确保在建筑机器人施工作业过程中,截止阀保持持续顺畅运行。
2、为实现上述目的,本发明提出的截止阀,包括:
3、座体组件,内形成有供浆通道和导向通道,所述导向通道将所述供浆通道截断;
4、驱动组件,安装于所述座体组件;以及
5、阀芯,具有第一部分和第二部分,所述第一部分伸入所述导向通道内,所述第二部分与所述驱动组件连接,所述第一部分设置有封堵区以及连通孔,所述阀芯在所述驱动组件的驱动下沿所述导向通道运动,以使得所述截止阀具有所述封堵区封堵所述供浆通道的封堵状态和所述连通孔连通所述供浆通道的导通状态;
6、其中,所述座体组件还设置有开口,所述开口连通所述导向通道和外界,所述第一部分的运动过程中的运动方向于至少一个时刻朝向所述开口设置。
7、在本发明一实施例中,所述第一部分在所述驱动组件驱动下,沿着左右延伸的直线轨迹于所述导向通道往复运动,所述座体组件于所述导向通道的左右两端的至少一端设置有所述开口。
8、在本发明一实施例中,所述导向通道的左右两端均设置有所述开口,所述第一部分的往复运动包括两个单向运动,两个所述单向运动的运动方向分别朝向左右两端的所述开口。
9、在本发明一实施例中,所述导向通道具有槽底,所述第一部分的下端适配所述槽底往复滑动,两个所述开口分别设置于所述槽底的左右两端。
10、在本发明一实施例中,所述开口的下边缘向上不超过所述槽底。
11、在本发明一实施例中,所述导向通道为在水平方向左右延伸且中心线为直线的直线通道,所述槽底为左右延伸的水平面,所述第一部分下端为左右延伸的水平面。
12、在本发明一实施例中,所述导向通道下端设置有所述开口,下端的所述开口与设置于左右方向上的所述开口彼此连通。
13、在本发明一实施例中,所述第一部分在所述驱动组件旋转驱动下,沿着左右延伸的弧线轨迹往复摆动于所述导向通道的左右两端之间,所述第一部分的旋转轴位于所述弧形轨迹的上方,所述导向通道的左右两端以及所述导向通道的下端中的至少一端设置有所述开口。
14、在本发明一实施例中,所述导向通道的左右两端以及所述导向通道的下端中的均设置有所述开口,所述往复摆动包括两个单向运动,每一所述单向运动朝向左右两端所述开口的其一以及朝向下端所述开口。
15、在本发明一实施例中,所述导向通道具有弧形槽底,所述第一部分的下端适配所述槽底往复滑动,下端的所述开口自所述槽底贯通外界。
16、在本发明一实施例中,左右两端的所述开口分别位于所述槽底的两端,左右两端的所述开口的下边缘向上不超过所述槽底的端缘。
17、在本发明一实施例中,所述第一部分呈板体结构,沿垂直于所述导向通道的横截面观察,所述导向通道的截面形状与所述第一部分适配。
18、在本发明一实施例中,所述连通孔自第一部分的板状结构凹设形成,所述第一部分的其余区域形成所述封堵区,和/或,所述连通孔靠近所述第一部分的左右方向上的一侧边缘设置。
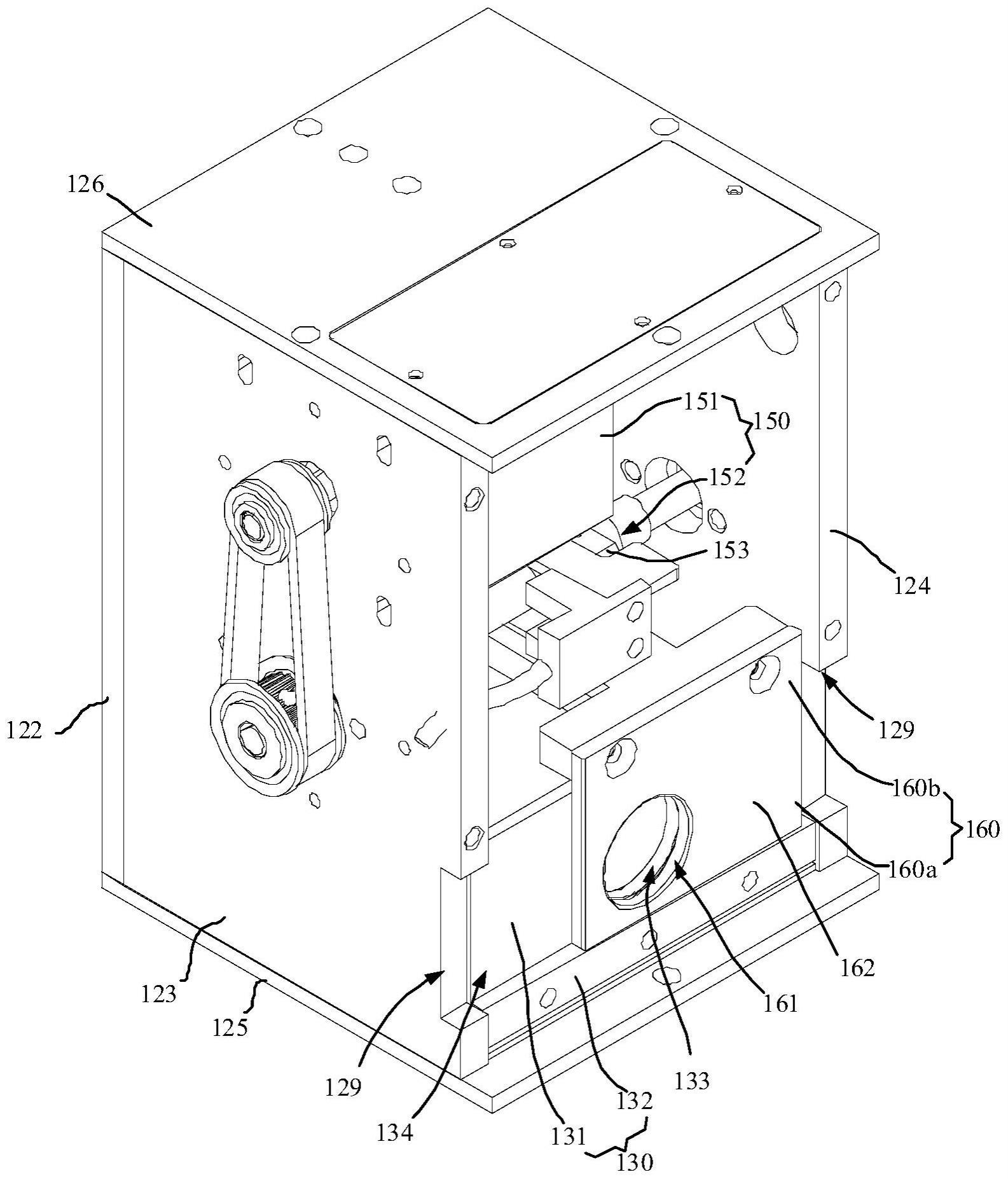
19、在本发明一实施例中,所述座体组件包括:
20、一座箱,其具有多个侧壁以及有多个侧壁围成的内置空间,所述阀芯和所述驱动组件安装于所述内置空间内;
21、一阀座,安装于所述内置空间内且与所述多个侧壁中的前侧壁前后间隔限定形成所述导向通道,所述前侧壁具有形成有对接口,所述阀座形成有转接孔,所述对接口和所述转接孔前后相对设置形成所述供浆通道的一部分;
22、当处于所述导通状态时,所述连通孔的至少部分前后连通所对接口和所述转接孔;
23、当处于所述封堵状态时,所述封堵区止挡于所对接口和所述转接孔之间。
24、在本发明一实施例中,所述阀座包括连接成l形的限位板和支撑板,所述前侧壁和所述限位板前后相对形成所述导向通道的前后内壁,所述转接孔设置在所述限位板上,所述限位板上开设有所述转接孔,所述支撑板向前抵接所述前侧壁且其上表面形成所述导向通道的槽底。
25、在本发明一实施例中,多个所述侧壁包括与所述前侧壁相对设置的后侧壁,所述前侧壁和所述后侧壁分别开设有所述对接口;
26、所述供浆通道还包括连接管,所述连接管的一端口与所述后侧壁上的对接口连通,所述连接管的另一端口与所述转接孔连通。
27、在本发明一实施例中,所述驱动组件位于所述阀芯和所述阀座的上方。
28、在本发明一实施例中,所述驱动组件包括安装于所述座箱的驱动电机和丝杠模组,所述驱动电机驱动所述丝杠模组的丝杆螺母左右位移,所述第二部分与所述丝杠模组中的丝杠螺母连接。
29、在本发明一实施例中,所述座箱上还设置有用于对所述第一部分进行位置检测的位置检测结构。
30、在本发明一实施例中,所述位置检测结构包括第一位置传感器和第二位置传感器,所述第一位置传感器用于在封堵状态时与所述阀芯配合产生检测信号,所述第二位置传感器用于在导通状态时与所述阀芯配合产生检测信号。
31、在本发明一实施例中,所述座箱上还设置用于将截止阀进行安装固定的安装结构。
32、本发明还提出一种建筑机器人,包括储浆装置、作业执行终端以及连接在储浆装置和作业执行终端之间的截止阀,所述截止阀为如上所述的截止阀。
33、本发明技术方案通过在截止阀的结构中,设置截断供浆通道并且连通外界的导向通道,阀芯设置为沿着导向通道运动,由此,在建筑施工作业过程中,在控制截止阀的供浆通道的通断过程中,由于阀芯是沿着截断供浆通道的方向运动,因此是切向作用到供浆通道内的粘稠浆液,这样的运动方式,相较于现有的阀芯在供浆通道内旋转的方式,粘稠浆液对阀芯的阻力较小,因此可以确保阀芯在切断供浆通道的过程中运行顺畅,同时,由于导向通道连通外界,阀芯的运动过程中的运动方向于至少一个时刻朝向开口设置,在长时间使用的过程中,由阀芯和导向通道的缝隙处渗漏至导向通道内的浆液,一方面可以在阀芯运动过程中由阀芯从开口推出至外界,另一方面,也便于通过导向通道向阀芯位置喷射清洗溶液,这样在长时间使用时,可以避免在浆液在阀芯位置凝固,维护过程也较为方便。
技术特征:
1.一种截止阀,其特征在于,包括:
2.如权利要求1所述的截止阀,其特征在于,所述第一部分在所述驱动组件驱动下,沿着左右延伸的直线轨迹于所述导向通道往复运动,所述座体组件于所述导向通道的左右两端的至少一端设置有所述开口。
3.如权利要求2所述的截止阀,其特征在于,所述导向通道的左右两端均设置有所述开口,所述第一部分的往复运动包括两个单向运动,两个所述单向运动的运动方向分别朝向左右两端的所述开口。
4.如权利要求3所述的截止阀,其特征在于,所述导向通道具有槽底,所述第一部分的下端适配所述槽底往复滑动,两个所述开口分别设置于所述槽底的左右两端。
5.如权利要求4所述的截止阀,其特征在于,所述开口的下边缘向上不超过所述槽底。
6.如权利要求4所述的截止阀,其特征在于,所述导向通道为在水平方向左右延伸且中心线为直线的直线通道,所述槽底为左右延伸的水平面,所述第一部分下端为左右延伸的水平面。
7.如权利要求2所述的截止阀,其特征在于,所述导向通道下端设置有所述开口,下端的所述开口与设置于左右方向上的所述开口彼此连通。
8.如权利要求1所述的截止阀,其特征在于,所述第一部分在所述驱动组件旋转驱动下,沿着左右延伸的弧线轨迹往复摆动于所述导向通道的左右两端之间,所述第一部分的旋转轴位于所述弧形轨迹的上方,所述导向通道的左右两端以及所述导向通道的下端中的至少一端设置有所述开口。
9.如权利要求8所述的截止阀,其特征在于,所述导向通道的左右两端以及所述导向通道的下端中的均设置有所述开口,所述往复摆动包括两个单向运动,每一所述单向运动朝向左右两端所述开口的其一以及朝向下端所述开口。
10.如权利要求9所述的截止阀,其特征在于,所述导向通道具有弧形槽底,所述第一部分的下端适配所述槽底往复滑动,下端的所述开口自所述槽底贯通外界。
11.如权利要求10所述的截止阀,其特征在于,左右两端的所述开口分别位于所述槽底的两端,左右两端的所述开口的下边缘向上不超过所述槽底的端缘。
12.如权利要求1所述的截止阀,其特征在于,所述第一部分呈板体结构,沿垂直于所述导向通道的横截面观察,所述导向通道的截面形状与所述第一部分适配。
13.如权利要求12所述的截止阀,其特征在于,所述连通孔自第一部分的板状结构凹设形成,所述第一部分的其余区域形成所述封堵区,和/或,所述连通孔靠近所述第一部分的左右方向上的一侧边缘设置。
14.如权利要求1至13中任意一项所述的截止阀,其特征在于,所述座体组件包括:
15.如权利要求14所述的截止阀,其特征在于,所述阀座包括连接成l形的限位板和支撑板,所述前侧壁和所述限位板前后相对形成所述导向通道的前后内壁,所述转接孔设置在所述限位板上,所述限位板上开设有所述转接孔,所述支撑板向前抵接所述前侧壁且其上表面形成所述导向通道的槽底。
16.如权利要求14所述的截止阀,其特征在于,多个所述侧壁包括与所述前侧壁相对设置的后侧壁,所述前侧壁和所述后侧壁分别开设有所述对接口;
17.如权利要求14所述的截止阀,其特征在于,所述驱动组件位于所述阀芯和所述阀座的上方。
18.如权利要求17所述的截止阀,其特征在于,所述驱动组件包括安装于所述座箱的驱动电机和丝杠模组,所述驱动电机驱动所述丝杠模组的丝杆螺母左右位移,所述第二部分与所述丝杠模组中的丝杠螺母连接。
19.如权利要求14所述的截止阀,其特征在于,所述座箱上还设置有用于对所述第一部分进行位置检测的位置检测结构。
20.如权利要求19所述的截止阀,其特征在于,所述位置检测结构包括第一位置传感器和第二位置传感器,所述第一位置传感器用于在封堵状态时与所述阀芯配合产生检测信号,所述第二位置传感器用于在导通状态时与所述阀芯配合产生检测信号。
21.如权利要求14所述的截止阀,其特征在于,所述座箱上还设置用于将截止阀进行安装固定的安装结构。
22.一种建筑机器人,其特征在于,包括储浆装置、作业执行终端以及连接在储浆装置和作业执行终端之间的截止阀,所述截止阀为如权利要求1至21中任意一项所述的截止阀。
技术总结
本发明公开一种截止阀和建筑机器人,属于建筑设备技术领域,截止阀包括座体组件、驱动组件以及阀芯,座体组件内形成有供浆通道和导向通道,导向通道将供浆通道截断,驱动组件安装于座体组件,阀芯具有第一部分和第二部分,第一部分伸入导向通道内,第二部分与驱动组件连接,第一部分设置有封堵区以及连通孔,阀芯在驱动组件的驱动下沿导向通道运动,以使得截止阀具有封堵区封堵供浆通道的封堵状态和连通孔连通供浆通道的导通状态;其中,座体组件还设置有开口,开口连通导向通道和外界,第一部分的运动过程中的运动方向于至少一个时刻朝向开口设置。本发明实现在建筑机器人施工作业过程中,截止阀保持持续顺畅运行。
技术研发人员:张敏,宋涛,谭晓勤,庞大海,刘昭
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!